Towards End-to-End GPS Localization with Neural Pseudorange Correction

0
Sign in to get full access
Overview
- This paper presents a new approach for end-to-end GPS localization using neural networks to correct pseudoranges.
- The key idea is to train a neural network model to directly predict the user's location from raw GPS measurements, bypassing the traditional GPS processing pipeline.
- The authors demonstrate their approach on Android phones and show it can outperform traditional GPS processing in urban environments with blockages and multipath effects.
Plain English Explanation
The paper describes a new way to use deep learning to improve GPS localization on mobile devices like smartphones. Traditional GPS relies on a complex processing pipeline to convert raw satellite measurements into a position estimate. In contrast, the authors propose an "end-to-end" deep learning approach that directly predicts the user's location from the raw GPS data, bypassing the traditional steps.
The key innovation is a neural network model that is trained to "correct" the GPS pseudoranges - the measurements of the distance to each satellite. By learning to compensate for errors in these pseudoranges, often caused by obstacles like buildings blocking the satellite signals, the model can provide more accurate location estimates, especially in challenging urban environments.
The authors test their approach on Android phones and show it outperforms traditional GPS processing, particularly in areas with a lot of obstructions that degrade the GPS signal quality.
Technical Explanation
The paper introduces a new end-to-end GPS localization approach that uses a neural network to directly predict the user's location from raw GPS measurements, bypassing the traditional GPS processing pipeline.
The core of the approach is a neural network model that is trained to "correct" the GPS pseudoranges - the measurements of the distance to each satellite. By learning to compensate for errors in these pseudoranges, often caused by obstacles like buildings blocking the satellite signals, the model can provide more accurate location estimates.
The authors train and evaluate their approach using data collected on Android phones in both open and urban environments. They show their end-to-end approach can outperform traditional GPS processing, particularly in challenging urban areas with obstructions that degrade the GPS signal.
Critical Analysis
The paper presents a promising new direction for improving GPS localization, especially in difficult environments like cities. By using deep learning to directly correct the raw GPS measurements, the approach can potentially bypass many of the limitations of the traditional GPS processing pipeline.
However, the authors acknowledge several limitations and areas for further research. First, the training and evaluation was done on a relatively small dataset, so more extensive testing would be needed to fully validate the approach. Second, the neural network model was relatively simple, and more sophisticated architectures or training techniques may further improve performance.
Additionally, the authors do not address potential issues around real-world deployment, such as how the model would handle firmware updates to the GPS chipsets or changes in the satellite constellation over time. Careful consideration of these practical challenges would be important for transitioning the approach to production systems.
Overall, the paper demonstrates an innovative use of deep learning for GPS localization and suggests exciting possibilities for further research and development in this area.
Conclusion
This paper presents a novel end-to-end approach for improving GPS localization using deep learning to directly correct the raw GPS measurements. By training a neural network model to compensate for errors in the pseudoranges, the authors show their approach can outperform traditional GPS processing, especially in challenging urban environments.
While the work has some limitations and practical deployment challenges to address, it represents an intriguing step forward in using data-driven techniques to enhance GPS-based positioning. As smartphones and other mobile devices continue to play an increasingly important role in our lives, innovations like this may help unlock new capabilities and use cases that rely on accurate and reliable location information.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Towards End-to-End GPS Localization with Neural Pseudorange Correction
Xu Weng, KV Ling, Haochen Liu, Kun Cao
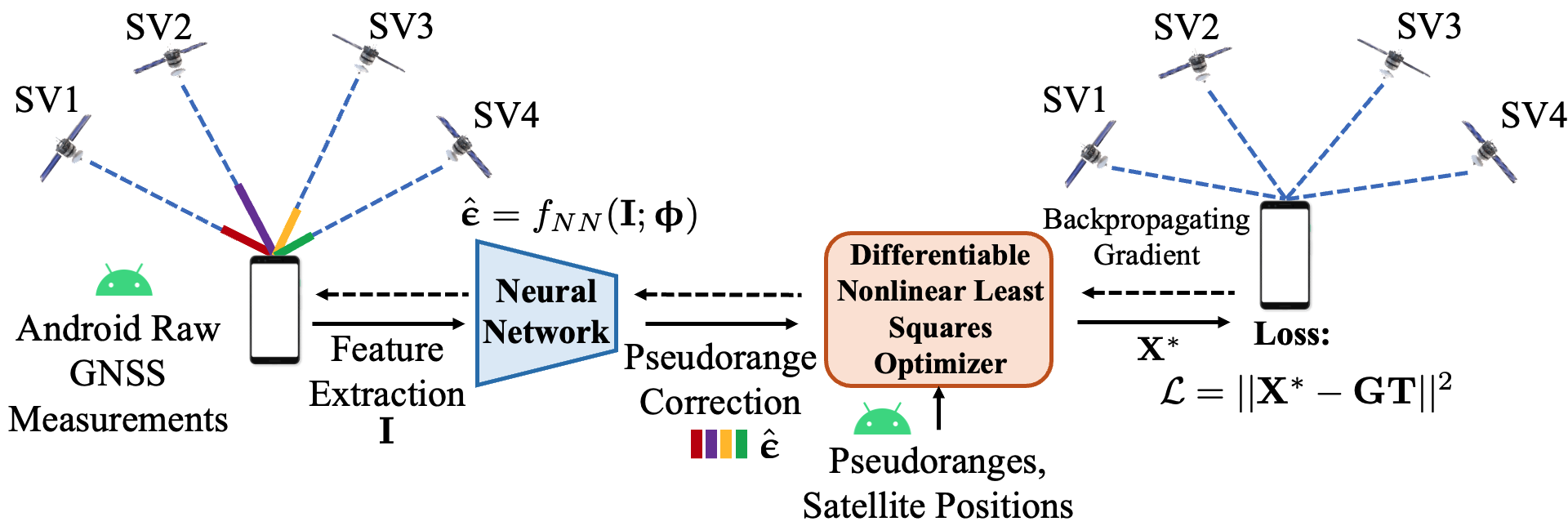
The pseudorange error is one of the root causes of localization inaccuracy in GPS. Previous data-driven methods regress and eliminate pseudorange errors using handcrafted intermediate labels. Unlike them, we propose an end-to-end GPS localization framework, E2E-PrNet, to train a neural network for pseudorange correction (PrNet) directly using the final task loss calculated with the ground truth of GPS receiver states. The gradients of the loss with respect to learnable parameters are backpropagated through a Differentiable Nonlinear Least Squares (DNLS) optimizer to PrNet. The feasibility of fusing the data-driven neural network and the model-based DNLS module is verified with GPS data collected by Android phones, showing that E2E-PrNet outperforms the baseline weighted least squares method and the state-of-the-art end-to-end data-driven approach. Finally, we discuss the explainability of E2E-PrNet.
Read more8/22/2024
🤯
0
RING#: PR-by-PE Global Localization with Roto-translation Equivariant Gram Learning
Sha Lu, Xuecheng Xu, Yuxuan Wu, Haojian Lu, Xieyuanli Chen, Rong Xiong, Yue Wang
Global localization using onboard perception sensors, such as cameras and LiDARs, is crucial in autonomous driving and robotics applications when GPS signals are unreliable. Most approaches achieve global localization by sequential place recognition (PR) and pose estimation (PE). Some methods train separate models for each task, while others employ a single model with dual heads, trained jointly with separate task-specific losses. However, the accuracy of localization heavily depends on the success of place recognition, which often fails in scenarios with significant changes in viewpoint or environmental appearance. Consequently, this renders the final pose estimation of localization ineffective. To address this, we introduce a new paradigm, PR-by-PE localization, which bypasses the need for separate place recognition by directly deriving it from pose estimation. We propose RING#, an end-to-end PR-by-PE localization network that operates in the bird's-eye-view (BEV) space, compatible with both vision and LiDAR sensors. RING# incorporates a novel design that learns two equivariant representations from BEV features, enabling globally convergent and computationally efficient pose estimation. Comprehensive experiments on the NCLT and Oxford datasets show that RING# outperforms state-of-the-art methods in both vision and LiDAR modalities, validating the effectiveness of the proposed approach. The code will be publicly released.
Read more9/18/2024

0
Data-Driven Target Localization: Benchmarking Gradient Descent Using the Cramer-Rao Bound
Shyam Venkatasubramanian, Sandeep Gogineni, Bosung Kang, Muralidhar Rangaswamy
In modern radar systems, precise target localization using azimuth and velocity estimation is paramount. Traditional unbiased estimation methods have utilized gradient descent algorithms to reach the theoretical limits of the Cramer Rao Bound (CRB) for the error of the parameter estimates. As an extension, we demonstrate on a realistic simulated example scenario that our earlier presented data-driven neural network model outperforms these traditional methods, yielding improved accuracies in target azimuth and velocity estimation. We emphasize, however, that this improvement does not imply that the neural network outperforms the CRB itself. Rather, the enhanced performance is attributed to the biased nature of the neural network approach. Our findings underscore the potential of employing deep learning methods in radar systems to achieve more accurate localization in cluttered and dynamic environments.
Read more4/24/2024

0
DDPG-E2E: A Novel Policy Gradient Approach for End-to-End Communication Systems
Bolun Zhang, Nguyen Van Huynh, Dinh Thai Hoang, Diep N. Nguyen, Quoc-Viet Pham
The End-to-end (E2E) learning-based approach has great potential to reshape the existing communication systems by replacing the transceivers with deep neural networks. To this end, the E2E learning approach needs to assume the availability of prior channel information to mathematically formulate a differentiable channel layer for the backpropagation (BP) of the error gradients, thereby jointly optimizing the transmitter and the receiver. However, accurate and instantaneous channel state information is hardly obtained in practical wireless communication scenarios. Moreover, the existing E2E learning-based solutions exhibit limited performance in data transmissions with large block lengths. In this article, these practical issues are addressed by our proposed deep deterministic policy gradient-based E2E communication system. In particular, the proposed solution utilizes a reward feedback mechanism to train both the transmitter and the receiver, which alleviates the information loss of error gradients during BP. In addition, a convolutional neural network (CNN)-based architecture is developed to mitigate the curse of dimensionality problem when transmitting messages with large block lengths. Extensive simulations then demonstrate that our proposed solution can not only jointly train the transmitter and the receiver simultaneously without requiring the prior channel knowledge but also can obtain significant performance improvement on block error rate compared to state-of-the-art solutions.
Read more4/10/2024