RING#: PR-by-PE Global Localization with Roto-translation Equivariant Gram Learning

0
🤯
Sign in to get full access
Overview
- This paper introduces a novel paradigm for global localization called "PR-by-PE" that leverages pose estimation to derive place recognition in a single model.
- The traditional approach treats place recognition and pose estimation as separate tasks, either handled by two independent models or jointly learned within a single model.
- The proposed PR-by-PE approach represents a departure from this traditional paradigm, aiming to improve the efficiency and accuracy of global localization.
Plain English Explanation
The paper discusses the challenge of global localization, which is the task of determining the precise location of an autonomous vehicle or mobile robot in the world. This is an essential capability for tasks like autonomous driving and robot navigation, especially in environments where GPS signals are unreliable or unavailable, such as indoor spaces or urban canyons.
Traditionally, global localization has been approached by breaking the problem into two separate tasks: place recognition and pose estimation. Place recognition involves identifying the specific location or "place" the robot is in, while pose estimation determines the robot's orientation and position within that place.
The paper introduces a new approach called "PR-by-PE" that combines these two tasks into a single model. Instead of treating them as separate steps, the PR-by-PE method uses the robot's pose estimation to help derive its place recognition. This represents a departure from the conventional "PR-then-PE" paradigm, where the two tasks are handled either by independent models or a single joint model.
The key idea behind PR-by-PE is to leverage the information gained from estimating the robot's pose to more efficiently and accurately recognize the specific place it is in. By integrating these two capabilities into a single framework, the authors aim to improve the overall performance and efficiency of global localization systems.
Technical Explanation
The paper presents a novel paradigm for global localization called "PR-by-PE" (Place Recognition by Pose Estimation), which departs from the traditional "PR-then-PE" approach.
In the PR-then-PE paradigm, place recognition and pose estimation are treated as separate, sequential tasks. This can be implemented either using two independent models (a.1) or a single joint model (a.2) that learns both capabilities.
The key innovation in this paper is the introduction of the PR-by-PE paradigm (b), where pose estimation is leveraged to derive place recognition in a single, integrated model. This represents a departure from the conventional approach, with the goal of improving the efficiency and accuracy of global localization.
The authors argue that by combining place recognition and pose estimation into a unified framework, the PR-by-PE approach can better exploit the synergies between these two tasks to enhance the overall performance of the global localization system. This contrasts with the PR-then-PE paradigm, where the tasks are handled either independently or in a partially-integrated manner.
Critical Analysis
The paper presents a novel and promising approach to global localization, but it is important to consider potential limitations and areas for further research.
One key caveat is the reliance on accurate pose estimation as a prerequisite for the PR-by-PE method. If the pose estimation component is not sufficiently robust or precise, this could negatively impact the overall performance of the system. The authors acknowledge this potential issue and suggest further research to address it.
Additionally, the paper does not provide a comprehensive comparison of the PR-by-PE approach against other state-of-the-art global localization methods. While the authors highlight the theoretical advantages of their paradigm, empirical evaluation on benchmark datasets would be necessary to fully assess its strengths and weaknesses compared to alternative approaches.
Another area for further exploration is the generalizability of the PR-by-PE method. The paper focuses on a specific global localization scenario, and it would be valuable to investigate how the approach could be adapted or extended to handle a broader range of environmental conditions and application domains.
Conclusion
This paper presents a novel paradigm for global localization called "PR-by-PE" that aims to improve the efficiency and accuracy of this fundamental task in autonomous systems. By integrating place recognition and pose estimation into a single, unified model, the authors propose a departure from the traditional PR-then-PE approach.
The key innovation of the PR-by-PE method is its ability to leverage pose estimation to derive place recognition, potentially enhancing the overall performance of the global localization system. While the paper outlines the theoretical advantages of this new paradigm, further empirical evaluation and exploration of its limitations and broader applicability would be valuable to fully assess its impact on the field.
Overall, the PR-by-PE approach represents an interesting and promising direction in the ongoing effort to develop robust and efficient global localization solutions for autonomous systems operating in complex, GPS-denied environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🤯
0
RING#: PR-by-PE Global Localization with Roto-translation Equivariant Gram Learning
Sha Lu, Xuecheng Xu, Yuxuan Wu, Haojian Lu, Xieyuanli Chen, Rong Xiong, Yue Wang
Global localization using onboard perception sensors, such as cameras and LiDARs, is crucial in autonomous driving and robotics applications when GPS signals are unreliable. Most approaches achieve global localization by sequential place recognition (PR) and pose estimation (PE). Some methods train separate models for each task, while others employ a single model with dual heads, trained jointly with separate task-specific losses. However, the accuracy of localization heavily depends on the success of place recognition, which often fails in scenarios with significant changes in viewpoint or environmental appearance. Consequently, this renders the final pose estimation of localization ineffective. To address this, we introduce a new paradigm, PR-by-PE localization, which bypasses the need for separate place recognition by directly deriving it from pose estimation. We propose RING#, an end-to-end PR-by-PE localization network that operates in the bird's-eye-view (BEV) space, compatible with both vision and LiDAR sensors. RING# incorporates a novel design that learns two equivariant representations from BEV features, enabling globally convergent and computationally efficient pose estimation. Comprehensive experiments on the NCLT and Oxford datasets show that RING# outperforms state-of-the-art methods in both vision and LiDAR modalities, validating the effectiveness of the proposed approach. The code will be publicly released.
Read more9/18/2024
0
BEVPlace++: Fast, Robust, and Lightweight LiDAR Global Localization for Unmanned Ground Vehicles
Lun Luo, Si-Yuan Cao, Xiaorui Li, Jintao Xu, Rui Ai, Zhu Yu, Xieyuanli Chen
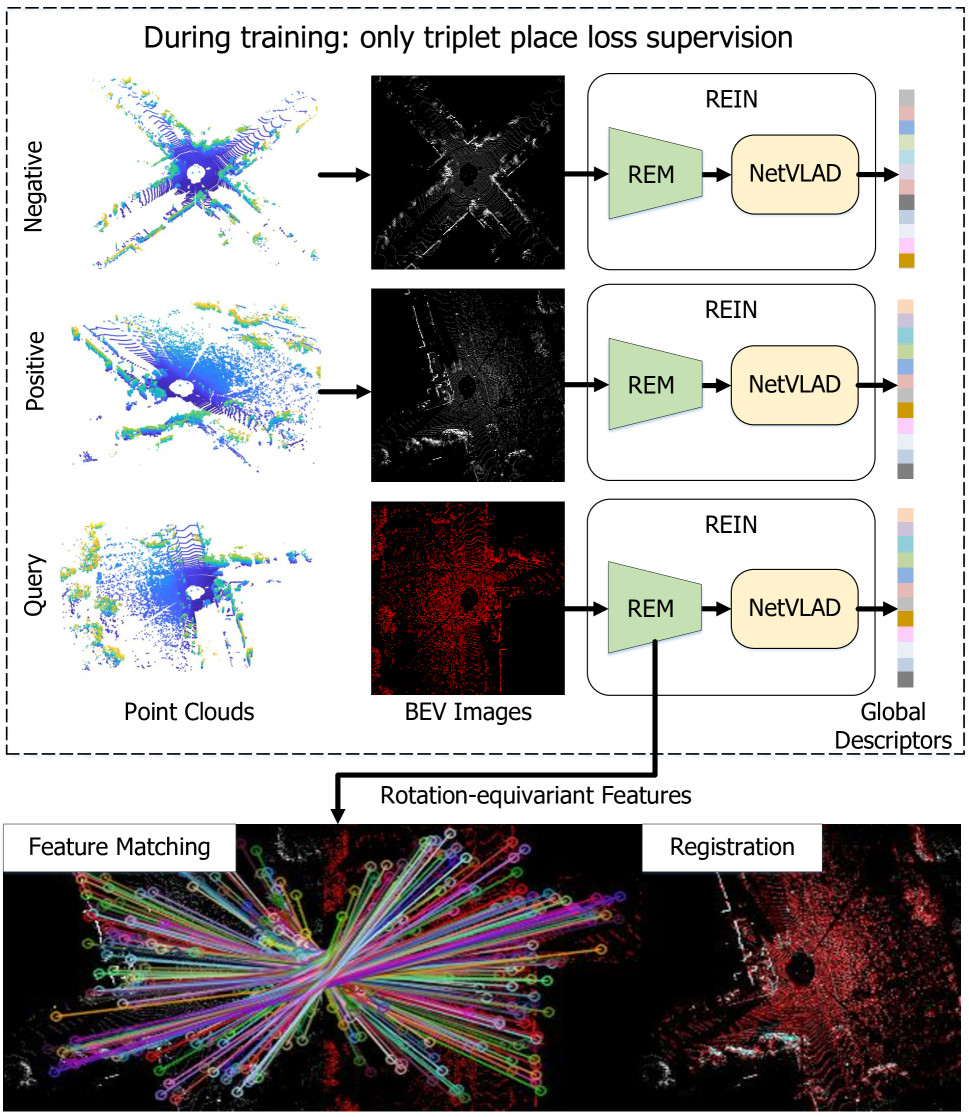
This article introduces BEVPlace++, a novel, fast, and robust LiDAR global localization method for unmanned ground vehicles. It uses lightweight convolutional neural networks (CNNs) on Bird's Eye View (BEV) image-like representations of LiDAR data to achieve accurate global localization through place recognition followed by 3-DoF pose estimation. Our detailed analyses reveal an interesting fact that CNNs are inherently effective at extracting distinctive features from LiDAR BEV images. Remarkably, keypoints of two BEV images with large translations can be effectively matched using CNN-extracted features. Building on this insight, we design a rotation equivariant module (REM) to obtain distinctive features while enhancing robustness to rotational changes. A Rotation Equivariant and Invariant Network (REIN) is then developed by cascading REM and a descriptor generator, NetVLAD, to sequentially generate rotation equivariant local features and rotation invariant global descriptors. The global descriptors are used first to achieve robust place recognition, and the local features are used for accurate pose estimation. Experimental results on multiple public datasets demonstrate that BEVPlace++, even when trained on a small dataset (3000 frames of KITTI) only with place labels, generalizes well to unseen environments, performs consistently across different days and years, and adapts to various types of LiDAR scanners. BEVPlace++ achieves state-of-the-art performance in subtasks of global localization including place recognition, loop closure detection, and global localization. Additionally, BEVPlace++ is lightweight, runs in real-time, and does not require accurate pose supervision, making it highly convenient for deployment. The source codes are publicly available at https://github.com/zjuluolun/BEVPlace.
Read more8/12/2024
👁️
0
General Place Recognition Survey: Towards Real-World Autonomy
Peng Yin, Jianhao Jiao, Shiqi Zhao, Lingyun Xu, Guoquan Huang, Howie Choset, Sebastian Scherer, Jianda Han
In the realm of robotics, the quest for achieving real-world autonomy, capable of executing large-scale and long-term operations, has positioned place recognition (PR) as a cornerstone technology. Despite the PR community's remarkable strides over the past two decades, garnering attention from fields like computer vision and robotics, the development of PR methods that sufficiently support real-world robotic systems remains a challenge. This paper aims to bridge this gap by highlighting the crucial role of PR within the framework of Simultaneous Localization and Mapping (SLAM) 2.0. This new phase in robotic navigation calls for scalable, adaptable, and efficient PR solutions by integrating advanced artificial intelligence (AI) technologies. For this goal, we provide a comprehensive review of the current state-of-the-art (SOTA) advancements in PR, alongside the remaining challenges, and underscore its broad applications in robotics. This paper begins with an exploration of PR's formulation and key research challenges. We extensively review literature, focusing on related methods on place representation and solutions to various PR challenges. Applications showcasing PR's potential in robotics, key PR datasets, and open-source libraries are discussed. We also emphasizes our open-source package, aimed at new development and benchmark for general PR. We conclude with a discussion on PR's future directions, accompanied by a summary of the literature covered and access to our open-source library, available to the robotics community at: https://github.com/MetaSLAM/GPRS.
Read more5/9/2024

0
Matched Filtering based LiDAR Place Recognition for Urban and Natural Environments
Therese Joseph, Tobias Fischer, Michael Milford
Place recognition is an important task within autonomous navigation, involving the re-identification of previously visited locations from an initial traverse. Unlike visual place recognition (VPR), LiDAR place recognition (LPR) is tolerant to changes in lighting, seasons, and textures, leading to high performance on benchmark datasets from structured urban environments. However, there is a growing need for methods that can operate in diverse environments with high performance and minimal training. In this paper, we propose a handcrafted matching strategy that performs roto-translation invariant place recognition and relative pose estimation for both urban and unstructured natural environments. Our approach constructs Birds Eye View (BEV) global descriptors and employs a two-stage search using matched filtering -- a signal processing technique for detecting known signals amidst noise. Extensive testing on the NCLT, Oxford Radar, and WildPlaces datasets consistently demonstrates state-of-the-art (SoTA) performance across place recognition and relative pose estimation metrics, with up to 15% higher recall than previous SoTA.
Read more9/9/2024