Safety-Critical Edge Robotics Architecture with Bounded End-to-End Latency

0

Sign in to get full access
Overview
- Presents a safety-critical edge robotics architecture with bounded end-to-end latency
- Focuses on real-time control and perception for safety-critical applications
- Aims to provide deterministic and low-latency communication between components
Plain English Explanation
This paper describes a new design for the software architecture of robots that need to operate in safety-critical environments. The key goal is to ensure that the information flowing between the different parts of the robot (like sensors, control systems, and actuators) is delivered quickly and reliably, without any unexpected delays.
This is important for robots that need to respond in real-time, like those used in industrial automation or autonomous vehicles. Delays in the robot's decision-making or reactions could lead to dangerous situations.
The proposed architecture uses techniques like edge computing and real-time communication protocols to minimize latency and ensure predictable performance. It also includes mechanisms to monitor the health of the system and gracefully handle failures.
Technical Explanation
The paper presents a novel safety-critical edge robotics architecture that provides bounded end-to-end latency. The key elements include:
-
Real-Time Control and Perception: The architecture is designed to support real-time control and perception tasks required for safety-critical applications. This includes deterministic and low-latency communication between the various components.
-
Edge Computing: The system leverages edge computing to perform time-critical processing close to the sensors and actuators, reducing end-to-end latency.
-
Tiered Communication: A tiered communication approach is used, with a real-time, deterministic bus for critical data and a separate network for non-critical communication.
-
Health Monitoring: The system includes mechanisms to continuously monitor the health of the different components and gracefully handle failures to maintain safe operation.
The authors evaluate the proposed architecture through simulation and demonstrate its ability to meet the latency and reliability requirements of safety-critical robotics applications.
Critical Analysis
The paper presents a well-designed architecture that addresses the key challenges of real-time, safety-critical robotics. The use of edge computing and tiered communication are promising approaches to ensuring low and bounded latency.
However, the authors acknowledge that the evaluation is limited to simulations, and further work is needed to validate the architecture's performance in real-world deployments. Additional considerations, such as the scalability of the system and the overhead of the health monitoring mechanisms, may also be important areas for future research.
It would also be valuable to see how this architecture compares to other approaches in the literature, such as the software-based security framework for edge-mobile IoT or the communication-adaptive parallel system for real-time applications.
Conclusion
This paper presents a promising safety-critical edge robotics architecture that aims to provide deterministic and low-latency communication between the various components of a robotic system. By leveraging edge computing and real-time communication protocols, the architecture can meet the stringent requirements of safety-critical applications, such as industrial automation and autonomous vehicles.
While the simulation-based evaluation is a good first step, further research is needed to validate the architecture's performance in real-world deployments and explore its scalability and overhead. Nevertheless, this work represents an important contribution to the field of safety-critical robotics and could have significant implications for the development of reliable and responsive robotic systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Safety-Critical Edge Robotics Architecture with Bounded End-to-End Latency
Gautam Gala, Tilmann Unte, Luiz Maia, Johannes Kuhbacher, Isser Kadusale, Mohammad Ibrahim Alkoudsi, Gerhard Fohler, Sebastian Altmeyer
Edge computing processes data near its source, reducing latency and enhancing security compared to traditional cloud computing while providing its benefits. This paper explores edge computing for migrating an existing safety-critical robotics use case from an onboard dedicated hardware solution. We propose an edge robotics architecture based on Linux, Docker containers, Kubernetes, and a local wireless area network based on the TTWiFi protocol. Inspired by previous work on real-time cloud, we complement the architecture with a resource management and orchestration layer to help Linux manage, and Kubernetes orchestrate the system-wide shared resources (e.g., caches, memory bandwidth, and network). Our architecture aims to ensure the fault-tolerant and predictable execution of robotic applications (e.g., path planning) on the edge while upper-bounding the end-to-end latency and ensuring the best possible quality of service without jeopardizing safety and security.
Read more6/24/2024
🎲
0
A Containerized Microservice Architecture for a ROS 2 Autonomous Driving Software: An End-to-End Latency Evaluation
Tobias Betz, Long Wen, Fengjunjie Pan, Gemb Kaljavesi, Alexander Zuepke, Andrea Bastoni, Marco Caccamo, Alois Knoll, Johannes Betz
The automotive industry is transitioning from traditional ECU-based systems to software-defined vehicles. A central role of this revolution is played by containers, lightweight virtualization technologies that enable the flexible consolidation of complex software applications on a common hardware platform. Despite their widespread adoption, the impact of containerization on fundamental real-time metrics such as end-to-end latency, communication jitter, as well as memory and CPU utilization has remained virtually unexplored. This paper presents a microservice architecture for a real-world autonomous driving application where containers isolate each service. Our comprehensive evaluation shows the benefits in terms of end-to-end latency of such a solution even over standard bare-Linux deployments. Specifically, in the case of the presented microservice architecture, the mean end-to-end latency can be improved by 5-8 %. Also, the maximum latencies were significantly reduced using container deployment.
Read more4/22/2024
0
Software-based Security Framework for Edge and Mobile IoT
Jos'e Cec'ilio, Alan Oliveira de S'a, Andr'e Souto
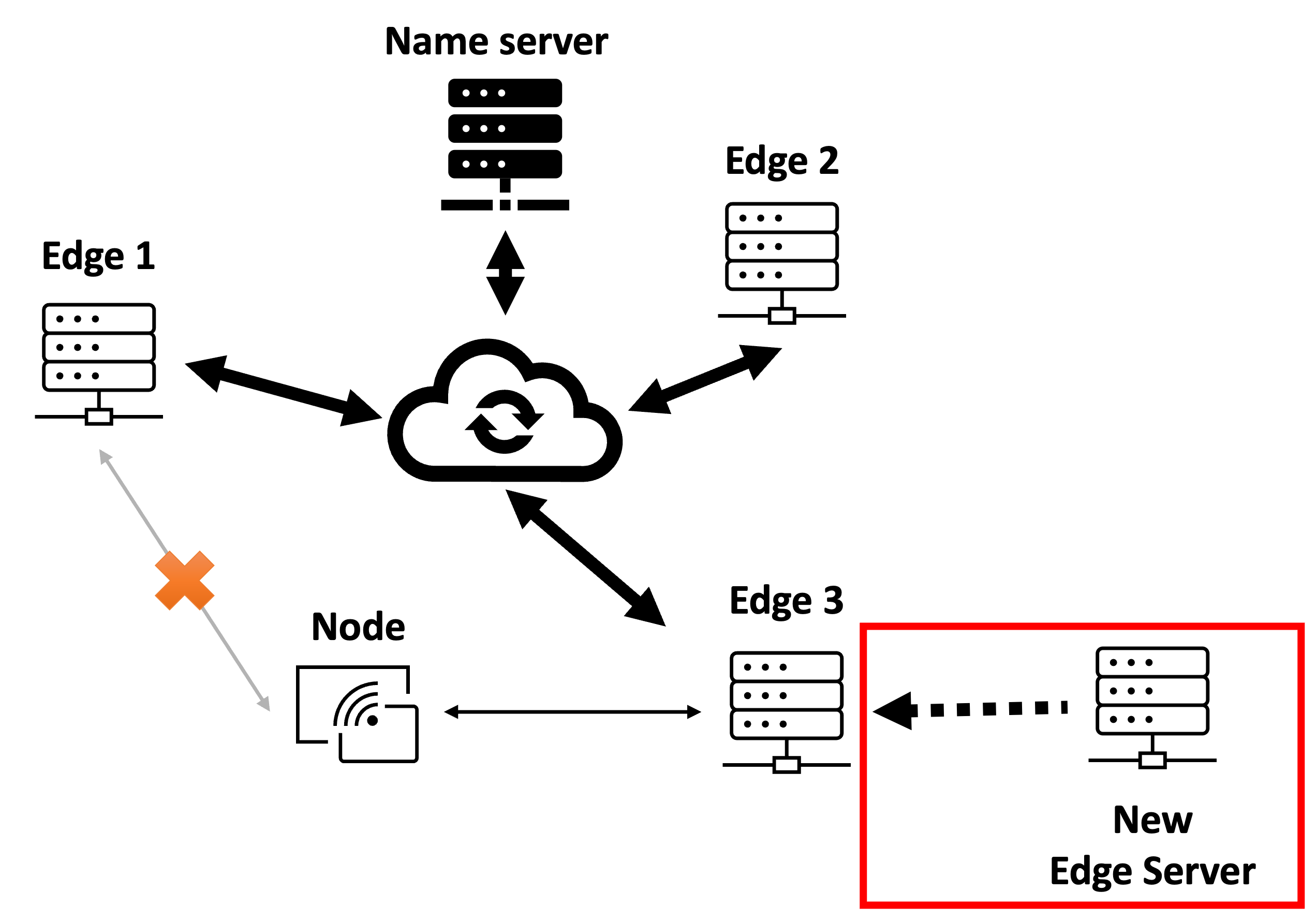
With the proliferation of Internet of Things (IoT) devices, ensuring secure communications has become imperative. Due to their low cost and embedded nature, many of these devices operate with computational and energy constraints, neglecting the potential security vulnerabilities that they may bring. This work-in-progress is focused on designing secure communication among remote servers and embedded IoT devices to balance security robustness and energy efficiency. The proposed approach uses lightweight cryptography, optimizing device performance and security without overburdening their limited resources. Our architecture stands out for integrating Edge servers and a central Name Server, allowing secure and decentralized authentication and efficient connection transitions between different Edge servers. This architecture enhances the scalability of the IoT network and reduces the load on each server, distributing the responsibility for authentication and key management.
Read more4/10/2024

0
SafeTail: Efficient Tail Latency Optimization in Edge Service Scheduling via Computational Redundancy Management
Jyoti Shokhanda, Utkarsh Pal, Aman Kumar, Soumi Chattopadhyay, Arani Bhattacharya
Optimizing tail latency while efficiently managing computational resources is crucial for delivering high-performance, latency-sensitive services in edge computing. Emerging applications, such as augmented reality, require low-latency computing services with high reliability on user devices, which often have limited computational capabilities. Consequently, these devices depend on nearby edge servers for processing. However, inherent uncertainties in network and computation latencies stemming from variability in wireless networks and fluctuating server loads make service delivery on time challenging. Existing approaches often focus on optimizing median latency but fall short of addressing the specific challenges of tail latency in edge environments, particularly under uncertain network and computational conditions. Although some methods do address tail latency, they typically rely on fixed or excessive redundancy and lack adaptability to dynamic network conditions, often being designed for cloud environments rather than the unique demands of edge computing. In this paper, we introduce SafeTail, a framework that meets both median and tail response time targets, with tail latency defined as latency beyond the 90^th percentile threshold. SafeTail addresses this challenge by selectively replicating services across multiple edge servers to meet target latencies. SafeTail employs a reward-based deep learning framework to learn optimal placement strategies, balancing the need to achieve target latencies with minimizing additional resource usage. Through trace-driven simulations, SafeTail demonstrated near-optimal performance and outperformed most baseline strategies across three diverse services.
Read more9/2/2024