RoCo:Robust Collaborative Perception By Iterative Object Matching and Pose Adjustment

0
Sign in to get full access
Overview
- Proposes a robust collaborative perception system called RoCo that enables multiple robots to collaboratively detect and localize objects in a shared environment
- Uses an iterative object matching and pose adjustment approach to improve object detection and localization accuracy
- Designed to work without relying on external localization or timing information
Plain English Explanation
The paper presents a system called RoCo that allows multiple robots to work together to detect and locate objects in their shared environment. The key idea is to use an iterative process of matching detected objects between the robots and adjusting their estimated poses (positions and orientations) to improve accuracy.
This approach is designed to work well even without access to external systems for localization (determining the robots' positions) or synchronization of their clocks. Instead, the robots rely on their own sensors and coordinate through the object matching and pose adjustment steps.
The researchers show that this collaborative perception system can achieve better object detection and localization than individual robots working alone, without needing additional infrastructure like GPS or motion capture systems.
Technical Explanation
The RoCo system works as follows:
- Each robot independently detects and localizes objects in its own sensor data (e.g. camera images, point clouds).
- The robots then share their object detections and initial pose estimates with each other.
- An iterative process of object matching and pose adjustment is used to refine the object poses:
- Objects detected by multiple robots are matched based on their appearance and location.
- The pose of each matched object is adjusted by considering all the robots' estimates, weighted by their confidence.
- This iterative process continues until the object poses converge to a stable solution.
The key innovations are the object matching and pose adjustment algorithms, which allow the system to be robust to errors in individual robot sensors and localizations. This enables collaborative perception without relying on external localization or synchronization.
Critical Analysis
The paper presents a thorough evaluation of the RoCo system, demonstrating its advantages over individual robot perception as well as alternative collaborative approaches. However, some potential limitations and areas for further research are noted:
- The experiments were conducted in simulated environments, so real-world performance may differ due to factors like sensor noise, dynamic obstacles, and calibration errors.
- The iterative pose adjustment process assumes static object poses, so it may struggle with rapidly moving objects.
- The object matching approach relies on visual appearance, which could be challenging in cluttered environments or for objects with similar appearance.
Potential future research directions could include:
- Extending the system to handle dynamic object tracking and multi-object tracking.
- Incorporating additional sensor modalities beyond visual data to improve robustness.
- Exploring decentralized or asynchronous coordination strategies to further improve scalability and robustness.
Overall, the RoCo system represents an important step towards enabling self-localized collaborative perception for multi-robot systems without the need for external infrastructure.
Conclusion
The RoCo system proposed in this paper demonstrates a novel approach to collaborative perception that allows multiple robots to work together to detect and localize objects more accurately than they could individually. By using iterative object matching and pose adjustment, the system can achieve robust performance without relying on external localization or synchronization systems.
This work advances the field of multi-robot perception, which has important applications in areas like autonomous navigation, warehouse logistics, and search and rescue operations. Further research to address the identified limitations and expand the capabilities of the system could lead to even more powerful collaborative perception solutions in the future.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
RoCo:Robust Collaborative Perception By Iterative Object Matching and Pose Adjustment
Zhe Huang, Shuo Wang, Yongcai Wang, Wanting Li, Deying Li, Lei Wang
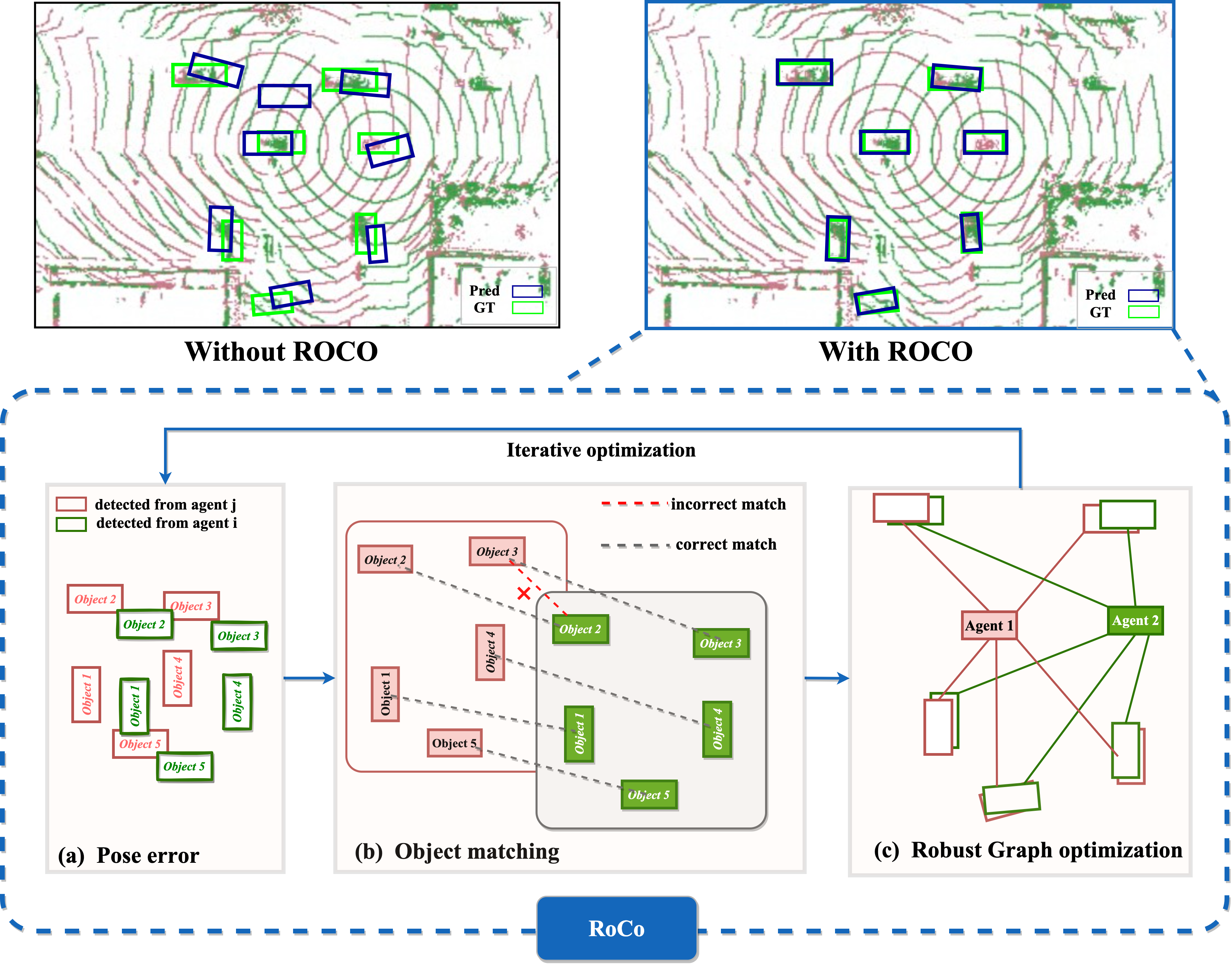
Collaborative autonomous driving with multiple vehicles usually requires the data fusion from multiple modalities. To ensure effective fusion, the data from each individual modality shall maintain a reasonably high quality. However, in collaborative perception, the quality of object detection based on a modality is highly sensitive to the relative pose errors among the agents. It leads to feature misalignment and significantly reduces collaborative performance. To address this issue, we propose RoCo, a novel unsupervised framework to conduct iterative object matching and agent pose adjustment. To the best of our knowledge, our work is the first to model the pose correction problem in collaborative perception as an object matching task, which reliably associates common objects detected by different agents. On top of this, we propose a graph optimization process to adjust the agent poses by minimizing the alignment errors of the associated objects, and the object matching is re-done based on the adjusted agent poses. This process is carried out iteratively until convergence. Experimental study on both simulated and real-world datasets demonstrates that the proposed framework RoCo consistently outperforms existing relevant methods in terms of the collaborative object detection performance, and exhibits highly desired robustness when the pose information of agents is with high-level noise. Ablation studies are also provided to show the impact of its key parameters and components. The code is released at https://github.com/HuangZhe885/RoCo.
Read more8/2/2024

0
Self-Localized Collaborative Perception
Zhenyang Ni, Zixing Lei, Yifan Lu, Dingju Wang, Chen Feng, Yanfeng Wang, Siheng Chen
Collaborative perception has garnered considerable attention due to its capacity to address several inherent challenges in single-agent perception, including occlusion and out-of-range issues. However, existing collaborative perception systems heavily rely on precise localization systems to establish a consistent spatial coordinate system between agents. This reliance makes them susceptible to large pose errors or malicious attacks, resulting in substantial reductions in perception performance. To address this, we propose~$mathtt{CoBEVGlue}$, a novel self-localized collaborative perception system, which achieves more holistic and robust collaboration without using an external localization system. The core of~$mathtt{CoBEVGlue}$ is a novel spatial alignment module, which provides the relative poses between agents by effectively matching co-visible objects across agents. We validate our method on both real-world and simulated datasets. The results show that i) $mathtt{CoBEVGlue}$ achieves state-of-the-art detection performance under arbitrary localization noises and attacks; and ii) the spatial alignment module can seamlessly integrate with a majority of previous methods, enhancing their performance by an average of $57.7%$. Code is available at https://github.com/VincentNi0107/CoBEVGlue
Read more6/19/2024

0
RoCap: A Robotic Data Collection Pipeline for the Pose Estimation of Appearance-Changing Objects
Jiahao Nick Li, Toby Chong, Zhongyi Zhou, Hironori Yoshida, Koji Yatani, Xiang 'Anthony' Chen, Takeo Igarashi
Object pose estimation plays a vital role in mixed-reality interactions when users manipulate tangible objects as controllers. Traditional vision-based object pose estimation methods leverage 3D reconstruction to synthesize training data. However, these methods are designed for static objects with diffuse colors and do not work well for objects that change their appearance during manipulation, such as deformable objects like plush toys, transparent objects like chemical flasks, reflective objects like metal pitchers, and articulated objects like scissors. To address this limitation, we propose Rocap, a robotic pipeline that emulates human manipulation of target objects while generating data labeled with ground truth pose information. The user first gives the target object to a robotic arm, and the system captures many pictures of the object in various 6D configurations. The system trains a model by using captured images and their ground truth pose information automatically calculated from the joint angles of the robotic arm. We showcase pose estimation for appearance-changing objects by training simple deep-learning models using the collected data and comparing the results with a model trained with synthetic data based on 3D reconstruction via quantitative and qualitative evaluation. The findings underscore the promising capabilities of Rocap.
Read more7/12/2024
🧪
0
CoPeD-Advancing Multi-Robot Collaborative Perception: A Comprehensive Dataset in Real-World Environments
Yang Zhou, Long Quang, Carlos Nieto-Granda, Giuseppe Loianno
In the past decade, although single-robot perception has made significant advancements, the exploration of multi-robot collaborative perception remains largely unexplored. This involves fusing compressed, intermittent, limited, heterogeneous, and asynchronous environmental information across multiple robots to enhance overall perception, despite challenges like sensor noise, occlusions, and sensor failures. One major hurdle has been the lack of real-world datasets. This paper presents a pioneering and comprehensive real-world multi-robot collaborative perception dataset to boost research in this area. Our dataset leverages the untapped potential of air-ground robot collaboration featuring distinct spatial viewpoints, complementary robot mobilities, coverage ranges, and sensor modalities. It features raw sensor inputs, pose estimation, and optional high-level perception annotation, thus accommodating diverse research interests. Compared to existing datasets predominantly designed for Simultaneous Localization and Mapping (SLAM), our setup ensures a diverse range and adequate overlap of sensor views to facilitate the study of multi-robot collaborative perception algorithms. We demonstrate the value of this dataset qualitatively through multiple collaborative perception tasks. We believe this work will unlock the potential research of high-level scene understanding through multi-modal collaborative perception in multi-robot settings.
Read more5/24/2024