Robot Safety Monitoring using Programmable Light Curtains

0

Sign in to get full access
Overview
- This paper presents a system for using programmable light curtains to monitor the safety of robot operations.
- Light curtains are devices that can detect when something passes through them, allowing for the monitoring of a defined safety zone around a robot.
- The authors developed a programmable light curtain system that can be customized to different robot workspaces and used to trigger safety actions when a person or object enters the robot's operating area.
Plain English Explanation
The paper describes a safety monitoring system for robots that uses light curtains. Light curtains are devices that can detect when something passes through them, creating an invisible "curtain" of light. The researchers created a programmable light curtain system that can be customized to different robot workspaces. This allows the light curtains to be set up around a robot's operating area to monitor for any intrusions that could put people in danger.
Imagine you have a robot arm working in a factory. You wouldn't want people wandering too close while it's operating, as they could get struck or caught by the fast-moving arm. The programmable light curtain system the researchers developed can be positioned around the robot's workspace to create a virtual safety zone. If anything passes through the light curtain, the system can automatically trigger the robot to stop or slow down, protecting nearby workers. This provides an extra layer of safety beyond just relying on the robot's own sensors and programming.
The key innovation is the ability to customize the light curtain setup for different robot workspaces. This means the safety system can be tailored to the specific layout and operations of each robot, rather than using a one-size-fits-all approach. This flexibility is important, as robot workspaces can vary greatly in size, shape, and the complexity of the tasks being performed. The programmable light curtains allow the safety monitoring to be adapted accordingly.
Technical Explanation
The paper describes the development and evaluation of a programmable light curtain system for robot safety monitoring. Light curtains are optoelectronic devices that can detect when an object passes through a plane of light, creating a virtual barrier. The researchers created a programmable light curtain system that can be customized to different robot workspaces.
The system consists of multiple light curtain modules that can be positioned and configured around a robot's operating area. Each module contains a light emitter and receiver that project an invisible plane of light. When this light plane is interrupted, the system can trigger safety actions like stopping the robot. The researchers developed software to allow the light curtain setup to be easily customized for different robot workspaces.
To evaluate the system, the authors conducted experiments in a laboratory setting, testing the light curtains' ability to reliably detect intrusions and trigger appropriate safety responses. They also explored techniques for optimizing the light curtain configuration to minimize false triggers while ensuring comprehensive safety coverage around the robot.
The results demonstrated the effectiveness of the programmable light curtain system in monitoring robot workspaces and triggering timely safety actions. The customizability of the system was a key advantage, allowing the light curtain setup to be tailored to the specific requirements of different robot applications.
Critical Analysis
The paper provides a thorough technical description of the programmable light curtain system and its evaluation. The researchers have clearly put a lot of thought into the design and implementation of the safety monitoring solution.
One potential limitation is that the experiments were conducted in a controlled laboratory setting, rather than a real-world industrial environment. While this allows for more precise evaluation of the system's capabilities, it doesn't fully capture the challenges that may arise from factors like environmental conditions, robot motion patterns, and workspace clutter in a production facility. Further testing in more realistic scenarios would help validate the system's robustness and identify any potential edge cases.
Additionally, the paper does not delve into the cost implications of deploying the programmable light curtain system. Factors like the pricing of the hardware components, installation complexity, and maintenance requirements could impact the system's accessibility and adoption by smaller companies or those with limited budgets.
While the authors mention the customizability of the light curtain setup as a key benefit, they don't provide much detail on the user experience or programming interface. Ensuring the configuration process is intuitive and efficient for robot operators and safety engineers will be crucial for the practical implementation of the system.
Overall, the researchers have presented a promising approach to enhancing robot safety through the use of programmable light curtains. Further exploration of real-world deployment scenarios and a deeper examination of the system's cost-effectiveness and usability would help strengthen the case for its broader adoption in industrial settings.
Conclusion
This paper introduces a programmable light curtain system for monitoring the safety of robot operations. The researchers have developed a customizable solution that allows light curtains to be configured around a robot's workspace, creating a virtual safety zone. When the light curtains detect an intrusion, the system can trigger appropriate safety actions, such as stopping or slowing the robot, to protect nearby personnel.
The key innovation is the ability to tailor the light curtain setup to the specific requirements of different robot applications. This adaptability is crucial, as robot workspaces can vary greatly in size, shape, and the complexity of the tasks being performed. By enabling this customization, the researchers have created a safety monitoring system that can be effectively integrated into a wide range of industrial robot deployments.
The paper provides a thorough technical evaluation of the programmable light curtain system, demonstrating its reliability in detecting intrusions and triggering timely safety responses. While the experiments were conducted in a controlled laboratory setting, further testing in real-world industrial environments would help validate the system's robustness and identify any practical challenges.
Overall, this research represents an important contribution to the field of robot safety, addressing a critical need for enhanced monitoring and protection measures. By leveraging programmable light curtains, the researchers have developed a flexible and effective solution that has the potential to improve the safety of human-robot interactions in industrial settings.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Robot Safety Monitoring using Programmable Light Curtains
Karnik Ram, Shobhit Aggarwal, Robert Tamburo, Siddharth Ancha, Srinivasa Narasimhan
As factories continue to evolve into collaborative spaces with multiple robots working together with human supervisors in the loop, ensuring safety for all actors involved becomes critical. Currently, laser-based light curtain sensors are widely used in factories for safety monitoring. While these conventional safety sensors meet high accuracy standards, they are difficult to reconfigure and can only monitor a fixed user-defined region of space. Furthermore, they are typically expensive. Instead, we leverage a controllable depth sensor, programmable light curtains (PLC), to develop an inexpensive and flexible real-time safety monitoring system for collaborative robot workspaces. Our system projects virtual dynamic safety envelopes that tightly envelop the moving robot at all times and detect any objects that intrude the envelope. Furthermore, we develop an instrumentation algorithm that optimally places (multiple) PLCs in a workspace to maximize the visibility coverage of robots. Our work enables fence-less human-robot collaboration, while scaling to monitor multiple robots with few sensors. We analyze our system in a real manufacturing testbed with four robot arms and demonstrate its capabilities as a fast, accurate, and inexpensive safety monitoring solution.
Read more4/5/2024

0
Collaborating for Success: Optimizing System Efficiency and Resilience Under Agile Industrial Settings
Sunny Katyara, Suchita Sharma, Praveen Damacharla, Carlos Garcia Santiago, Francis O'Farrell, Philip Long
Designing an efficient and resilient human-robot collaboration strategy that not only upholds the safety and ergonomics of shared workspace but also enhances the performance and agility of collaborative setup presents significant challenges concerning environment perception and robot control. In this research, we introduce a novel approach for collaborative environment monitoring and robot motion regulation to address this multifaceted problem. Our study proposes novel computation and division of safety monitoring zones, adhering to ISO 13855 and TS 15066 standards, utilizing 2D lasers information. These zones are not only configured in the standard three-layer arrangement but are also expanded into two adjacent quadrants, thereby enhancing system uptime and preventing unnecessary deadlocks. Moreover, we also leverage 3D visual information to track dynamic human articulations and extended intrusions. Drawing upon the fused sensory data from 2D and 3D perceptual spaces, our proposed hierarchical controller stably regulates robot velocity, validated using Lasalle in-variance principle. Empirical evaluations demonstrate that our approach significantly reduces task execution time and system response delay, resulting in improved efficiency and resilience within collaborative settings.
Read more9/14/2024
0
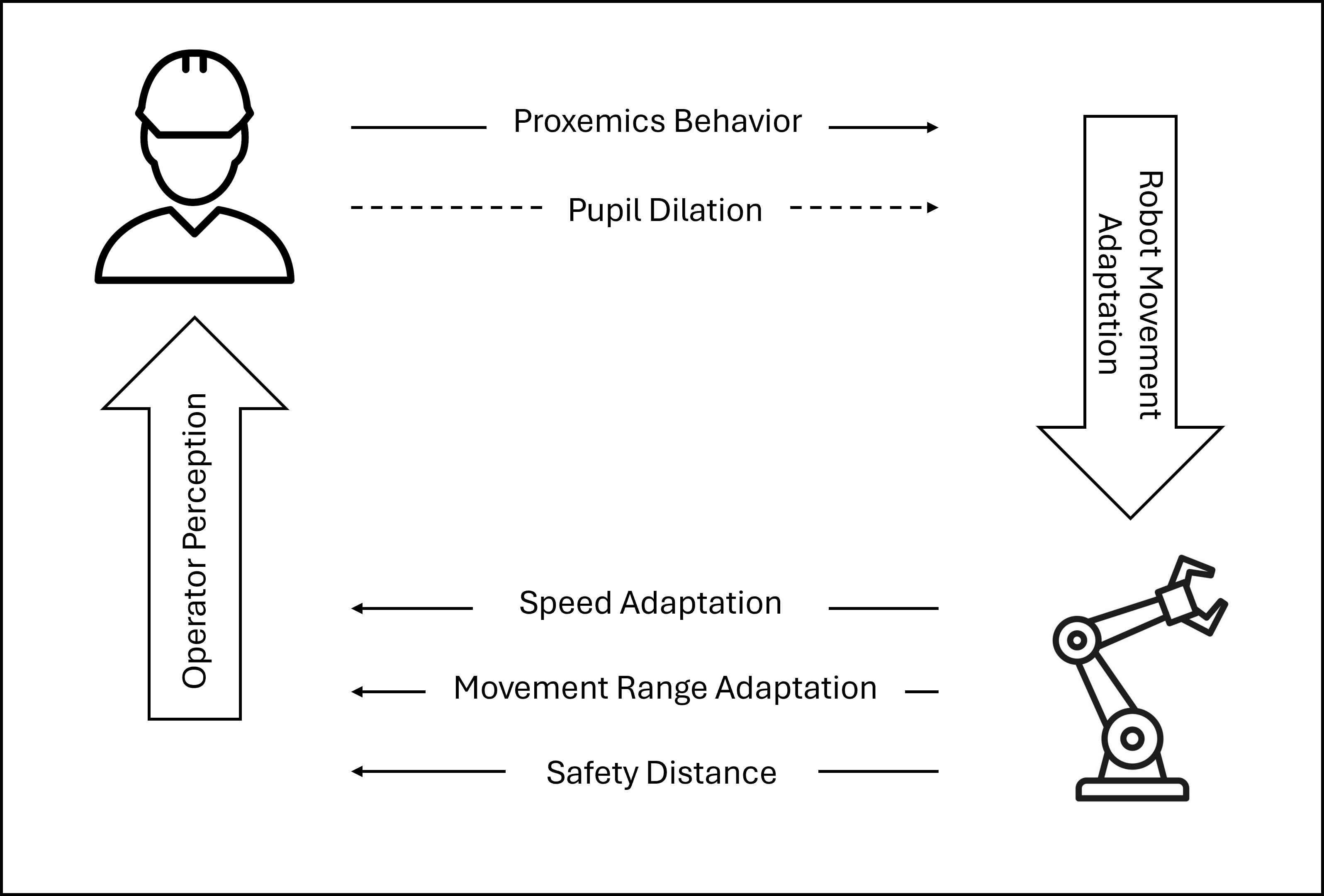
New!Real-Time Adaptive Industrial Robots: Improving Safety And Comfort In Human-Robot Collaboration
Damian Hostettler, Simon Mayer, Jan Liam Albert, Kay Erik Jenss, Christian Hildebrand
Industrial robots become increasingly prevalent, resulting in a growing need for intuitive, comforting human-robot collaboration. We present a user-aware robotic system that adapts to operator behavior in real time while non-intrusively monitoring physiological signals to create a more responsive and empathetic environment. Our prototype dynamically adjusts robot speed and movement patterns while measuring operator pupil dilation and proximity. Our user study compares this adaptive system to a non-adaptive counterpart, and demonstrates that the adaptive system significantly reduces both perceived and physiologically measured cognitive load while enhancing usability. Participants reported increased feelings of comfort, safety, trust, and a stronger sense of collaboration when working with the adaptive robot. This highlights the potential of integrating real-time physiological data into human-robot interaction paradigms. This novel approach creates more intuitive and collaborative industrial environments where robots effectively 'read' and respond to human cognitive states, and we feature all data and code for future use.
Read more9/17/2024

0
Robotic deployment on construction sites: considerations for safety and productivity impact
Rafael Gomes Braga, Muhammad Owais Tahir, Ivanka Iordanova, David St-Onge
Deploying mobile robots in construction sites to collaborate with workers or perform automated tasks such as surveillance and inspections carries the potential to greatly increase productivity, reduce human errors, and save costs. However ensuring human safety is a major concern, and the rough and dynamic construction environments pose multiple challenges for robot deployment. In this paper, we present the insights we obtained from our collaborations with construction companies in Canada and discuss our experiences deploying a semi-autonomous mobile robot in real construction scenarios.
Read more5/14/2024