Robust Confidence Intervals in Stereo Matching using Possibility Theory
2404.06273
0
0
Abstract
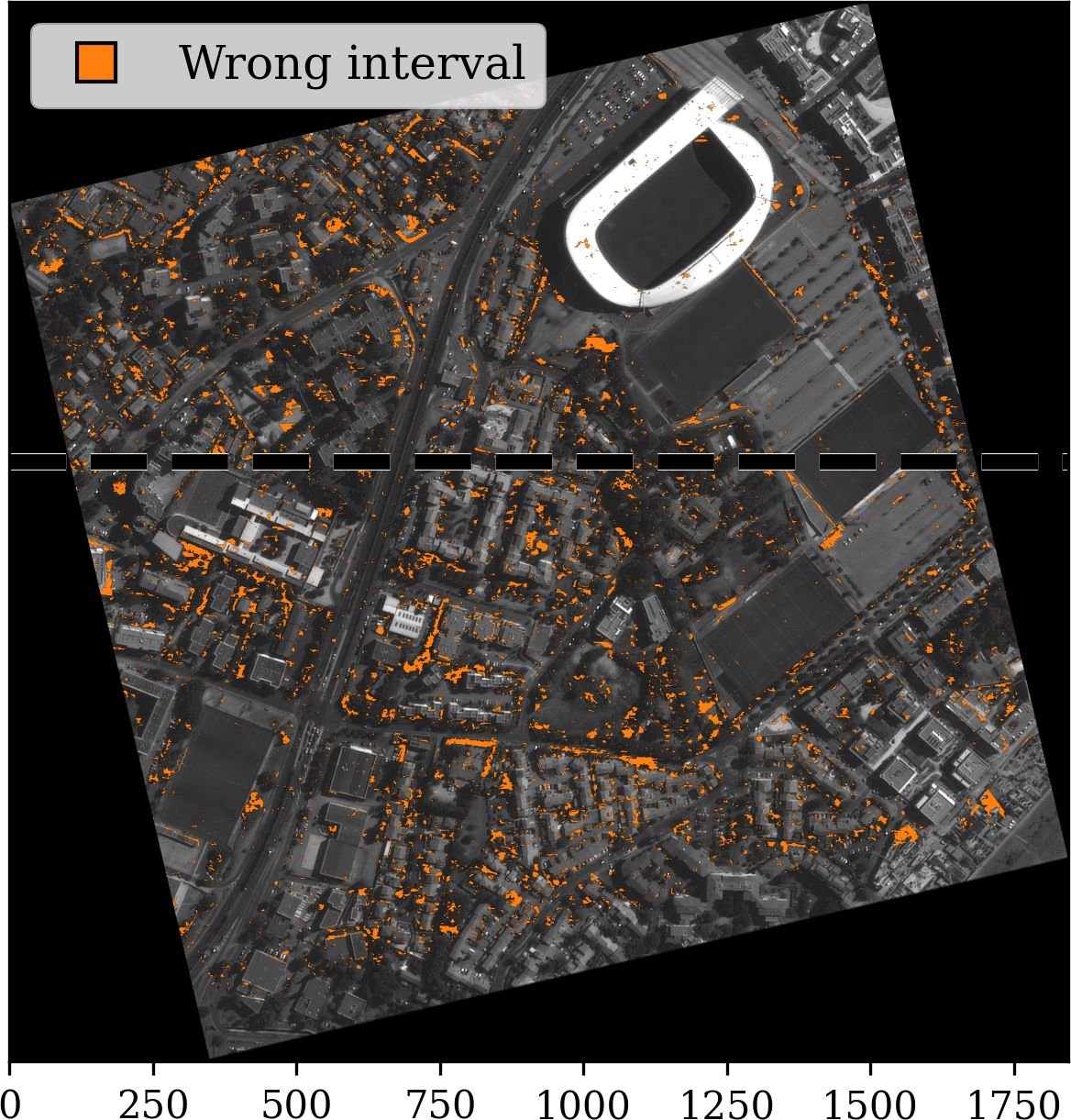
We propose a method for estimating disparity confidence intervals in stereo matching problems. Confidence intervals provide complementary information to usual confidence measures. To the best of our knowledge, this is the first method creating disparity confidence intervals based on the cost volume. This method relies on possibility distributions to interpret the epistemic uncertainty of the cost volume. Our method has the benefit of having a white-box nature, differing in this respect from current state-of-the-art deep neural networks approaches. The accuracy and size of confidence intervals are validated using the Middlebury stereo datasets as well as a dataset of satellite images. This contribution is freely available on GitHub.
Get summaries of the top AI research delivered straight to your inbox:
Overview
- This paper proposes a method for generating robust confidence intervals in stereo matching tasks using possibility theory.
- Stereo matching is the process of determining the depth or 3D structure of a scene from two or more camera views.
- The authors aim to address the challenge of estimating reliable uncertainty measures for stereo matching, which is crucial for many real-world applications.
Plain English Explanation
Stereo matching is a technique used in computer vision to figure out the 3D structure of a scene by analyzing images from two or more cameras. This is useful for all sorts of applications, like self-driving cars, robotics, and 3D modeling.
One tricky part of stereo matching is accurately estimating how confident we can be in the depth measurements we get. This paper introduces a new way to do that using an approach called "possibility theory." The key idea is to represent the uncertainty in the depth measurements as a range of possible values, rather than a single point estimate.
This allows the method to capture more nuanced information about the reliability of the depth data, which can be important in real-world settings where you need to make decisions based on that information. The paper demonstrates how this possibility-based approach can generate more robust and meaningful confidence intervals compared to standard statistical techniques.
Technical Explanation
The paper introduces a method for generating robust confidence intervals in stereo matching using possibility theory. The authors note that accurately quantifying uncertainty is crucial for many real-world applications of stereo matching, such as autonomous navigation and 3D reconstruction.
They propose representing the uncertainty in stereo depth estimates using possibility distributions, which can capture more nuanced information than traditional probabilistic approaches. The key steps are:
- Estimating a possibility distribution for the disparity (depth) at each pixel using a neural network trained on synthetic data.
- Propagating these possibility distributions through a stereo reconstruction pipeline to obtain possibility distributions for the final 3D depths.
- Extracting robust confidence intervals from the possibility distributions that reflect the inherent ambiguity in the depth estimates.
The authors evaluate their approach on standard stereo benchmarks and show that it outperforms previous techniques in terms of calibration, sharpness, and robustness of the resulting confidence intervals. This can improve the reliability and safety of systems that rely on stereo matching, such as self-driving cars and robotics.
Critical Analysis
The paper presents a novel and promising approach for uncertainty quantification in stereo matching. The use of possibility theory to represent depth ambiguity is a thoughtful departure from standard probabilistic techniques, and the empirical results demonstrate clear advantages in terms of calibration and robustness.
One potential limitation is the reliance on synthetic training data to estimate the initial pixel-wise possibility distributions. While the authors show that this generalizes well to real-world benchmarks, it would be interesting to see how the method performs when trained on more diverse real-world data. There is also ongoing research into improving the accuracy and reliability of probabilistic depth estimation models, which could be combined with the possibility-based approach.
Additionally, the paper focuses primarily on evaluating the confidence intervals, but does not explore how this uncertainty information could be leveraged in higher-level applications like 3D reconstruction or navigation. Investigating these practical use cases could uncover additional insights and requirements for the proposed technique.
Overall, this work represents an interesting and valuable contribution to the field of stereo matching, with the potential to improve the reliability and safety of computer vision systems in the real world.
Conclusion
This paper introduces a novel method for generating robust confidence intervals in stereo matching using possibility theory. By representing depth uncertainty as possibility distributions rather than traditional probabilistic models, the approach can capture more nuanced information about the reliability of depth estimates.
The authors demonstrate that this leads to improved calibration and robustness of the resulting confidence intervals, which is crucial for many real-world applications of stereo vision like autonomous navigation and 3D reconstruction. While there are some limitations and open questions, this work represents an important step forward in addressing the challenge of uncertainty quantification in stereo matching.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🔗
Confidence Intervals for Error Rates in 1:1 Matching Tasks: Critical Statistical Analysis and Recommendations
Riccardo Fogliato, Pratik Patil, Pietro Perona
0
0
Matching algorithms are commonly used to predict matches between items in a collection. For example, in 1:1 face verification, a matching algorithm predicts whether two face images depict the same person. Accurately assessing the uncertainty of the error rates of such algorithms can be challenging when data are dependent and error rates are low, two aspects that have been often overlooked in the literature. In this work, we review methods for constructing confidence intervals for error rates in 1:1 matching tasks. We derive and examine the statistical properties of these methods, demonstrating how coverage and interval width vary with sample size, error rates, and degree of data dependence on both analysis and experiments with synthetic and real-world datasets. Based on our findings, we provide recommendations for best practices for constructing confidence intervals for error rates in 1:1 matching tasks.
4/30/2024
↗️
Hinge-Wasserstein: Estimating Multimodal Aleatoric Uncertainty in Regression Tasks
Ziliang Xiong, Arvi Jonnarth, Abdelrahman Eldesokey, Joakim Johnander, Bastian Wandt, Per-Erik Forssen
0
0
Computer vision systems that are deployed in safety-critical applications need to quantify their output uncertainty. We study regression from images to parameter values and here it is common to detect uncertainty by predicting probability distributions. In this context, we investigate the regression-by-classification paradigm which can represent multimodal distributions, without a prior assumption on the number of modes. Through experiments on a specifically designed synthetic dataset, we demonstrate that traditional loss functions lead to poor probability distribution estimates and severe overconfidence, in the absence of full ground truth distributions. In order to alleviate these issues, we propose hinge-Wasserstein -- a simple improvement of the Wasserstein loss that reduces the penalty for weak secondary modes during training. This enables prediction of complex distributions with multiple modes, and allows training on datasets where full ground truth distributions are not available. In extensive experiments, we show that the proposed loss leads to substantially better uncertainty estimation on two challenging computer vision tasks: horizon line detection and stereo disparity estimation.
4/16/2024
Geometry-Informed Distance Candidate Selection for Adaptive Lightweight Omnidirectional Stereo Vision with Fisheye Images
Conner Pulling, Je Hon Tan, Yaoyu Hu, Sebastian Scherer
0
0
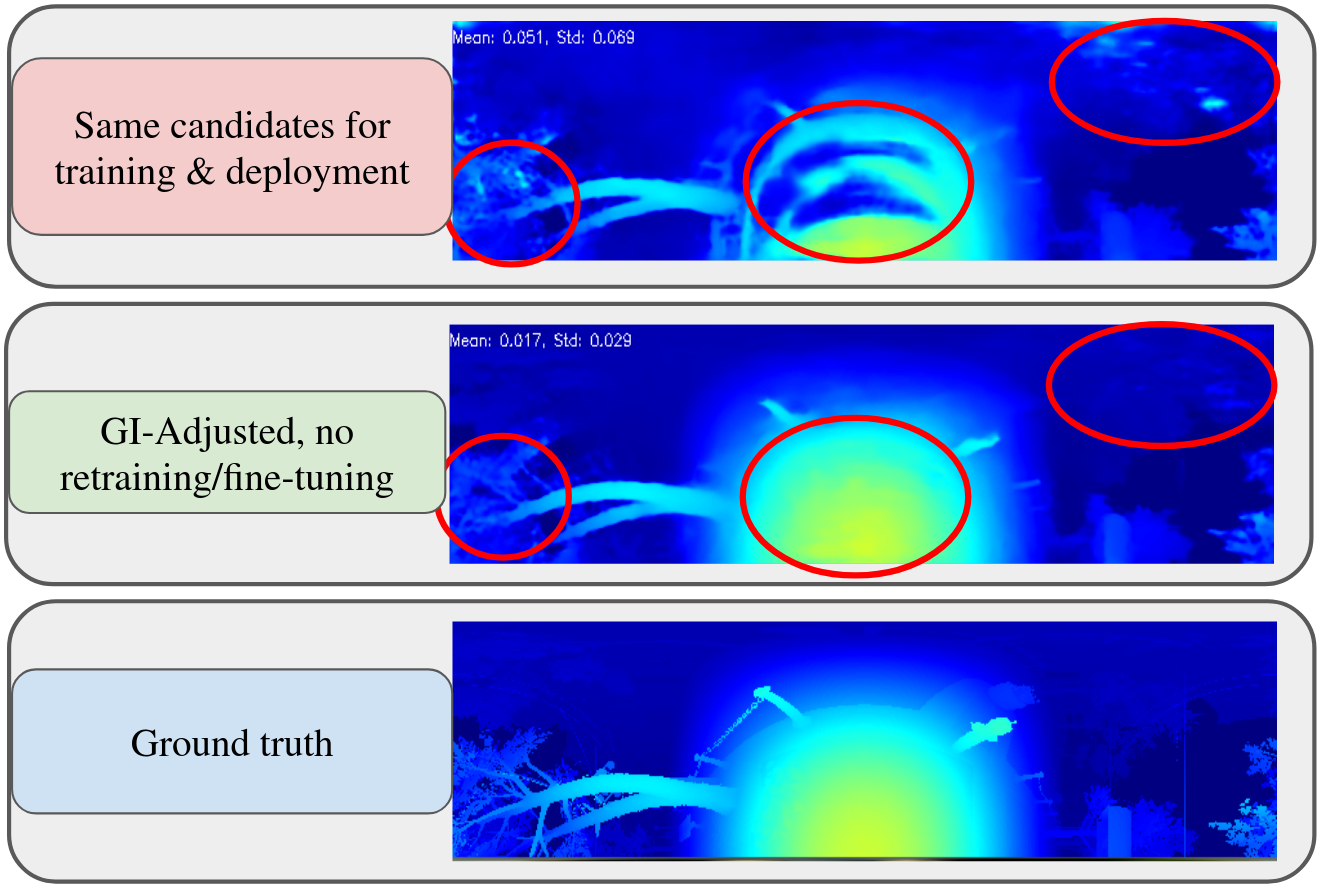
Multi-view stereo omnidirectional distance estimation usually needs to build a cost volume with many hypothetical distance candidates. The cost volume building process is often computationally heavy considering the limited resources a mobile robot has. We propose a new geometry-informed way of distance candidates selection method which enables the use of a very small number of candidates and reduces the computational cost. We demonstrate the use of the geometry-informed candidates in a set of model variants. We find that by adjusting the candidates during robot deployment, our geometry-informed distance candidates also improve a pre-trained model's accuracy if the extrinsics or the number of cameras changes. Without any re-training or fine-tuning, our models outperform models trained with evenly distributed distance candidates. Models are also released as hardware-accelerated versions with a new dedicated large-scale dataset. The project page, code, and dataset can be found at https://theairlab.org/gicandidates/ .
5/10/2024
🖼️
Metric-guided Image Reconstruction Bounds via Conformal Prediction
Matt Y Cheung, Tucker J Netherton, Laurence E Court, Ashok Veeraraghavan, Guha Balakrishnan
0
0
Recent advancements in machine learning have led to novel imaging systems and algorithms that address ill-posed problems. Assessing their trustworthiness and understanding how to deploy them safely at test time remains an important and open problem. We propose a method that leverages conformal prediction to retrieve upper/lower bounds and statistical inliers/outliers of reconstructions based on the prediction intervals of downstream metrics. We apply our method to sparse-view CT for downstream radiotherapy planning and show 1) that metric-guided bounds have valid coverage for downstream metrics while conventional pixel-wise bounds do not and 2) anatomical differences of upper/lower bounds between metric-guided and pixel-wise methods. Our work paves the way for more meaningful reconstruction bounds. Code available at https://github.com/matthewyccheung/conformal-metric
4/24/2024