A Review of Safe Reinforcement Learning: Methods, Theory and Applications
2205.10330
0
0
🏅
Abstract
Reinforcement Learning (RL) has achieved tremendous success in many complex decision-making tasks. However, safety concerns are raised during deploying RL in real-world applications, leading to a growing demand for safe RL algorithms, such as in autonomous driving and robotics scenarios. While safe control has a long history, the study of safe RL algorithms is still in the early stages. To establish a good foundation for future safe RL research, in this paper, we provide a review of safe RL from the perspectives of methods, theories, and applications. Firstly, we review the progress of safe RL from five dimensions and come up with five crucial problems for safe RL being deployed in real-world applications, coined as 2H3W. Secondly, we analyze the algorithm and theory progress from the perspectives of answering the 2H3W problems. Particularly, the sample complexity of safe RL algorithms is reviewed and discussed, followed by an introduction to the applications and benchmarks of safe RL algorithms. Finally, we open the discussion of the challenging problems in safe RL, hoping to inspire future research on this thread. To advance the study of safe RL algorithms, we release an open-sourced repository containing the implementations of major safe RL algorithms at the link: https://github.com/chauncygu/Safe-Reinforcement-Learning-Baselines.git.
Create account to get full access
Overview
- Reinforcement Learning (RL) has achieved great success in complex decision-making tasks
- However, deploying RL in real-world applications raises safety concerns
- There is a growing demand for safe RL algorithms, especially in domains like autonomous driving and robotics
- While safe control has a long history, the study of safe RL algorithms is still in the early stages
- This paper provides a review of safe RL from the perspectives of methods, theories, and applications
Plain English Explanation
Reinforcement learning (RL) is a type of machine learning that allows software agents to learn how to make decisions in complex environments. RL has been very successful in areas like game-playing and robotics, where the software learns through trial and error to make the best choices.
However, as RL is applied to more real-world scenarios, like self-driving cars or industrial robots, safety becomes a major concern. There is a risk that the software could make a mistake and cause harm. To address this, researchers are working on "safe RL" algorithms that can learn to make decisions while still ensuring safety.
This paper reviews the current state of safe RL research. It looks at the different methods and theories that have been developed, as well as some of the applications and benchmarks used to test these algorithms. The paper also discusses some of the key challenges and open problems in this area, with the goal of inspiring more research on making RL systems truly safe for real-world use.
The researchers have also released an open-source repository containing implementations of major safe RL algorithms, to help advance the field.
Technical Explanation
The paper first identifies five crucial problems for deploying safe RL in real-world applications, which it calls the "2H3W":
- How to define safety constraints?
- How to incorporate safety constraints into RL algorithms?
- What are the theoretical guarantees for safe RL algorithms?
- What are the sample complexities of safe RL algorithms?
- What are the real-world applications and benchmarks for safe RL?
The paper then analyzes the progress in safe RL algorithms and theories from the perspective of addressing these 2H3W problems. It reviews different methods for constraint formulation in safe RL, as well as techniques for verifying the safety of neural network policies.
The paper also discusses frameworks for balancing reward and safety objectives and theoretical guarantees for safe RL based on constraint manifold theory.
Additionally, the paper reviews the sample complexity of safe RL algorithms and highlights approaches that aim to optimize both reward and safety.
Finally, the paper discusses the current applications and benchmarks for safe RL, suggesting that more work is needed to develop appropriate real-world test scenarios.
Critical Analysis
The paper provides a comprehensive overview of the current state of safe RL research, identifying key challenges and highlighting important progress in addressing them. However, it also acknowledges that the field is still in the early stages, and there are many open problems that require further investigation.
One potential limitation is that the paper does not delve deeply into the specific technical details of the various safe RL algorithms and theories it covers. While this makes the review more accessible to a general audience, it may be less useful for researchers already working in the field.
Additionally, the paper does not critically examine the underlying assumptions or potential issues with some of the proposed approaches. For example, the reliance on constraint manifold theory for providing safety guarantees could be questioned, as it may not capture all the nuances of real-world safety considerations.
Further research is needed to develop safe RL algorithms that can reliably handle the complexities of real-world applications, such as dealing with uncertainty, partial observability, and changing environments. Additionally, more work is required to establish appropriate benchmarks and evaluation criteria for safe RL, to ensure that the algorithms are truly effective in promoting safety.
Conclusion
This paper provides a valuable overview of the current state of safe RL research, highlighting the key challenges and the progress made in addressing them. By identifying the crucial problems of safe RL deployment and reviewing the algorithmic and theoretical developments, the paper lays a foundation for future research in this important area.
The release of the open-source repository containing implementations of major safe RL algorithms is a commendable effort that can help accelerate the advancement of the field. As RL continues to be applied to more real-world scenarios, the need for safe and reliable algorithms will only grow. This paper serves as an important step in addressing this pressing challenge and paving the way for the widespread adoption of RL in safety-critical applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🏅
A Survey of Constraint Formulations in Safe Reinforcement Learning
Akifumi Wachi, Xun Shen, Yanan Sui
0
0
Safety is critical when applying reinforcement learning (RL) to real-world problems. As a result, safe RL has emerged as a fundamental and powerful paradigm for optimizing an agent's policy while incorporating notions of safety. A prevalent safe RL approach is based on a constrained criterion, which seeks to maximize the expected cumulative reward subject to specific safety constraints. Despite recent effort to enhance safety in RL, a systematic understanding of the field remains difficult. This challenge stems from the diversity of constraint representations and little exploration of their interrelations. To bridge this knowledge gap, we present a comprehensive review of representative constraint formulations, along with a curated selection of algorithms designed specifically for each formulation. In addition, we elucidate the theoretical underpinnings that reveal the mathematical mutual relations among common problem formulations. We conclude with a discussion of the current state and future directions of safe reinforcement learning research.
5/9/2024
🏅
Verified Safe Reinforcement Learning for Neural Network Dynamic Models
Junlin Wu, Huan Zhang, Yevgeniy Vorobeychik
0
0
Learning reliably safe autonomous control is one of the core problems in trustworthy autonomy. However, training a controller that can be formally verified to be safe remains a major challenge. We introduce a novel approach for learning verified safe control policies in nonlinear neural dynamical systems while maximizing overall performance. Our approach aims to achieve safety in the sense of finite-horizon reachability proofs, and is comprised of three key parts. The first is a novel curriculum learning scheme that iteratively increases the verified safe horizon. The second leverages the iterative nature of gradient-based learning to leverage incremental verification, reusing information from prior verification runs. Finally, we learn multiple verified initial-state-dependent controllers, an idea that is especially valuable for more complex domains where learning a single universal verified safe controller is extremely challenging. Our experiments on five safe control problems demonstrate that our trained controllers can achieve verified safety over horizons that are as much as an order of magnitude longer than state-of-the-art baselines, while maintaining high reward, as well as a perfect safety record over entire episodes.
5/28/2024
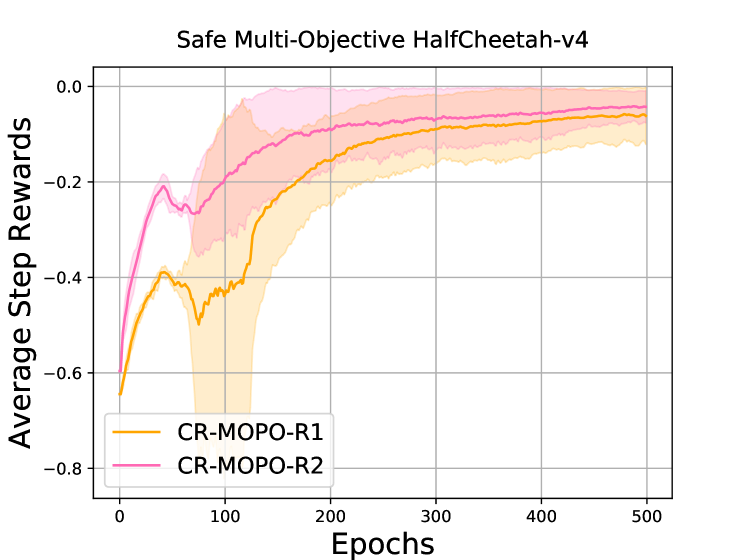
Safe and Balanced: A Framework for Constrained Multi-Objective Reinforcement Learning
Shangding Gu, Bilgehan Sel, Yuhao Ding, Lu Wang, Qingwei Lin, Alois Knoll, Ming Jin
0
0
In numerous reinforcement learning (RL) problems involving safety-critical systems, a key challenge lies in balancing multiple objectives while simultaneously meeting all stringent safety constraints. To tackle this issue, we propose a primal-based framework that orchestrates policy optimization between multi-objective learning and constraint adherence. Our method employs a novel natural policy gradient manipulation method to optimize multiple RL objectives and overcome conflicting gradients between different tasks, since the simple weighted average gradient direction may not be beneficial for specific tasks' performance due to misaligned gradients of different task objectives. When there is a violation of a hard constraint, our algorithm steps in to rectify the policy to minimize this violation. We establish theoretical convergence and constraint violation guarantees in a tabular setting. Empirically, our proposed method also outperforms prior state-of-the-art methods on challenging safe multi-objective reinforcement learning tasks.
5/28/2024
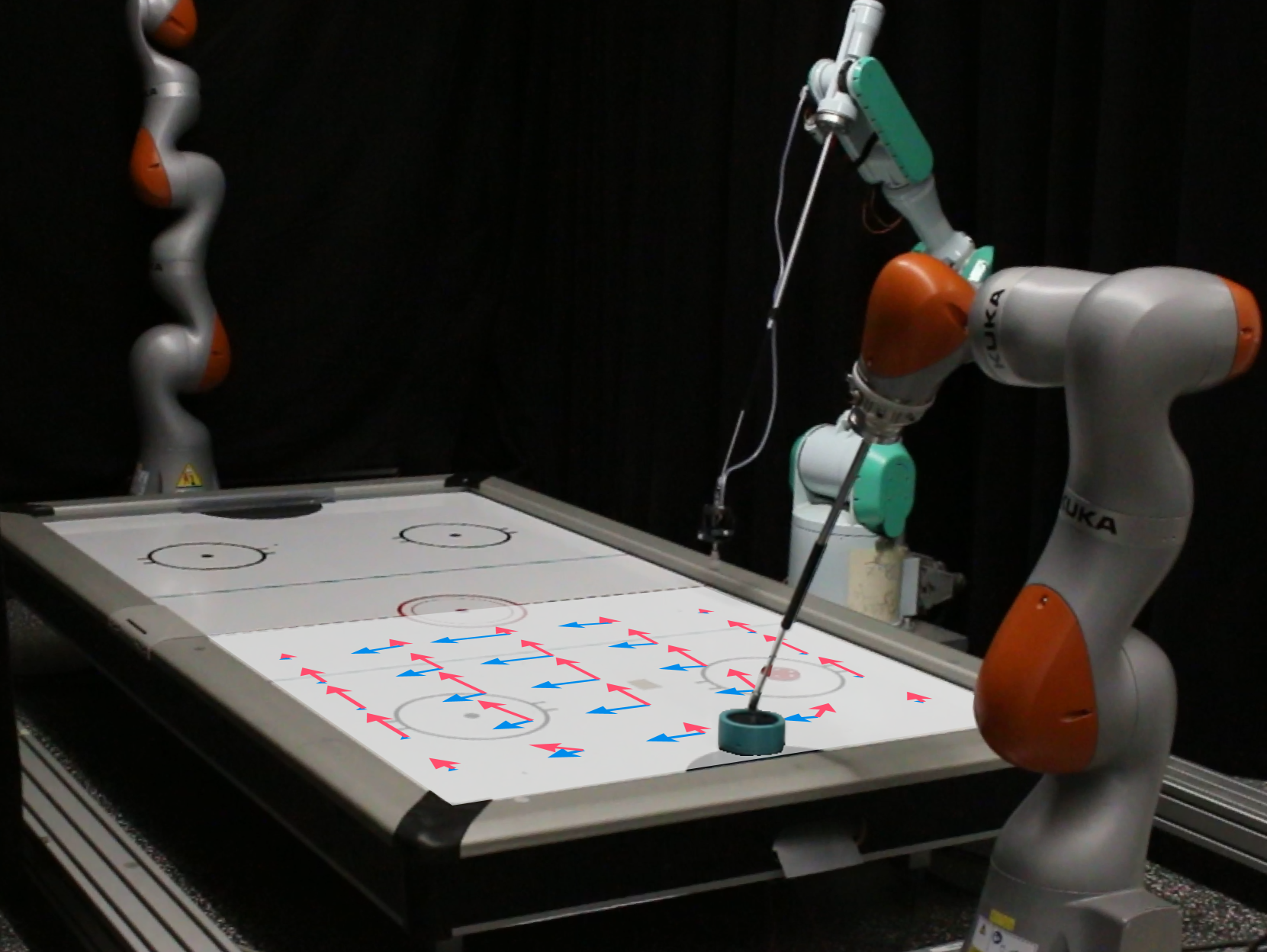
Safe Reinforcement Learning on the Constraint Manifold: Theory and Applications
Puze Liu, Haitham Bou-Ammar, Jan Peters, Davide Tateo
0
0
Integrating learning-based techniques, especially reinforcement learning, into robotics is promising for solving complex problems in unstructured environments. However, most existing approaches are trained in well-tuned simulators and subsequently deployed on real robots without online fine-tuning. In this setting, the simulation's realism seriously impacts the deployment's success rate. Instead, learning with real-world interaction data offers a promising alternative: not only eliminates the need for a fine-tuned simulator but also applies to a broader range of tasks where accurate modeling is unfeasible. One major problem for on-robot reinforcement learning is ensuring safety, as uncontrolled exploration can cause catastrophic damage to the robot or the environment. Indeed, safety specifications, often represented as constraints, can be complex and non-linear, making safety challenging to guarantee in learning systems. In this paper, we show how we can impose complex safety constraints on learning-based robotics systems in a principled manner, both from theoretical and practical points of view. Our approach is based on the concept of the Constraint Manifold, representing the set of safe robot configurations. Exploiting differential geometry techniques, i.e., the tangent space, we can construct a safe action space, allowing learning agents to sample arbitrary actions while ensuring safety. We demonstrate the method's effectiveness in a real-world Robot Air Hockey task, showing that our method can handle high-dimensional tasks with complex constraints. Videos of the real robot experiments are available on the project website (https://puzeliu.github.io/TRO-ATACOM).
4/16/2024