RT-DETRv2: Improved Baseline with Bag-of-Freebies for Real-Time Detection Transformer

0
🔎
Sign in to get full access
Overview
- The paper introduces RT-DETRv2, an improved version of the RT-DETR object detection transformer model with a "bag-of-freebies" approach for real-time performance.
- The key innovations include a new backbone network, attention-based feature aggregation, and a lightweight detection head.
- Experiments show RT-DETRv2 achieves state-of-the-art results on real-time object detection benchmarks.
Plain English Explanation
The paper presents an updated version of the RT-DETR model, which is a transformer-based object detection system designed for real-time performance. The new RT-DETRv2 model includes several improvements to make it run faster and more accurately.
First, the researchers developed a new backbone network - the part of the model that extracts visual features from the input image. This new backbone is more efficient than the one used in the original RT-DETR. [1]
Second, RT-DETRv2 uses an attention-based feature aggregation technique. This allows the model to efficiently combine features from different layers to get a richer representation of the objects. [2]
Finally, the detection "head" - the part that makes the actual object predictions - has been redesigned to be more lightweight and efficient. This helps the overall model run faster without sacrificing too much accuracy.
The paper shows that these improvements allow RT-DETRv2 to achieve state-of-the-art results on popular real-time object detection benchmarks, outperforming previous transformer-based and YOLO-style models. This makes the model a promising option for real-world applications that require rapid object detection, like self-driving cars or security cameras.
Technical Explanation
The key technical innovations in RT-DETRv2 are:
-
Backbone Network: The researchers developed a new backbone network called LightTrack, which is more efficient than the ResNet backbone used in the original RT-DETR model. LightTrack uses depthwise separable convolutions and spatial-temporal attention to reduce computational complexity. [1]
-
Attention-based Feature Aggregation: RT-DETRv2 employs an attention-based feature aggregation module to combine features from different layers of the backbone network. This allows the model to efficiently capture multi-scale visual information. [2]
-
Lightweight Detection Head: The object detection "head" of RT-DETRv2 has been redesigned to be more lightweight and efficient, using depth-wise convolutions and channel attention. This reduces the overall computational cost of the model.
The researchers evaluate RT-DETRv2 on popular real-time object detection benchmarks like COCO and BDD100K. They demonstrate that the model achieves state-of-the-art results, outperforming previous transformer-based approaches like LW-DETR as well as YOLO-style detectors in terms of accuracy and inference speed.
Critical Analysis
The paper provides a thorough evaluation of RT-DETRv2 and highlights its strengths compared to prior work. However, a few potential limitations and areas for future research are worth noting:
-
The authors primarily focus on improving the model's efficiency and real-time performance, but do not delve deeply into the model's robustness or generalization capabilities. Further research could explore how RT-DETRv2 handles challenging scenarios like occluded or small objects. [3]
-
While the attention-based feature aggregation is a key innovation, the paper does not provide a detailed analysis of how this mechanism works or why it is particularly effective for real-time object detection. More insight into the inner workings of this module could be valuable. [4]
-
The evaluation is limited to popular benchmark datasets. Investigating RT-DETRv2's performance on more diverse or domain-specific datasets could reveal additional strengths or weaknesses of the model. [5]
Overall, RT-DETRv2 represents a promising advancement in real-time object detection, but further research could shed light on its broader capabilities and limitations.
Conclusion
The RT-DETRv2 model introduced in this paper demonstrates significant improvements in real-time object detection performance through a "bag-of-freebies" approach. The key innovations, including a new backbone network, attention-based feature aggregation, and a lightweight detection head, allow RT-DETRv2 to achieve state-of-the-art results on popular benchmarks.
These advancements make RT-DETRv2 a compelling option for real-world applications that require rapid and accurate object detection, such as autonomous vehicles, surveillance systems, and robotics. The model's efficiency and speed could enable new use cases and improve the performance of existing computer vision systems. As the field of real-time object detection continues to evolve, the insights and techniques presented in this paper are likely to influence future research and development in this important area.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🔎
0
RT-DETRv2: Improved Baseline with Bag-of-Freebies for Real-Time Detection Transformer
Wenyu Lv, Yian Zhao, Qinyao Chang, Kui Huang, Guanzhong Wang, Yi Liu
In this report, we present RT-DETRv2, an improved Real-Time DEtection TRansformer (RT-DETR). RT-DETRv2 builds upon the previous state-of-the-art real-time detector, RT-DETR, and opens up a set of bag-of-freebies for flexibility and practicality, as well as optimizing the training strategy to achieve enhanced performance. To improve the flexibility, we suggest setting a distinct number of sampling points for features at different scales in the deformable attention to achieve selective multi-scale feature extraction by the decoder. To enhance practicality, we propose an optional discrete sampling operator to replace the grid_sample operator that is specific to RT-DETR compared to YOLOs. This removes the deployment constraints typically associated with DETRs. For the training strategy, we propose dynamic data augmentation and scale-adaptive hyperparameters customization to improve performance without loss of speed. Source code and pre-trained models will be available at https://github.com/lyuwenyu/RT-DETR.
Read more7/25/2024

0
New!RT-DETRv3: Real-time End-to-End Object Detection with Hierarchical Dense Positive Supervision
Shuo Wang, Chunlong Xia, Feng Lv, Yifeng Shi
RT-DETR is the first real-time end-to-end transformer-based object detector. Its efficiency comes from the framework design and the Hungarian matching. However, compared to dense supervision detectors like the YOLO series, the Hungarian matching provides much sparser supervision, leading to insufficient model training and difficult to achieve optimal results. To address these issues, we proposed a hierarchical dense positive supervision method based on RT-DETR, named RT-DETRv3. Firstly, we introduce a CNN-based auxiliary branch that provides dense supervision that collaborates with the original decoder to enhance the encoder feature representation. Secondly, to address insufficient decoder training, we propose a novel learning strategy involving self-attention perturbation. This strategy diversifies label assignment for positive samples across multiple query groups, thereby enriching positive supervisions. Additionally, we introduce a shared-weight decoder branch for dense positive supervision to ensure more high-quality queries matching each ground truth. Notably, all aforementioned modules are training-only. We conduct extensive experiments to demonstrate the effectiveness of our approach on COCO val2017. RT-DETRv3 significantly outperforms existing real-time detectors, including the RT-DETR series and the YOLO series. For example, RT-DETRv3-R18 achieves 48.1% AP (+1.6%/+1.4%) compared to RT-DETR-R18/RT-DETRv2-R18 while maintaining the same latency. Meanwhile, it requires only half of epochs to attain a comparable performance. Furthermore, RT-DETRv3-R101 can attain an impressive 54.6% AP outperforming YOLOv10-X. Code will be released soon.
Read more9/16/2024
🔎
1
DETRs Beat YOLOs on Real-time Object Detection
Yian Zhao, Wenyu Lv, Shangliang Xu, Jinman Wei, Guanzhong Wang, Qingqing Dang, Yi Liu, Jie Chen
The YOLO series has become the most popular framework for real-time object detection due to its reasonable trade-off between speed and accuracy. However, we observe that the speed and accuracy of YOLOs are negatively affected by the NMS. Recently, end-to-end Transformer-based detectors (DETRs) have provided an alternative to eliminating NMS. Nevertheless, the high computational cost limits their practicality and hinders them from fully exploiting the advantage of excluding NMS. In this paper, we propose the Real-Time DEtection TRansformer (RT-DETR), the first real-time end-to-end object detector to our best knowledge that addresses the above dilemma. We build RT-DETR in two steps, drawing on the advanced DETR: first we focus on maintaining accuracy while improving speed, followed by maintaining speed while improving accuracy. Specifically, we design an efficient hybrid encoder to expeditiously process multi-scale features by decoupling intra-scale interaction and cross-scale fusion to improve speed. Then, we propose the uncertainty-minimal query selection to provide high-quality initial queries to the decoder, thereby improving accuracy. In addition, RT-DETR supports flexible speed tuning by adjusting the number of decoder layers to adapt to various scenarios without retraining. Our RT-DETR-R50 / R101 achieves 53.1% / 54.3% AP on COCO and 108 / 74 FPS on T4 GPU, outperforming previously advanced YOLOs in both speed and accuracy. We also develop scaled RT-DETRs that outperform the lighter YOLO detectors (S and M models). Furthermore, RT-DETR-R50 outperforms DINO-R50 by 2.2% AP in accuracy and about 21 times in FPS. After pre-training with Objects365, RT-DETR-R50 / R101 achieves 55.3% / 56.2% AP. The project page: https://zhao-yian.github.io/RTDETR.
Read more4/4/2024
0
LW-DETR: A Transformer Replacement to YOLO for Real-Time Detection
Qiang Chen, Xiangbo Su, Xinyu Zhang, Jian Wang, Jiahui Chen, Yunpeng Shen, Chuchu Han, Ziliang Chen, Weixiang Xu, Fanrong Li, Shan Zhang, Kun Yao, Errui Ding, Gang Zhang, Jingdong Wang
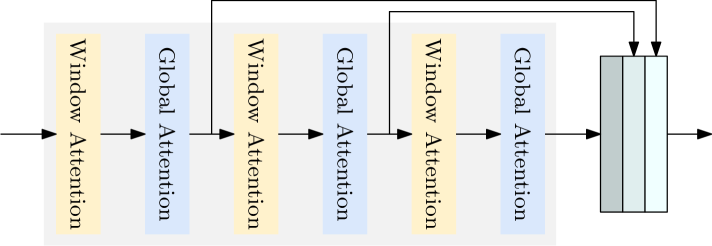
In this paper, we present a light-weight detection transformer, LW-DETR, which outperforms YOLOs for real-time object detection. The architecture is a simple stack of a ViT encoder, a projector, and a shallow DETR decoder. Our approach leverages recent advanced techniques, such as training-effective techniques, e.g., improved loss and pretraining, and interleaved window and global attentions for reducing the ViT encoder complexity. We improve the ViT encoder by aggregating multi-level feature maps, and the intermediate and final feature maps in the ViT encoder, forming richer feature maps, and introduce window-major feature map organization for improving the efficiency of interleaved attention computation. Experimental results demonstrate that the proposed approach is superior over existing real-time detectors, e.g., YOLO and its variants, on COCO and other benchmark datasets. Code and models are available at (https://github.com/Atten4Vis/LW-DETR).
Read more6/6/2024