RoboHop: Segment-based Topological Map Representation for Open-World Visual Navigation

0
Sign in to get full access
Overview
- This paper introduces RoboHop, a new approach for representing topological maps for open-world visual navigation.
- The key idea is to use a segment-based representation that captures high-level semantic information about the environment, rather than relying solely on low-level geometric data.
- This allows the robot to better understand the structure and affordances of the environment, leading to more efficient and robust navigation.
Plain English Explanation
RoboHop is a new way for robots to understand and navigate through complex environments, like homes or offices. Instead of just focusing on the physical layout and geometry of the space, RoboHop also considers the higher-level meaning and function of different areas.
For example, a robot using RoboHop would be able to recognize that a room is a kitchen, with counters, appliances, and storage for food. It wouldn't just see a collection of walls, floors, and furniture. This semantic understanding helps the robot make more intelligent decisions about how to move through the environment and accomplish tasks.
Rather than relying solely on detailed 3D maps, RoboHop uses a more abstract, segment-based representation. This makes the maps more compact and flexible, so the robot can adapt to changes in the environment more easily. It also allows the robot to reason about the environment in higher-level, human-like terms, rather than just low-level geometry.
By combining this semantic understanding with efficient navigation algorithms, RoboHop aims to enable robots to operate more robustly and intelligently in open-world scenarios, like navigating a home or office, where the environment is complex and can change over time. This could have important applications for home robots, assistive technologies, and other real-world robotics systems.
Technical Explanation
RoboHop's key innovation is its use of a segment-based topological map representation, which captures high-level semantic information about the environment, rather than relying solely on geometric data. The map is divided into distinct segments, each of which corresponds to a semantically meaningful region, such as a room, corridor, or doorway.
Each segment is described not just by its physical boundaries, but also by its functional properties and affordances. For example, a kitchen segment might be characterized by the presence of appliances, countertops, and storage areas, rather than just the arrangement of walls and furniture.
This semantic understanding allows the robot to reason about the environment in more human-like terms, and make more intelligent decisions about navigation and task planning. The topological nature of the map also makes it more compact and flexible than a traditional geometric representation, enabling efficient path planning and adaptation to changes in the environment.
The paper describes the process of constructing the RoboHop map, including segmentation, semantic labeling, and topological graph construction. It also presents a novel navigation algorithm that leverages the semantic and topological information to guide the robot through the environment.
Experiments in both simulated and real-world environments demonstrate the advantages of RoboHop over other state-of-the-art mapping and navigation approaches, in terms of efficiency, robustness, and generalization to novel environments.
Critical Analysis
The RoboHop approach represents an important step forward in the field of open-world visual navigation, by incorporating higher-level semantic understanding into the robot's environmental representation. This has significant potential benefits in terms of enabling more intelligent and adaptive robot behaviors.
However, the paper also acknowledges several limitations and areas for further research. For example, the current implementation relies on pre-defined semantic categories and functional properties, which may not fully capture the nuanced ways that humans understand and interact with their environments. Extending the system to learn and adapt these semantic representations in a more flexible, data-driven manner could be an important area for future work.
Additionally, while the experiments demonstrate the advantages of RoboHop in controlled settings, it will be important to further validate the approach in more complex, real-world environments with dynamic changes and uncertainty. Addressing issues like partial observability, long-term map persistence, and integration with other robot perception and control systems will be crucial for transitioning the technology to practical applications.
Overall, the RoboHop work represents a promising direction in the quest to endow robots with more human-like spatial understanding and navigation capabilities. By bridging the gap between low-level geometric representations and high-level semantic knowledge, it lays the groundwork for more intelligent, adaptive, and user-friendly robotic systems. Continued research and development in this area could have far-reaching implications for a wide range of robotics applications, from domestic assistants to autonomous vehicles.
Conclusion
The RoboHop paper introduces a novel approach for representing topological maps that capture high-level semantic information about the environment, going beyond traditional geometric representations. By modeling the environment in terms of semantically-meaningful segments and their functional properties, RoboHop enables robots to reason about the world in more human-like ways, leading to more efficient and robust navigation.
This work represents an important step forward in the field of open-world visual navigation, with potential applications in domestic robotics, assistive technologies, and autonomous systems. While the current implementation has some limitations, the underlying ideas and insights could inspire further advancements in the integration of semantic understanding and topological mapping for real-world robotics applications.
As the field of robotics continues to evolve, approaches like RoboHop that bridge the gap between low-level sensor data and high-level cognitive representations will become increasingly crucial for enabling robots to operate intelligently and flexibly in complex, dynamic environments. The continued development of these techniques could have far-reaching impacts on the way we interact with and rely on robotic systems in our everyday lives.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
RoboHop: Segment-based Topological Map Representation for Open-World Visual Navigation
Sourav Garg, Krishan Rana, Mehdi Hosseinzadeh, Lachlan Mares, Niko Sunderhauf, Feras Dayoub, Ian Reid
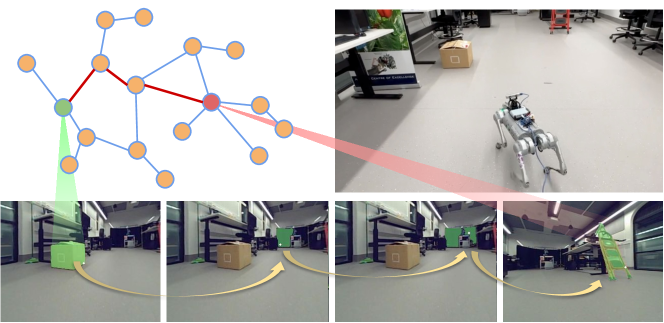
Mapping is crucial for spatial reasoning, planning and robot navigation. Existing approaches range from metric, which require precise geometry-based optimization, to purely topological, where image-as-node based graphs lack explicit object-level reasoning and interconnectivity. In this paper, we propose a novel topological representation of an environment based on image segments, which are semantically meaningful and open-vocabulary queryable, conferring several advantages over previous works based on pixel-level features. Unlike 3D scene graphs, we create a purely topological graph with segments as nodes, where edges are formed by a) associating segment-level descriptors between pairs of consecutive images and b) connecting neighboring segments within an image using their pixel centroids. This unveils a continuous sense of a place, defined by inter-image persistence of segments along with their intra-image neighbours. It further enables us to represent and update segment-level descriptors through neighborhood aggregation using graph convolution layers, which improves robot localization based on segment-level retrieval. Using real-world data, we show how our proposed map representation can be used to i) generate navigation plans in the form of hops over segments and ii) search for target objects using natural language queries describing spatial relations of objects. Furthermore, we quantitatively analyze data association at the segment level, which underpins inter-image connectivity during mapping and segment-level localization when revisiting the same place. Finally, we show preliminary trials on segment-level `hopping' based zero-shot real-world navigation. Project page with supplementary details: oravus.github.io/RoboHop/
Read more5/10/2024

0
Robotic Exploration through Semantic Topometric Mapping
Scott Fredriksson, Akshit Saradagi, George Nikolakopoulos
In this article, we introduce a novel strategy for robotic exploration in unknown environments using a semantic topometric map. As it will be presented, the semantic topometric map is generated by segmenting the grid map of the currently explored parts of the environment into regions, such as intersections, pathways, dead-ends, and unexplored frontiers, which constitute the structural semantics of an environment. The proposed exploration strategy leverages metric information of the frontier, such as distance and angle to the frontier, similar to existing frameworks, with the key difference being the additional utilization of structural semantic information, such as properties of the intersections leading to frontiers. The algorithm for generating semantic topometric mapping utilized by the proposed method is lightweight, resulting in the method's online execution being both rapid and computationally efficient. Moreover, the proposed framework can be applied to both structured and unstructured indoor and outdoor environments, which enhances the versatility of the proposed exploration algorithm. We validate our exploration strategy and demonstrate the utility of structural semantics in exploration in two complex indoor environments by utilizing a Turtlebot3 as the robotic agent. Compared to traditional frontier-based methods, our findings indicate that the proposed approach leads to faster exploration and requires less computation time.
Read more6/27/2024
0
Mapping High-level Semantic Regions in Indoor Environments without Object Recognition
Roberto Bigazzi, Lorenzo Baraldi, Shreyas Kousik, Rita Cucchiara, Marco Pavone
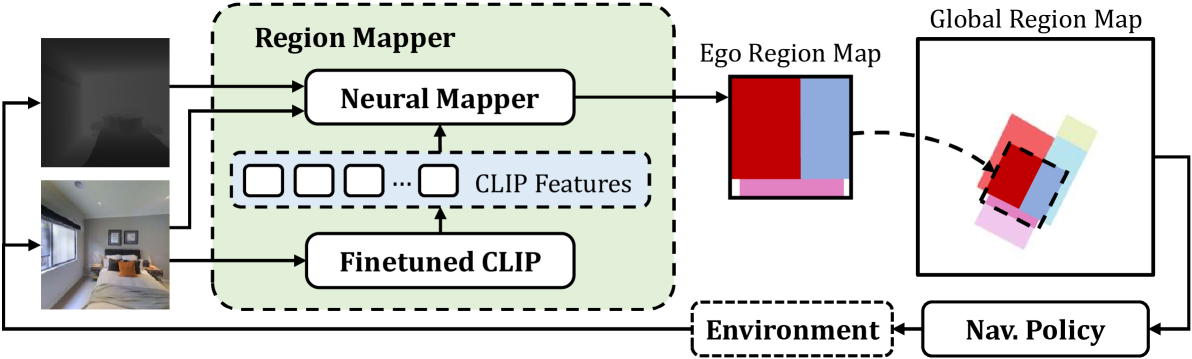
Robots require a semantic understanding of their surroundings to operate in an efficient and explainable way in human environments. In the literature, there has been an extensive focus on object labeling and exhaustive scene graph generation; less effort has been focused on the task of purely identifying and mapping large semantic regions. The present work proposes a method for semantic region mapping via embodied navigation in indoor environments, generating a high-level representation of the knowledge of the agent. To enable region identification, the method uses a vision-to-language model to provide scene information for mapping. By projecting egocentric scene understanding into the global frame, the proposed method generates a semantic map as a distribution over possible region labels at each location. This mapping procedure is paired with a trained navigation policy to enable autonomous map generation. The proposed method significantly outperforms a variety of baselines, including an object-based system and a pretrained scene classifier, in experiments in a photorealistic simulator.
Read more4/16/2024

0
QueSTMaps: Queryable Semantic Topological Maps for 3D Scene Understanding
Yash Mehan, Kumaraditya Gupta, Rohit Jayanti, Anirudh Govil, Sourav Garg, Madhava Krishna
Understanding the structural organisation of 3D indoor scenes in terms of rooms is often accomplished via floorplan extraction. Robotic tasks such as planning and navigation require a semantic understanding of the scene as well. This is typically achieved via object-level semantic segmentation. However, such methods struggle to segment out topological regions like kitchen in the scene. In this work, we introduce a two-step pipeline. First, we extract a topological map, i.e., floorplan of the indoor scene using a novel multi-channel occupancy representation. Then, we generate CLIP-aligned features and semantic labels for every room instance based on the objects it contains using a self-attention transformer. Our language-topology alignment supports natural language querying, e.g., a place to cook locates the kitchen. We outperform the current state-of-the-art on room segmentation by ~20% and room classification by ~12%. Our detailed qualitative analysis and ablation studies provide insights into the problem of joint structural and semantic 3D scene understanding.
Read more4/10/2024