Safe and Personalizable Logical Guidance for Trajectory Planning of Autonomous Driving
2405.13704
0
0
➖
Abstract
Autonomous vehicles necessitate a delicate balance between safety, efficiency, and user preferences in trajectory planning. Existing traditional or learning-based methods face challenges in adequately addressing all these aspects. In response, this paper proposes a novel component termed the Logical Guidance Layer (LGL), designed for seamless integration into autonomous driving trajectory planning frameworks, specifically tailored for highway scenarios. The LGL guides the trajectory planning with a local target area determined through scenario reasoning, scenario evaluation, and guidance area calculation. Integrating the Responsibility-Sensitive Safety (RSS) model, the LGL ensures formal safety guarantees while accommodating various user preferences defined by logical formulae. Experimental validation demonstrates the effectiveness of the LGL in achieving a balance between safety and efficiency, and meeting user preferences in autonomous highway driving scenarios.
Create account to get full access
Overview
- Autonomous vehicles must balance safety, efficiency, and user preferences in trajectory planning
- Existing methods face challenges in addressing all these aspects adequately
- This paper proposes a novel "Logical Guidance Layer" (LGL) for autonomous driving trajectory planning, tailored for highway scenarios
Plain English Explanation
Self-driving cars need to carefully consider multiple factors when planning their paths, including safety, how efficiently they can reach their destination, and the preferences of the people inside. Current approaches to planning these driving paths, either using traditional methods or machine learning, struggle to properly balance all these different considerations.
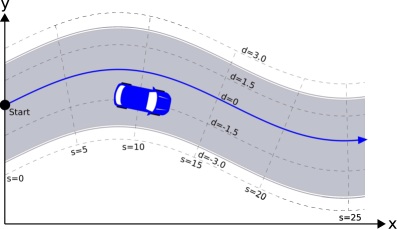
To address this, the researchers in this paper have developed a new component called the Logical Guidance Layer (LGL). The LGL is designed to be integrated into the trajectory planning systems of autonomous vehicles, especially for driving on highways. It uses reasoning about the current driving scenario, evaluating different options, and calculating a target area for the vehicle to aim towards. By incorporating a safety model called Responsibility-Sensitive Safety (RSS), the LGL ensures the planned paths are formally safe, while also accommodating the preferences of the vehicle's passengers, which can be specified using logical rules.
Through experiments, the researchers demonstrate that the LGL is effective at achieving a balance between safety, efficiency, and user preferences when autonomous vehicles are driving on highways.
Technical Explanation
The core of the researchers' approach is the Logical Guidance Layer (LGL), which is designed to be integrated into autonomous driving trajectory planning frameworks, particularly for highway scenarios. The LGL guides the trajectory planning process by determining a local target area for the vehicle to aim towards.
This is achieved through three key steps:
-
Scenario Reasoning: The LGL analyzes the current driving scenario to understand the context and constraints.
-
Scenario Evaluation: The LGL evaluates different possible scenarios and their implications for safe and efficient driving.
-
Guidance Area Calculation: Based on the scenario analysis, the LGL determines a local target area for the vehicle's trajectory planning.
Crucially, the LGL integrates the Responsibility-Sensitive Safety (RSS) model to ensure formal safety guarantees for the planned trajectories. Additionally, the LGL accommodates various user preferences, which can be specified using logical formulae.
The researchers validate the effectiveness of the LGL through experimental evaluation, demonstrating its ability to balance safety, efficiency, and user preferences in autonomous highway driving scenarios.
Critical Analysis
The researchers acknowledge some limitations of their approach. For example, the LGL is currently tailored specifically for highway driving scenarios, and its performance in other driving contexts is not yet evaluated. Additionally, the integration of user preferences through logical formulae may be challenging for non-technical users to specify in practice.
Further research could explore expanding the LGL to handle a wider range of driving scenarios, as well as investigating more intuitive or automated ways for users to communicate their preferences to the system. Integrating the LGL with other advanced trajectory prediction and planning techniques could also enhance the overall capabilities of autonomous driving systems.
Conclusion
This paper presents a novel Logical Guidance Layer (LGL) designed to improve the trajectory planning of autonomous vehicles, particularly in highway driving scenarios. By reasoning about the driving context, evaluating potential scenarios, and calculating a target area, the LGL is able to balance the competing priorities of safety, efficiency, and user preferences.
The integration of the Responsibility-Sensitive Safety model and the accommodation of logical user preferences are key innovations that demonstrate the researchers' thoughtful approach to this complex challenge. While there are opportunities for further refinement and expansion, the LGL represents a promising step forward in the development of robust and reliable autonomous driving systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
An Online Spatial-Temporal Graph Trajectory Planner for Autonomous Vehicles
Jilan Samiuddin, Benoit Boulet, Di Wu
0
0
The autonomous driving industry is expected to grow by over 20 times in the coming decade and, thus, motivate researchers to delve into it. The primary focus of their research is to ensure safety, comfort, and efficiency. An autonomous vehicle has several modules responsible for one or more of the aforementioned items. Among these modules, the trajectory planner plays a pivotal role in the safety of the vehicle and the comfort of its passengers. The module is also responsible for respecting kinematic constraints and any applicable road constraints. In this paper, a novel online spatial-temporal graph trajectory planner is introduced to generate safe and comfortable trajectories. First, a spatial-temporal graph is constructed using the autonomous vehicle, its surrounding vehicles, and virtual nodes along the road with respect to the vehicle itself. Next, the graph is forwarded into a sequential network to obtain the desired states. To support the planner, a simple behavioral layer is also presented that determines kinematic constraints for the planner. Furthermore, a novel potential function is also proposed to train the network. Finally, the proposed planner is tested on three different complex driving tasks, and the performance is compared with two frequently used methods. The results show that the proposed planner generates safe and feasible trajectories while achieving similar or longer distances in the forward direction and comparable comfort ride.
4/19/2024
🔮
A Cognitive-Driven Trajectory Prediction Model for Autonomous Driving in Mixed Autonomy Environment
Haicheng Liao, Zhenning Li, Chengyue Wang, Bonan Wang, Hanlin Kong, Yanchen Guan, Guofa Li, Zhiyong Cui, Chengzhong Xu
0
0
As autonomous driving technology progresses, the need for precise trajectory prediction models becomes paramount. This paper introduces an innovative model that infuses cognitive insights into trajectory prediction, focusing on perceived safety and dynamic decision-making. Distinct from traditional approaches, our model excels in analyzing interactions and behavior patterns in mixed autonomy traffic scenarios. It represents a significant leap forward, achieving marked performance improvements on several key datasets. Specifically, it surpasses existing benchmarks with gains of 16.2% on the Next Generation Simulation (NGSIM), 27.4% on the Highway Drone (HighD), and 19.8% on the Macao Connected Autonomous Driving (MoCAD) dataset. Our proposed model shows exceptional proficiency in handling corner cases, essential for real-world applications. Moreover, its robustness is evident in scenarios with missing or limited data, outperforming most of the state-of-the-art baselines. This adaptability and resilience position our model as a viable tool for real-world autonomous driving systems, heralding a new standard in vehicle trajectory prediction for enhanced safety and efficiency.
4/29/2024
A Superalignment Framework in Autonomous Driving with Large Language Models
Xiangrui Kong, Thomas Braunl, Marco Fahmi, Yue Wang
0
0
Over the last year, significant advancements have been made in the realms of large language models (LLMs) and multi-modal large language models (MLLMs), particularly in their application to autonomous driving. These models have showcased remarkable abilities in processing and interacting with complex information. In autonomous driving, LLMs and MLLMs are extensively used, requiring access to sensitive vehicle data such as precise locations, images, and road conditions. These data are transmitted to an LLM-based inference cloud for advanced analysis. However, concerns arise regarding data security, as the protection against data and privacy breaches primarily depends on the LLM's inherent security measures, without additional scrutiny or evaluation of the LLM's inference outputs. Despite its importance, the security aspect of LLMs in autonomous driving remains underexplored. Addressing this gap, our research introduces a novel security framework for autonomous vehicles, utilizing a multi-agent LLM approach. This framework is designed to safeguard sensitive information associated with autonomous vehicles from potential leaks, while also ensuring that LLM outputs adhere to driving regulations and align with human values. It includes mechanisms to filter out irrelevant queries and verify the safety and reliability of LLM outputs. Utilizing this framework, we evaluated the security, privacy, and cost aspects of eleven large language model-driven autonomous driving cues. Additionally, we performed QA tests on these driving prompts, which successfully demonstrated the framework's efficacy.
6/11/2024
💬
HighwayLLM: Decision-Making and Navigation in Highway Driving with RL-Informed Language Model
Mustafa Yildirim, Barkin Dagda, Saber Fallah
0
0
Autonomous driving is a complex task which requires advanced decision making and control algorithms. Understanding the rationale behind the autonomous vehicles' decision is crucial to ensure their safe and effective operation on highway driving. This study presents a novel approach, HighwayLLM, which harnesses the reasoning capabilities of large language models (LLMs) to predict the future waypoints for ego-vehicle's navigation. Our approach also utilizes a pre-trained Reinforcement Learning (RL) model to serve as a high-level planner, making decisions on appropriate meta-level actions. The HighwayLLM combines the output from the RL model and the current state information to make safe, collision-free, and explainable predictions for the next states, thereby constructing a trajectory for the ego-vehicle. Subsequently, a PID-based controller guides the vehicle to the waypoints predicted by the LLM agent. This integration of LLM with RL and PID enhances the decision-making process and provides interpretability for highway autonomous driving.
5/24/2024