SALVe: Semantic Alignment Verification for Floorplan Reconstruction from Sparse Panoramas

0
Sign in to get full access
Overview
- This paper presents SALVe, a method for reconstructing floorplans from sparse panoramic images.
- The key innovation is the use of semantic alignment verification to ensure the reconstructed floorplan is consistent with the visual input.
- The method demonstrates improved floorplan reconstruction accuracy compared to prior approaches, particularly in challenging environments with sparse or incomplete data.
Plain English Explanation
Building accurate 3D models of indoor spaces from camera images is an important problem with many applications, like virtual tours and smart home systems. However, this is a difficult task, especially when only a limited number of panoramic photos are available.
The researchers developed a new technique called SALVe that can reconstruct detailed floorplans from these sparse panoramic images. The core idea is to not just rely on the geometric information in the photos, but also use the semantic content - things like walls, doors, furniture, etc. This semantic information helps the system verify that the reconstructed 3D model aligns properly with what's visible in the images.
By combining geometric and semantic understanding, SALVe is able to generate more accurate floorplans, even in cases where there are gaps or inconsistencies in the original photo data. This is a significant improvement over previous approaches that struggled with sparse or incomplete inputs.
The SPVLoc and Fully Geometric Panoramic Localization papers explored using panoramic images for 3D reconstruction, while the SA-GS and Semantic Segmentation Guided Approach works demonstrated the benefits of incorporating semantic understanding. SALVe builds on these ideas to create a more robust floorplan reconstruction system.
Technical Explanation
The key components of the SALVe approach are:
-
Panorama Preprocessing: The input panoramic images are first processed to extract visual features and semantic segmentation information.
-
Floorplan Hypothesis Generation: Based on the extracted visual and semantic data, the system generates multiple candidate floorplan hypotheses.
-
Semantic Alignment Verification: A novel semantic alignment verification module is used to assess how well each floorplan hypothesis aligns with the observed semantics in the panoramic images.
-
Floorplan Optimization: The top-scoring floorplan hypothesis is further refined through an optimization process to produce the final reconstructed model.
The semantic alignment verification is a critical part of the system. It compares the semantic elements detected in the panoramas (e.g. walls, doors, furniture) against the predicted geometry of each floorplan hypothesis. Hypotheses that better match the observed semantics are scored higher.
This semantic alignment check helps the system overcome limitations of purely geometry-based reconstruction, especially when dealing with sparse or incomplete panoramic data. By considering both the visual appearance and semantic content, SALVe is able to produce more accurate and reliable floorplan models.
The paper demonstrates the effectiveness of this approach through experiments on several indoor floorplan datasets, showing significant improvements over prior state-of-the-art methods, particularly in challenging scenarios.
Critical Analysis
The authors acknowledge several limitations of the current SALVe approach:
- The system assumes a Manhattan-world environment, where walls and floors form orthogonal planes. This may not hold true for all indoor spaces.
- The semantic segmentation used as input relies on pre-trained models, which could degrade performance in novel environments.
- The optimization process to refine the floorplan hypotheses is computationally expensive, potentially limiting scalability.
Additionally, while the paper demonstrates improved reconstruction accuracy, there may be opportunities to further enhance the method. For example, incorporating additional data sources like laser scans or depth sensors could provide richer input for the semantic alignment verification.
The authors also do not explore the potential for interactive or user-guided refinement of the reconstructed floorplans, which could be a valuable feature for practical applications.
Overall, the SALVe approach represents a significant step forward in leveraging both geometric and semantic information for robust floorplan reconstruction. However, there are still avenues for further research and development to address the remaining challenges.
Conclusion
This paper presents SALVe, a novel method for reconstructing detailed floorplans from sparse panoramic images. The key innovation is the use of semantic alignment verification to ensure the reconstructed geometry is consistent with the observed visual and semantic content of the input data.
By combining geometric and semantic understanding, SALVe demonstrates improved floorplan reconstruction accuracy compared to prior state-of-the-art techniques, particularly in challenging environments with limited or incomplete input data. This advancement has important implications for applications like virtual tours, smart home systems, and indoor mapping.
While the current approach has some limitations, the research represents an important step towards more robust and reliable 3D reconstruction from real-world visual data. Further enhancements, such as incorporating additional sensor modalities and enabling interactive user refinement, could further expand the practical utility of this technology.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
SALVe: Semantic Alignment Verification for Floorplan Reconstruction from Sparse Panoramas
John Lambert, Yuguang Li, Ivaylo Boyadzhiev, Lambert Wixson, Manjunath Narayana, Will Hutchcroft, James Hays, Frank Dellaert, Sing Bing Kang
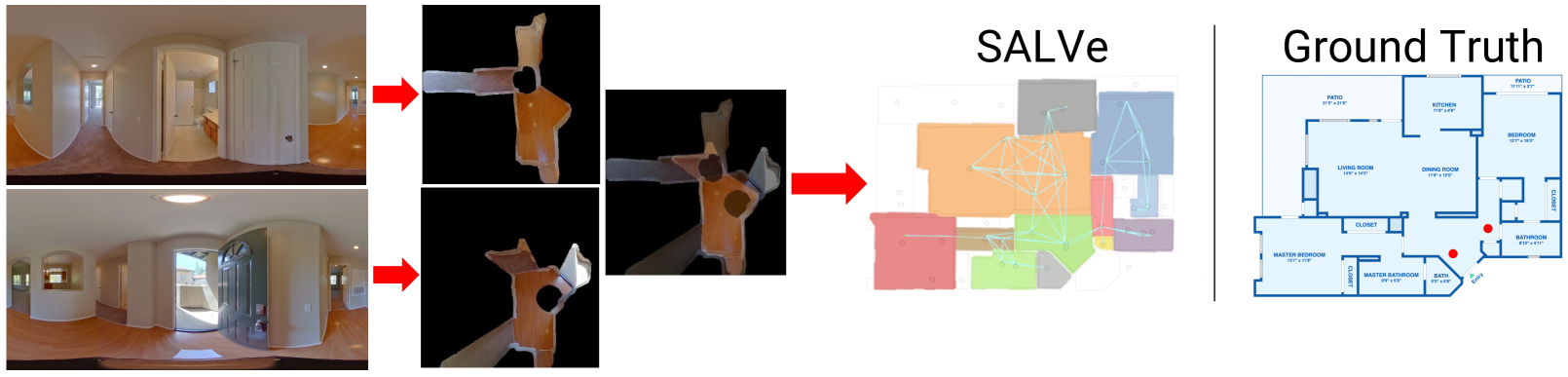
We propose a new system for automatic 2D floorplan reconstruction that is enabled by SALVe, our novel pairwise learned alignment verifier. The inputs to our system are sparsely located 360$^circ$ panoramas, whose semantic features (windows, doors, and openings) are inferred and used to hypothesize pairwise room adjacency or overlap. SALVe initializes a pose graph, which is subsequently optimized using GTSAM. Once the room poses are computed, room layouts are inferred using HorizonNet, and the floorplan is constructed by stitching the most confident layout boundaries. We validate our system qualitatively and quantitatively as well as through ablation studies, showing that it outperforms state-of-the-art SfM systems in completeness by over 200%, without sacrificing accuracy. Our results point to the significance of our work: poses of 81% of panoramas are localized in the first 2 connected components (CCs), and 89% in the first 3 CCs. Code and models are publicly available at https://github.com/zillow/salve.
Read more6/28/2024
0
SPVLoc: Semantic Panoramic Viewport Matching for 6D Camera Localization in Unseen Environments
Niklas Gard, Anna Hilsmann, Peter Eisert
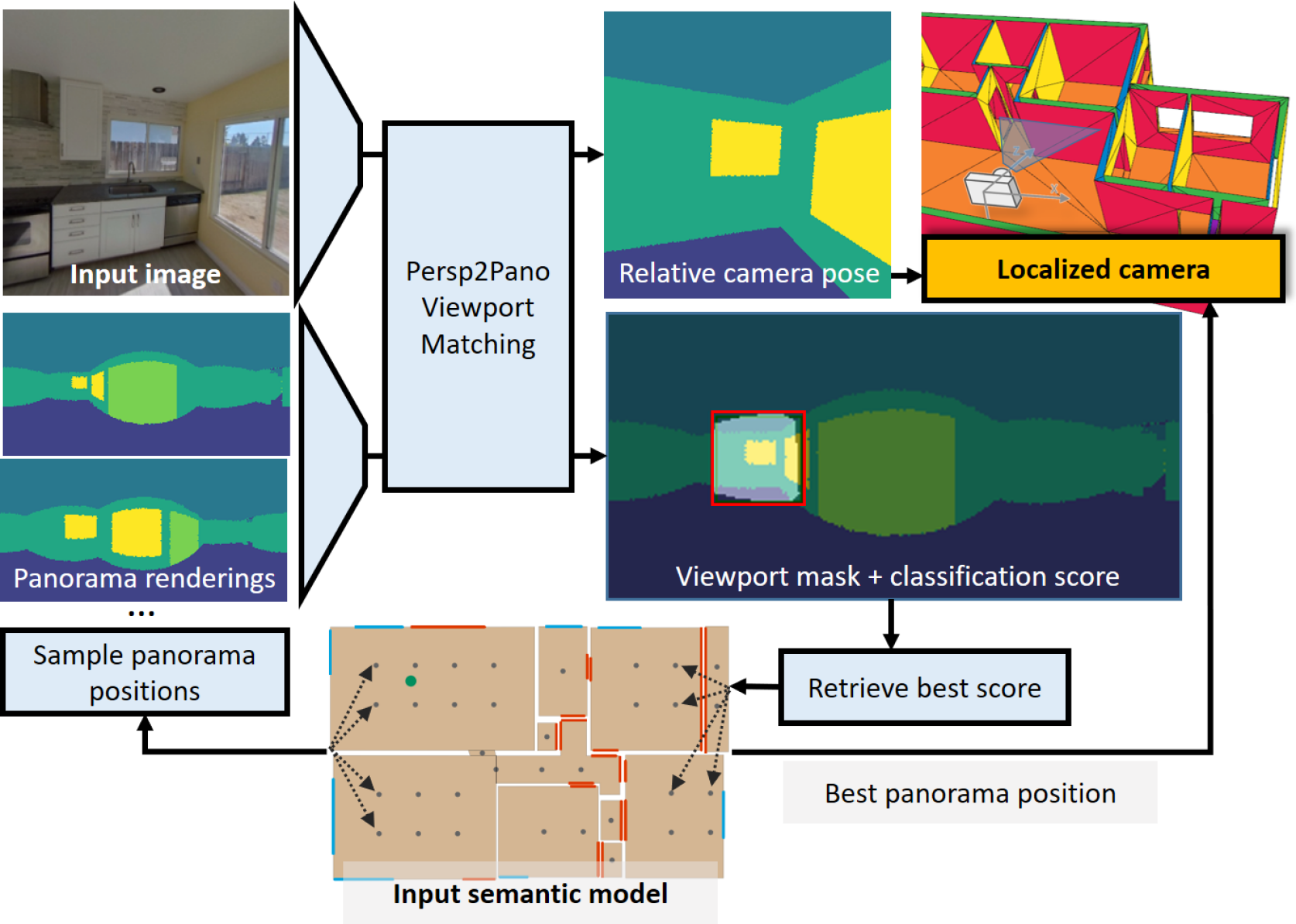
In this paper, we present SPVLoc, a global indoor localization method that accurately determines the six-dimensional (6D) camera pose of a query image and requires minimal scene-specific prior knowledge and no scene-specific training. Our approach employs a novel matching procedure to localize the perspective camera's viewport, given as an RGB image, within a set of panoramic semantic layout representations of the indoor environment. The panoramas are rendered from an untextured 3D reference model, which only comprises approximate structural information about room shapes, along with door and window annotations. We demonstrate that a straightforward convolutional network structure can successfully achieve image-to-panorama and ultimately image-to-model matching. Through a viewport classification score, we rank reference panoramas and select the best match for the query image. Then, a 6D relative pose is estimated between the chosen panorama and query image. Our experiments demonstrate that this approach not only efficiently bridges the domain gap but also generalizes well to previously unseen scenes that are not part of the training data. Moreover, it achieves superior localization accuracy compared to the state of the art methods and also estimates more degrees of freedom of the camera pose. Our source code is publicly available at https://fraunhoferhhi.github.io/spvloc .
Read more7/23/2024

0
Pano2Room: Novel View Synthesis from a Single Indoor Panorama
Guo Pu, Yiming Zhao, Zhouhui Lian
Recent single-view 3D generative methods have made significant advancements by leveraging knowledge distilled from extensive 3D object datasets. However, challenges persist in the synthesis of 3D scenes from a single view, primarily due to the complexity of real-world environments and the limited availability of high-quality prior resources. In this paper, we introduce a novel approach called Pano2Room, designed to automatically reconstruct high-quality 3D indoor scenes from a single panoramic image. These panoramic images can be easily generated using a panoramic RGBD inpainter from captures at a single location with any camera. The key idea is to initially construct a preliminary mesh from the input panorama, and iteratively refine this mesh using a panoramic RGBD inpainter while collecting photo-realistic 3D-consistent pseudo novel views. Finally, the refined mesh is converted into a 3D Gaussian Splatting field and trained with the collected pseudo novel views. This pipeline enables the reconstruction of real-world 3D scenes, even in the presence of large occlusions, and facilitates the synthesis of photo-realistic novel views with detailed geometry. Extensive qualitative and quantitative experiments have been conducted to validate the superiority of our method in single-panorama indoor novel synthesis compared to the state-of-the-art. Our code and data are available at url{https://github.com/TrickyGo/Pano2Room}.
Read more8/28/2024
0
Fully Geometric Panoramic Localization
Junho Kim, Jiwon Jeong, Young Min Kim
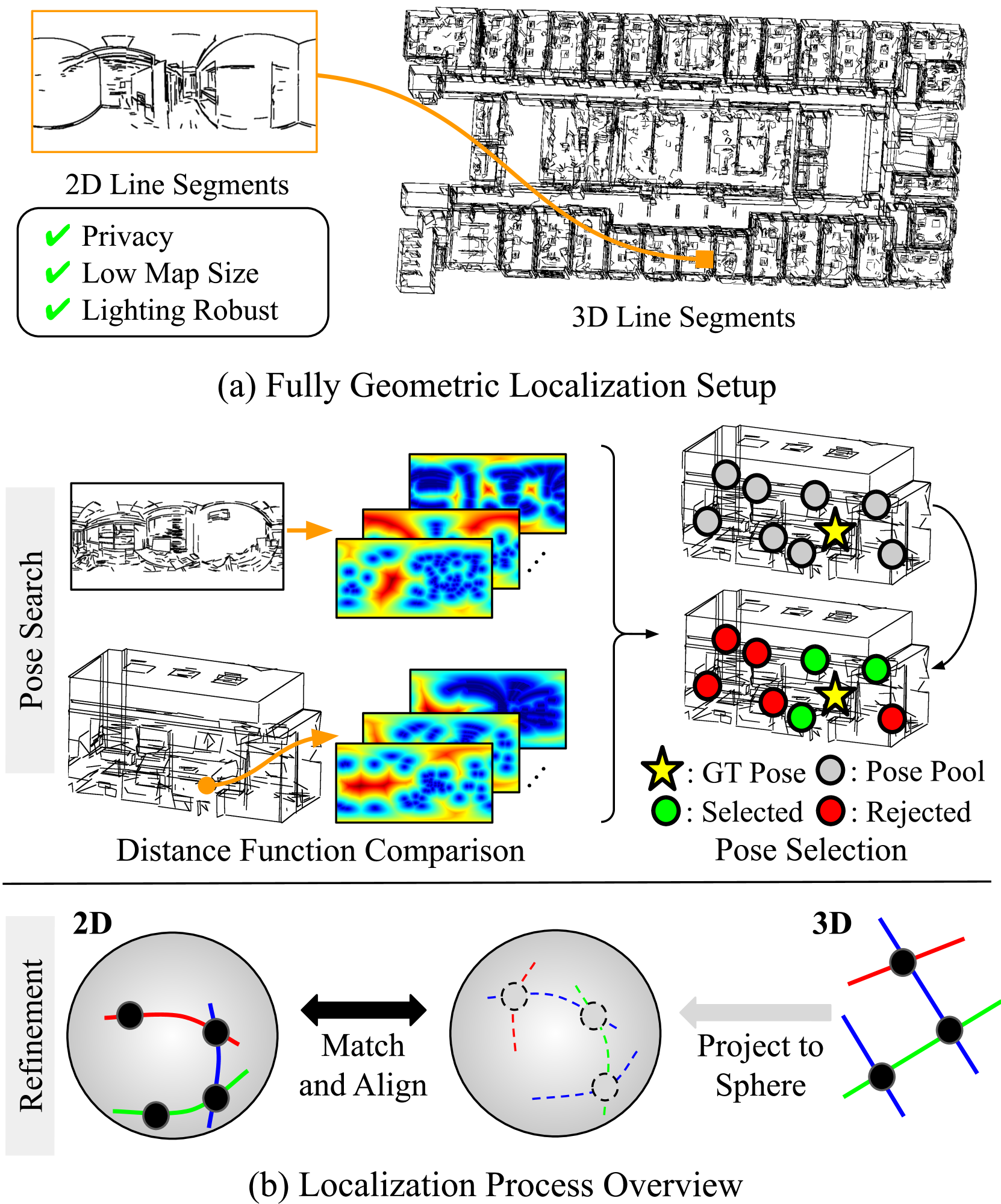
We introduce a lightweight and accurate localization method that only utilizes the geometry of 2D-3D lines. Given a pre-captured 3D map, our approach localizes a panorama image, taking advantage of the holistic 360 view. The system mitigates potential privacy breaches or domain discrepancies by avoiding trained or hand-crafted visual descriptors. However, as lines alone can be ambiguous, we express distinctive yet compact spatial contexts from relationships between lines, namely the dominant directions of parallel lines and the intersection between non-parallel lines. The resulting representations are efficient in processing time and memory compared to conventional visual descriptor-based methods. Given the groups of dominant line directions and their intersections, we accelerate the search process to test thousands of pose candidates in less than a millisecond without sacrificing accuracy. We empirically show that the proposed 2D-3D matching can localize panoramas for challenging scenes with similar structures, dramatic domain shifts or illumination changes. Our fully geometric approach does not involve extensive parameter tuning or neural network training, making it a practical algorithm that can be readily deployed in the real world. Project page including the code is available through this link: https://82magnolia.github.io/fgpl/.
Read more4/1/2024