Robust Collaborative Perception without External Localization and Clock Devices

0
📶
Sign in to get full access
Overview
- This paper provides guidelines for preparing technical papers to be presented at IEEE-sponsored conferences and symposia.
- It covers key aspects of the paper submission process, including formatting requirements, content structure, and review procedures.
- The guidelines aim to ensure consistency and quality in the presentation of research findings at these prestigious IEEE events.
Plain English Explanation
The paper outlines the standard procedures and best practices for preparing technical papers to be presented at conferences and symposiums organized by the Institute of Electrical and Electronics Engineers (IEEE). IEEE is a leading professional organization in the fields of electrical engineering, electronics, and computer science.
The guidelines cover important elements like the expected structure and formatting of the paper, the information that should be included in different sections, and the overall submission and review process. This helps ensure that papers submitted to IEEE events adhere to a consistent format and meet the high standards expected by the organization and its attendees.
By following these guidelines, researchers and authors can increase the likelihood of their work being accepted and well-received at these prestigious IEEE-sponsored events. The clear structure and polished presentation facilitated by the guidelines can make it easier for the audience to understand and appreciate the technical content of the paper.
Technical Explanation
The paper provides a detailed set of instructions for preparing technical papers to be presented at IEEE-sponsored conferences and symposia. It covers the overall submission procedure, as well as the specific formatting and content requirements for the paper itself.
Key aspects addressed in the guidelines include:
- Localization through Particle Filter Powered Neural Network - The expected structure and organization of the paper, with standard sections like Introduction, Methodology, Results, and Conclusion.
- Enhanced Cooperative Perception for Autonomous Vehicles Using Imperfect - Formatting specifications for elements like page layout, font, and citation style to ensure a consistent appearance.
- Resource-Aware Collaborative Monte Carlo Localization Distribution - Guidelines for the content and level of detail to include in each section of the paper.
- CoSense3D: Agent-Based Efficient Learning Framework for Collective - The paper submission and review process, including deadlines, formatting requirements, and evaluation criteria.
By adhering to these guidelines, authors can increase the chances of their technical work being accepted and effectively communicated at IEEE-sponsored events. The standardized format and content structure facilitate a smooth review process and ensure a consistent, high-quality presentation of research findings.
Critical Analysis
The guidelines provided in this paper are comprehensive and well-structured, reflecting the IEEE's commitment to maintaining high standards for technical publications and presentations. The clear instructions on formatting, content, and the submission process help authors prepare papers that are likely to be well-received by the target audience.
However, the guidelines do not address some potential limitations or challenges that authors may face. For example, the paper does not discuss how to effectively communicate complex technical concepts to a diverse audience, or how to balance the need for rigor and detail with the need for conciseness and clarity.
Additionally, the guidelines may not fully account for the evolving nature of research presentation formats, such as the increasing use of multimedia elements or interactive demonstrations. As technology and communication practices continue to advance, the IEEE may need to periodically review and update these guidelines to ensure they remain relevant and applicable.
Despite these minor limitations, the guidelines provided in this paper are a valuable resource for researchers and authors seeking to present their work at IEEE-sponsored conferences and symposia. By following these well-established best practices, they can increase the impact and visibility of their research within the broader scientific community.
Conclusion
The paper outlines the standard guidelines and procedures for preparing technical papers to be presented at IEEE-sponsored conferences and symposia. These guidelines cover key aspects such as the expected structure and formatting of the paper, the content to be included in each section, and the overall submission and review process.
By adhering to these guidelines, authors can increase the likelihood of their work being accepted and effectively communicated at these prestigious events. The consistent format and high-quality presentation facilitated by the guidelines can help the audience better understand and appreciate the technical content of the research.
While the guidelines do not address all potential challenges and evolving trends in research presentation, they remain a valuable resource for researchers and authors seeking to showcase their work at IEEE-sponsored conferences and symposia. The clear instructions and well-established best practices outlined in this paper can help ensure the successful dissemination of technical innovations and discoveries within the broader scientific community.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📶
0
Robust Collaborative Perception without External Localization and Clock Devices
Zixing Lei, Zhenyang Ni, Ruize Han, Shuo Tang, Dingju Wang, Chen Feng, Siheng Chen, Yanfeng Wang
A consistent spatial-temporal coordination across multiple agents is fundamental for collaborative perception, which seeks to improve perception abilities through information exchange among agents. To achieve this spatial-temporal alignment, traditional methods depend on external devices to provide localization and clock signals. However, hardware-generated signals could be vulnerable to noise and potentially malicious attack, jeopardizing the precision of spatial-temporal alignment. Rather than relying on external hardwares, this work proposes a novel approach: aligning by recognizing the inherent geometric patterns within the perceptual data of various agents. Following this spirit, we propose a robust collaborative perception system that operates independently of external localization and clock devices. The key module of our system,~emph{FreeAlign}, constructs a salient object graph for each agent based on its detected boxes and uses a graph neural network to identify common subgraphs between agents, leading to accurate relative pose and time. We validate emph{FreeAlign} on both real-world and simulated datasets. The results show that, the ~emph{FreeAlign} empowered robust collaborative perception system perform comparably to systems relying on precise localization and clock devices.
Read more6/3/2024

0
Self-Localized Collaborative Perception
Zhenyang Ni, Zixing Lei, Yifan Lu, Dingju Wang, Chen Feng, Yanfeng Wang, Siheng Chen
Collaborative perception has garnered considerable attention due to its capacity to address several inherent challenges in single-agent perception, including occlusion and out-of-range issues. However, existing collaborative perception systems heavily rely on precise localization systems to establish a consistent spatial coordinate system between agents. This reliance makes them susceptible to large pose errors or malicious attacks, resulting in substantial reductions in perception performance. To address this, we propose~$mathtt{CoBEVGlue}$, a novel self-localized collaborative perception system, which achieves more holistic and robust collaboration without using an external localization system. The core of~$mathtt{CoBEVGlue}$ is a novel spatial alignment module, which provides the relative poses between agents by effectively matching co-visible objects across agents. We validate our method on both real-world and simulated datasets. The results show that i) $mathtt{CoBEVGlue}$ achieves state-of-the-art detection performance under arbitrary localization noises and attacks; and ii) the spatial alignment module can seamlessly integrate with a majority of previous methods, enhancing their performance by an average of $57.7%$. Code is available at https://github.com/VincentNi0107/CoBEVGlue
Read more6/19/2024
0
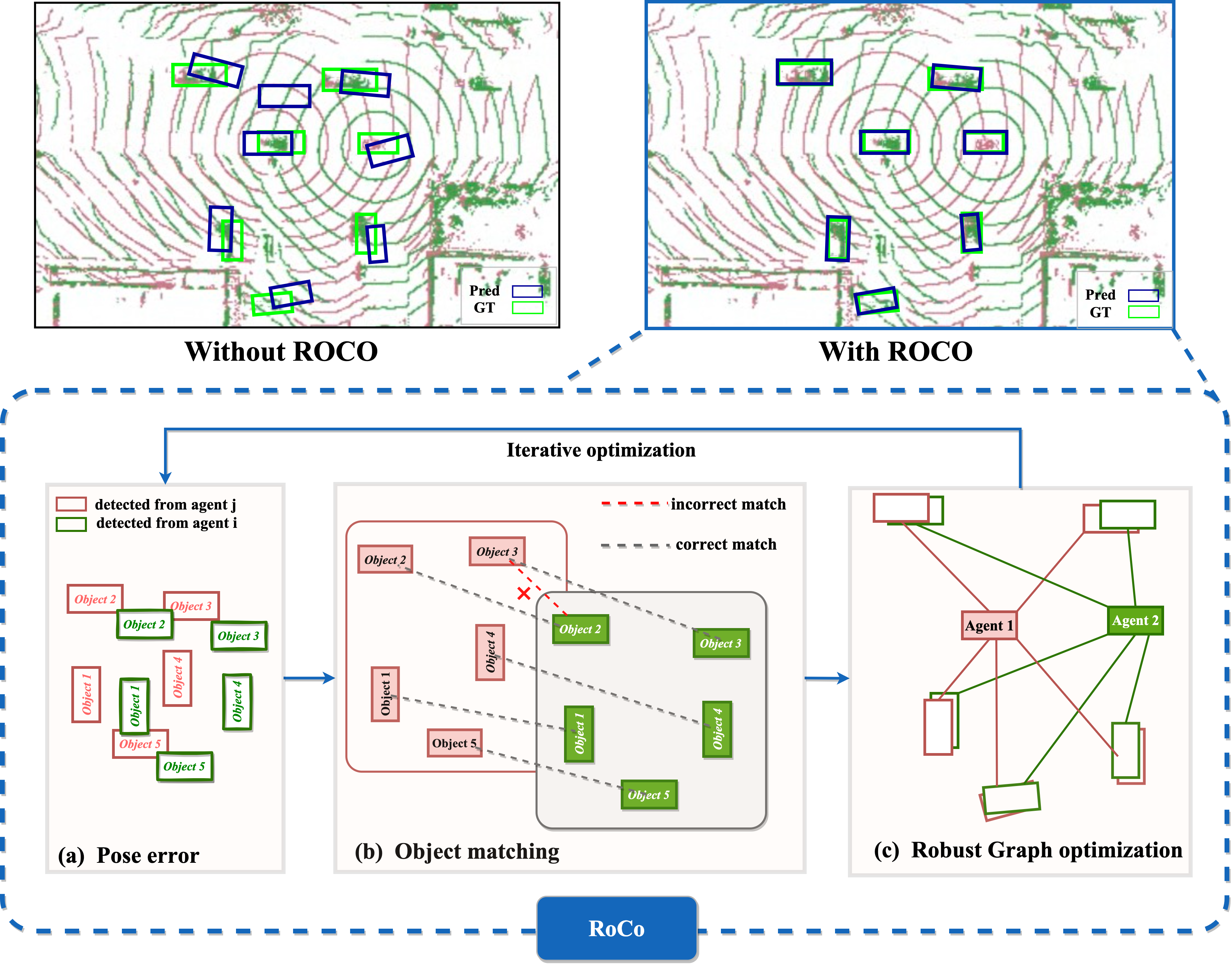
RoCo:Robust Collaborative Perception By Iterative Object Matching and Pose Adjustment
Zhe Huang, Shuo Wang, Yongcai Wang, Wanting Li, Deying Li, Lei Wang
Collaborative autonomous driving with multiple vehicles usually requires the data fusion from multiple modalities. To ensure effective fusion, the data from each individual modality shall maintain a reasonably high quality. However, in collaborative perception, the quality of object detection based on a modality is highly sensitive to the relative pose errors among the agents. It leads to feature misalignment and significantly reduces collaborative performance. To address this issue, we propose RoCo, a novel unsupervised framework to conduct iterative object matching and agent pose adjustment. To the best of our knowledge, our work is the first to model the pose correction problem in collaborative perception as an object matching task, which reliably associates common objects detected by different agents. On top of this, we propose a graph optimization process to adjust the agent poses by minimizing the alignment errors of the associated objects, and the object matching is re-done based on the adjusted agent poses. This process is carried out iteratively until convergence. Experimental study on both simulated and real-world datasets demonstrates that the proposed framework RoCo consistently outperforms existing relevant methods in terms of the collaborative object detection performance, and exhibits highly desired robustness when the pose information of agents is with high-level noise. Ablation studies are also provided to show the impact of its key parameters and components. The code is released at https://github.com/HuangZhe885/RoCo.
Read more8/2/2024

0
StreamLTS: Query-based Temporal-Spatial LiDAR Fusion for Cooperative Object Detection
Yunshuang Yuan, Monika Sester
Cooperative perception via communication among intelligent traffic agents has great potential to improve the safety of autonomous driving. However, limited communication bandwidth, localization errors and asynchronized capturing time of sensor data, all introduce difficulties to the data fusion of different agents. To some extend, previous works have attempted to reduce the shared data size, mitigate the spatial feature misalignment caused by localization errors and communication delay. However, none of them have considered the asynchronized sensor ticking times, which can lead to dynamic object misplacement of more than one meter during data fusion. In this work, we propose Time-Aligned COoperative Object Detection (TA-COOD), for which we adapt widely used dataset OPV2V and DairV2X with considering asynchronous LiDAR sensor ticking times and build an efficient fully sparse framework with modeling the temporal information of individual objects with query-based techniques. The experiment results confirmed the superior efficiency of our fully sparse framework compared to the state-of-the-art dense models. More importantly, they show that the point-wise observation timestamps of the dynamic objects are crucial for accurate modeling the object temporal context and the predictability of their time-related locations. The official code is available at url{https://github.com/YuanYunshuang/CoSense3D}.
Read more8/23/2024