Self-Localized Collaborative Perception

0

Sign in to get full access
Overview
- The research paper explores a novel approach to collaborative perception, where multiple autonomous agents, such as vehicles or robots, work together to perceive their environment without relying on external localization or a shared clock.
- This approach, known as Self-Localized Collaborative Perception, aims to enhance the robustness and efficiency of perception tasks in scenarios where traditional localization methods may not be available or reliable.
- The paper presents a detailed technical explanation of the proposed system, including its architecture and key components, as well as a critical analysis of its strengths, limitations, and potential areas for further research.
Plain English Explanation
The research paper introduces a new way for autonomous agents, like self-driving cars or robots, to work together to understand their surroundings. Typically, these agents rely on external tools like GPS or a shared clock to know where they are and how they're moving. However, in some situations, these tools may not be available or reliable.
The researchers have developed a system that allows the agents to figure out their own locations and movements without needing to depend on external localization or a shared clock. Instead, the agents use sensors and communication to collaborate and build a shared understanding of their environment.
This approach is called "Self-Localized Collaborative Perception." It aims to make the agents' perception systems more robust and efficient, so they can work together effectively even in challenging environments where traditional localization methods might not work well.
The paper explains the technical details of how this system is designed and how it operates. It also discusses the strengths and limitations of the approach, as well as potential areas for further research and improvement.
Technical Explanation
The Self-Localized Collaborative Perception system proposed in the paper allows autonomous agents, such as vehicles or robots, to collaborate in perceiving their environment without relying on external localization or a shared clock.
The key components of the system include:
-
Self-Localization: Each agent uses its onboard sensors, such as cameras and IMUs, to estimate its own location and orientation within the shared environment, without the need for GPS or other external references.
-
Collaborative Perception: The agents share their local perception data, such as object detections and semantic maps, with each other. They then fuse this information to build a comprehensive, collaborative understanding of the environment.
-
Temporal Alignment: The agents align their perception data in time, even without a shared clock, by leveraging the temporal correlations in their sensor data and the shared environmental features.
The paper presents a detailed technical explanation of the system architecture and the algorithms used for self-localization, collaborative perception, and temporal alignment. It also describes the experiments conducted to evaluate the performance of the proposed approach, including comparisons to alternative methods and analysis of the system's robustness to various challenges.
Critical Analysis
The Self-Localized Collaborative Perception approach presented in the paper addresses an important challenge in the field of autonomous systems and robotics. By enabling collaborative perception without relying on external localization or a shared clock, the system can potentially operate in a wider range of scenarios, including environments where traditional localization methods may not be available or reliable.
One potential limitation of the approach is the computational and communication overhead required for the agents to continuously share and fuse their perception data. The paper acknowledges this and suggests that further research is needed to optimize the system's efficiency and scalability, particularly in scenarios with a large number of collaborating agents.
Additionally, the paper does not extensively discuss the impact of sensor noise, environmental occlusions, or other practical challenges that may affect the accuracy and reliability of the self-localization and collaborative perception processes. Further research could explore the system's robustness to these real-world conditions and identify potential mitigation strategies.
The paper also highlights the need for continued advancements in areas such as UAV-Vehicle Collaborative Perception, Multi-Agent Collaborative Perception, and Cooperative Visual-Spatial Foundation Models to further improve the capabilities and reliability of collaborative perception systems.
Conclusion
The Self-Localized Collaborative Perception system proposed in the paper represents a significant step forward in the field of autonomous perception. By enabling collaborative perception without relying on external localization or a shared clock, the system can potentially operate in a wider range of scenarios, enhancing the robustness and flexibility of autonomous agents in tasks such as collective perception and efficient learning.
While the paper identifies some potential limitations and areas for further research, the core concepts and technical approaches presented offer a promising direction for the development of more advanced and reliable collaborative perception systems. As the field of autonomous systems continues to evolve, the insights and innovations from this research could have far-reaching implications for applications ranging from self-driving vehicles to collaborative robotics.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Self-Localized Collaborative Perception
Zhenyang Ni, Zixing Lei, Yifan Lu, Dingju Wang, Chen Feng, Yanfeng Wang, Siheng Chen
Collaborative perception has garnered considerable attention due to its capacity to address several inherent challenges in single-agent perception, including occlusion and out-of-range issues. However, existing collaborative perception systems heavily rely on precise localization systems to establish a consistent spatial coordinate system between agents. This reliance makes them susceptible to large pose errors or malicious attacks, resulting in substantial reductions in perception performance. To address this, we propose~$mathtt{CoBEVGlue}$, a novel self-localized collaborative perception system, which achieves more holistic and robust collaboration without using an external localization system. The core of~$mathtt{CoBEVGlue}$ is a novel spatial alignment module, which provides the relative poses between agents by effectively matching co-visible objects across agents. We validate our method on both real-world and simulated datasets. The results show that i) $mathtt{CoBEVGlue}$ achieves state-of-the-art detection performance under arbitrary localization noises and attacks; and ii) the spatial alignment module can seamlessly integrate with a majority of previous methods, enhancing their performance by an average of $57.7%$. Code is available at https://github.com/VincentNi0107/CoBEVGlue
Read more6/19/2024
📶
0
Robust Collaborative Perception without External Localization and Clock Devices
Zixing Lei, Zhenyang Ni, Ruize Han, Shuo Tang, Dingju Wang, Chen Feng, Siheng Chen, Yanfeng Wang
A consistent spatial-temporal coordination across multiple agents is fundamental for collaborative perception, which seeks to improve perception abilities through information exchange among agents. To achieve this spatial-temporal alignment, traditional methods depend on external devices to provide localization and clock signals. However, hardware-generated signals could be vulnerable to noise and potentially malicious attack, jeopardizing the precision of spatial-temporal alignment. Rather than relying on external hardwares, this work proposes a novel approach: aligning by recognizing the inherent geometric patterns within the perceptual data of various agents. Following this spirit, we propose a robust collaborative perception system that operates independently of external localization and clock devices. The key module of our system,~emph{FreeAlign}, constructs a salient object graph for each agent based on its detected boxes and uses a graph neural network to identify common subgraphs between agents, leading to accurate relative pose and time. We validate emph{FreeAlign} on both real-world and simulated datasets. The results show that, the ~emph{FreeAlign} empowered robust collaborative perception system perform comparably to systems relying on precise localization and clock devices.
Read more6/3/2024
0
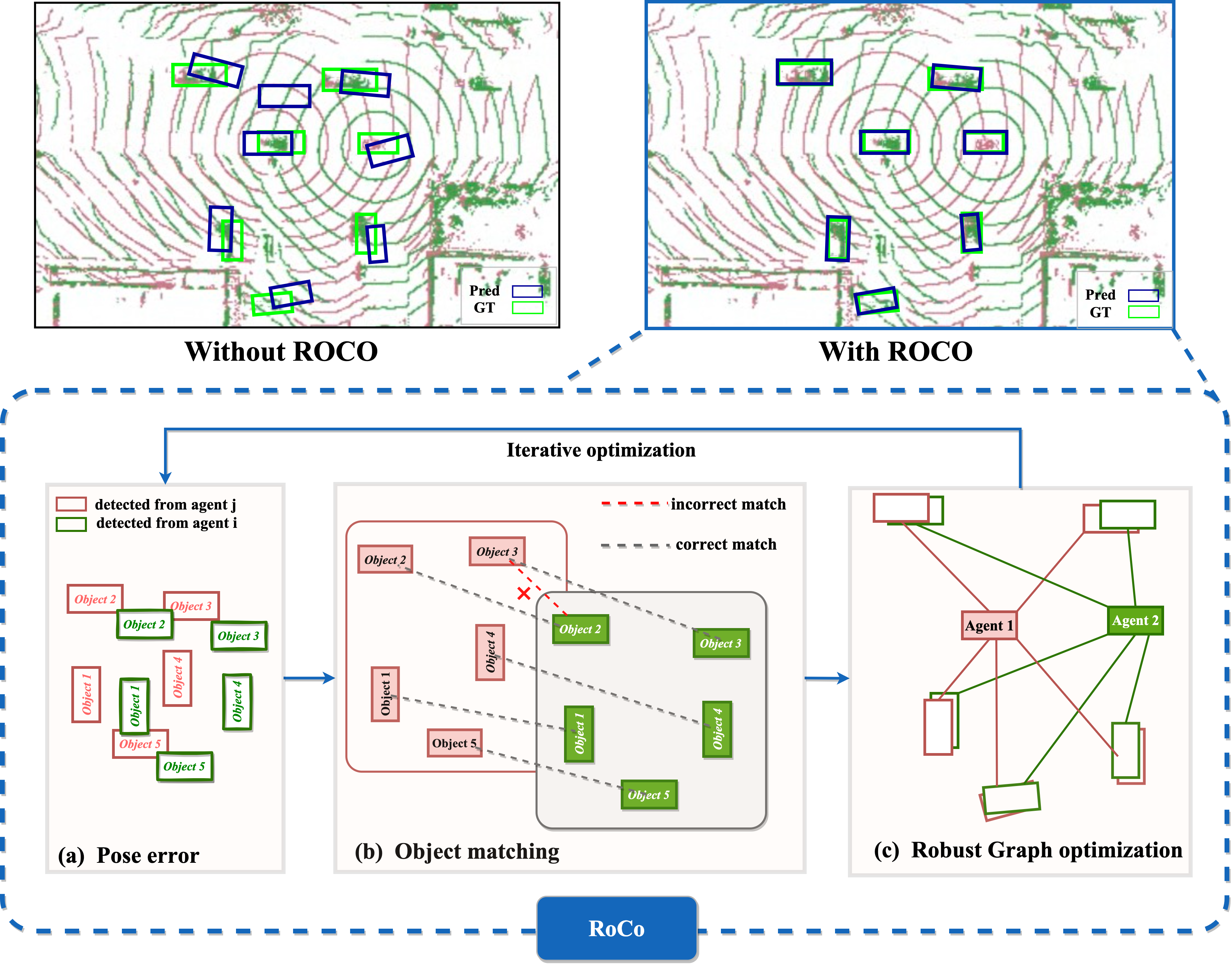
RoCo:Robust Collaborative Perception By Iterative Object Matching and Pose Adjustment
Zhe Huang, Shuo Wang, Yongcai Wang, Wanting Li, Deying Li, Lei Wang
Collaborative autonomous driving with multiple vehicles usually requires the data fusion from multiple modalities. To ensure effective fusion, the data from each individual modality shall maintain a reasonably high quality. However, in collaborative perception, the quality of object detection based on a modality is highly sensitive to the relative pose errors among the agents. It leads to feature misalignment and significantly reduces collaborative performance. To address this issue, we propose RoCo, a novel unsupervised framework to conduct iterative object matching and agent pose adjustment. To the best of our knowledge, our work is the first to model the pose correction problem in collaborative perception as an object matching task, which reliably associates common objects detected by different agents. On top of this, we propose a graph optimization process to adjust the agent poses by minimizing the alignment errors of the associated objects, and the object matching is re-done based on the adjusted agent poses. This process is carried out iteratively until convergence. Experimental study on both simulated and real-world datasets demonstrates that the proposed framework RoCo consistently outperforms existing relevant methods in terms of the collaborative object detection performance, and exhibits highly desired robustness when the pose information of agents is with high-level noise. Ablation studies are also provided to show the impact of its key parameters and components. The code is released at https://github.com/HuangZhe885/RoCo.
Read more8/2/2024

0
UVCPNet: A UAV-Vehicle Collaborative Perception Network for 3D Object Detection
Yuchao Wang, Peirui Cheng, Pengju Tian, Ziyang Yuan, Liangjin Zhao, Jing Tian, Wensheng Wang, Zhirui Wang, Xian Sun
With the advancement of collaborative perception, the role of aerial-ground collaborative perception, a crucial component, is becoming increasingly important. The demand for collaborative perception across different perspectives to construct more comprehensive perceptual information is growing. However, challenges arise due to the disparities in the field of view between cross-domain agents and their varying sensitivity to information in images. Additionally, when we transform image features into Bird's Eye View (BEV) features for collaboration, we need accurate depth information. To address these issues, we propose a framework specifically designed for aerial-ground collaboration. First, to mitigate the lack of datasets for aerial-ground collaboration, we develop a virtual dataset named V2U-COO for our research. Second, we design a Cross-Domain Cross-Adaptation (CDCA) module to align the target information obtained from different domains, thereby achieving more accurate perception results. Finally, we introduce a Collaborative Depth Optimization (CDO) module to obtain more precise depth estimation results, leading to more accurate perception outcomes. We conduct extensive experiments on both our virtual dataset and a public dataset to validate the effectiveness of our framework. Our experiments on the V2U-COO dataset and the DAIR-V2X dataset demonstrate that our method improves detection accuracy by 6.1% and 2.7%, respectively.
Read more6/10/2024