Robotic-CLIP: Fine-tuning CLIP on Action Data for Robotic Applications

0

Sign in to get full access
Overview
- Robotic-CLIP is a research paper that explores fine-tuning the CLIP model, a popular vision-language model, on action data for robotic applications.
- The key idea is to leverage CLIP's powerful visual and language understanding capabilities to improve robot perception and control for real-world tasks.
- The paper describes the process of fine-tuning CLIP, evaluates its performance on various robotic benchmarks, and analyzes the benefits and limitations of this approach.
Plain English Explanation
Robotic-CLIP: Fine-tuning CLIP on Action Data for Robotic Applications is a research paper that looks at using a powerful AI model called CLIP to help robots better understand and interact with the world around them.
CLIP is a machine learning model that has been trained on a huge amount of image and text data, allowing it to recognize objects, understand language, and make connections between visual and textual information. The researchers in this paper wondered if they could fine-tune (or adapt) CLIP to work specifically for robotic applications, where the goal is for robots to be able to perceive their environment, interpret commands, and carry out actions.
To do this, the researchers took the pre-trained CLIP model and continued training it using a dataset of actions and task-related information. This helps the model learn the specific visual cues and language concepts that are relevant for robotics. The paper then evaluates how well this "Robotic-CLIP" model performs on various benchmarks, like helping a robot arm manipulate objects or interpreting natural language instructions.
The key insight is that by leveraging the powerful capabilities of CLIP, the researchers were able to create a more capable and adaptable robotic system, one that can better understand the world around it and carry out complex tasks. This could have important implications for the development of more versatile and intelligent robots that can assist humans in a wide range of applications.
Technical Explanation
The paper proposes a novel approach called "Robotic-CLIP" that fine-tunes the CLIP model, a state-of-the-art vision-language model, on action data to improve its performance on robotic tasks.
The researchers start by pre-training CLIP on a large-scale image-text dataset, which imbues the model with strong visual and linguistic understanding. They then fine-tune this pre-trained CLIP model on a dataset of action-oriented visual and textual data, such as images of robotic manipulations paired with descriptions of the actions being performed.
This fine-tuning process allows the Robotic-CLIP model to learn the visual cues and language concepts that are most relevant for robotic applications, such as object affordances, task semantics, and action dynamics. The researchers evaluate Robotic-CLIP on a variety of robotic benchmarks, including object manipulation, instruction following, and language-conditioned control tasks.
The results show that Robotic-CLIP outperforms both the original pre-trained CLIP model as well as other specialized robotic perception and control models. The authors attribute this performance boost to Robotic-CLIP's ability to leverage CLIP's general-purpose visual and linguistic understanding while also adapting it to the specific needs of robotic applications.
Critical Analysis
The Robotic-CLIP paper presents a promising approach for enhancing robot perception and control capabilities by fine-tuning the CLIP model on action data. However, the paper also acknowledges several limitations and areas for further research.
One key limitation is the reliance on curated datasets of robotic actions and language descriptions, which may not fully capture the complexity and diversity of real-world robotic tasks. The researchers suggest exploring ways to expand the training data, such as by incorporating additional sources of action-oriented information or using unsupervised learning techniques.
Additionally, the paper focuses primarily on evaluating Robotic-CLIP on benchmark tasks, but does not provide in-depth analysis of its performance in more realistic, unstructured environments. Further research is needed to understand how Robotic-CLIP would fare in complex, dynamic robotic scenarios with noisy sensor data and ambiguous language inputs.
Another area for improvement is the interpretability and explainability of the Robotic-CLIP model. While the paper demonstrates the model's strong performance, it does not provide much insight into the internal representations and decision-making processes that lead to this performance. Incorporating more explicit mechanisms for model interpretability could help researchers and practitioners better understand the model's strengths, weaknesses, and failure modes.
Despite these limitations, the Robotic-CLIP approach represents an important step forward in leveraging powerful vision-language models for robotic applications. Continued research in this direction could lead to more versatile and adaptable robotic systems that can better understand and interact with the world around them.
Conclusion
The Robotic-CLIP paper presents a novel approach for fine-tuning the CLIP model, a state-of-the-art vision-language model, on action data to improve its performance on a variety of robotic tasks.
By adapting CLIP's general-purpose visual and linguistic understanding to the specific needs of robotics, the researchers were able to create a more capable and adaptable model, Robotic-CLIP, that outperformed both the original CLIP model and other specialized robotic perception and control models.
This work has important implications for the development of more intelligent and versatile robots that can better understand and interact with the world around them. While the paper acknowledges some limitations and areas for further research, the Robotic-CLIP approach represents a promising step forward in leveraging powerful AI models to enhance robotic capabilities.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Robotic-CLIP: Fine-tuning CLIP on Action Data for Robotic Applications
Nghia Nguyen, Minh Nhat Vu, Tung D. Ta, Baoru Huang, Thieu Vo, Ngan Le, Anh Nguyen
Vision language models have played a key role in extracting meaningful features for various robotic applications. Among these, Contrastive Language-Image Pretraining (CLIP) is widely used in robotic tasks that require both vision and natural language understanding. However, CLIP was trained solely on static images paired with text prompts and has not yet been fully adapted for robotic tasks involving dynamic actions. In this paper, we introduce Robotic-CLIP to enhance robotic perception capabilities. We first gather and label large-scale action data, and then build our Robotic-CLIP by fine-tuning CLIP on 309,433 videos (~7.4 million frames) of action data using contrastive learning. By leveraging action data, Robotic-CLIP inherits CLIP's strong image performance while gaining the ability to understand actions in robotic contexts. Intensive experiments show that our Robotic-CLIP outperforms other CLIP-based models across various language-driven robotic tasks. Additionally, we demonstrate the practical effectiveness of Robotic-CLIP in real-world grasping applications.
Read more9/27/2024
📊
3
Demystifying CLIP Data
Hu Xu, Saining Xie, Xiaoqing Ellen Tan, Po-Yao Huang, Russell Howes, Vasu Sharma, Shang-Wen Li, Gargi Ghosh, Luke Zettlemoyer, Christoph Feichtenhofer
Contrastive Language-Image Pre-training (CLIP) is an approach that has advanced research and applications in computer vision, fueling modern recognition systems and generative models. We believe that the main ingredient to the success of CLIP is its data and not the model architecture or pre-training objective. However, CLIP only provides very limited information about its data and how it has been collected, leading to works that aim to reproduce CLIP's data by filtering with its model parameters. In this work, we intend to reveal CLIP's data curation approach and in our pursuit of making it open to the community introduce Metadata-Curated Language-Image Pre-training (MetaCLIP). MetaCLIP takes a raw data pool and metadata (derived from CLIP's concepts) and yields a balanced subset over the metadata distribution. Our experimental study rigorously isolates the model and training settings, concentrating solely on data. MetaCLIP applied to CommonCrawl with 400M image-text data pairs outperforms CLIP's data on multiple standard benchmarks. In zero-shot ImageNet classification, MetaCLIP achieves 70.8% accuracy, surpassing CLIP's 68.3% on ViT-B models. Scaling to 1B data, while maintaining the same training budget, attains 72.4%. Our observations hold across various model sizes, exemplified by ViT-H achieving 80.5%, without any bells-and-whistles. Curation code and training data distribution on metadata is made available at https://github.com/facebookresearch/MetaCLIP.
Read more4/9/2024
0
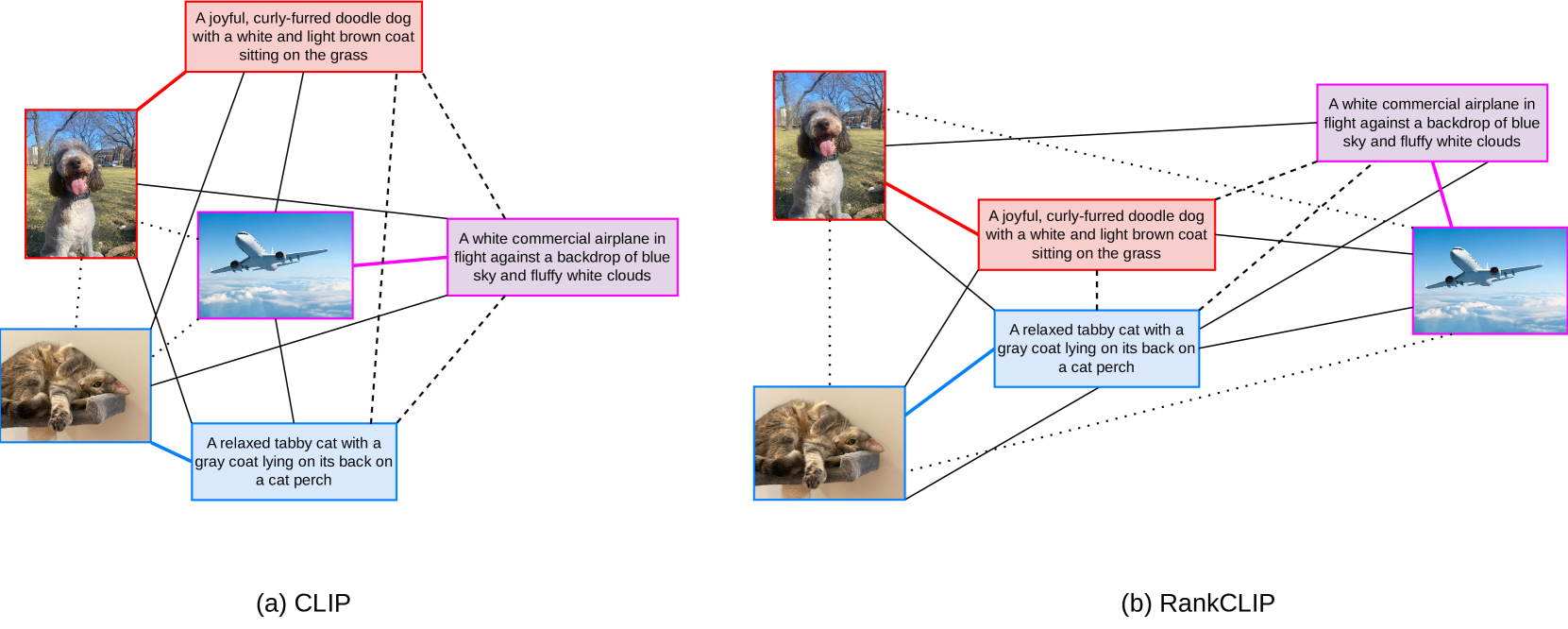
RankCLIP: Ranking-Consistent Language-Image Pretraining
Yiming Zhang, Zhuokai Zhao, Zhaorun Chen, Zhili Feng, Zenghui Ding, Yining Sun
Self-supervised contrastive learning models, such as CLIP, have set new benchmarks for vision-language models in many downstream tasks. However, their dependency on rigid one-to-one mappings overlooks the complex and often multifaceted relationships between and within texts and images. To this end, we introduce RANKCLIP, a novel pretraining method that extends beyond the rigid one-to-one matching framework of CLIP and its variants. By extending the traditional pair-wise loss to list-wise, and leveraging both in-modal and cross-modal ranking consistency, RANKCLIP improves the alignment process, enabling it to capture the nuanced many-to-many relationships between and within each modality. Through comprehensive experiments, we demonstrate the effectiveness of RANKCLIP in various downstream tasks, notably achieving significant gains in zero-shot classifications over state-of-the-art methods, underscoring the importance of this enhanced learning process.
Read more6/21/2024

0
CLIP in Medical Imaging: A Comprehensive Survey
Zihao Zhao, Yuxiao Liu, Han Wu, Mei Wang, Yonghao Li, Sheng Wang, Lin Teng, Disheng Liu, Zhiming Cui, Qian Wang, Dinggang Shen
Contrastive Language-Image Pre-training (CLIP), a simple yet effective pre-training paradigm, successfully introduces text supervision to vision models. It has shown promising results across various tasks, attributable to its generalizability and interpretability. The use of CLIP has recently gained increasing interest in the medical imaging domain, serving both as a pre-training paradigm for aligning medical vision and language, and as a critical component in diverse clinical tasks. With the aim of facilitating a deeper understanding of this promising direction, this survey offers an in-depth exploration of the CLIP paradigm within the domain of medical imaging, regarding both refined CLIP pre-training and CLIP-driven applications. In this study, We (1) start with a brief introduction to the fundamentals of CLIP methodology. (2) Then, we investigate the adaptation of CLIP pre-training in the medical domain, focusing on how to optimize CLIP given characteristics of medical images and reports. (3) Furthermore, we explore the practical utilization of CLIP pre-trained models in various tasks, including classification, dense prediction, and cross-modal tasks. (4) Finally, we discuss existing limitations of CLIP in the context of medical imaging and propose forward-looking directions to address the demands of medical imaging domain. We expect that this comprehensive survey will provide researchers in the field of medical image analysis with a holistic understanding of the CLIP paradigm and its potential implications. The project page can be found on https://github.com/zhaozh10/Awesome-CLIP-in-Medical-Imaging.
Read more8/13/2024