Sampling-Based Hierarchical Trajectory Planning for Formation Flight

0

Sign in to get full access
Overview
- The paper explores a hierarchical approach to trajectory planning for multi-UAV formation flight with obstacle avoidance.
- It proposes a sampling-based planning algorithm that operates at two levels: a global level to plan a reference formation trajectory, and a local level to generate collision-free trajectories for individual UAVs.
- The algorithm aims to maintain the desired formation while navigating through complex environments with obstacles.
Plain English Explanation
The research paper presents a method for planning the trajectories of a group of unmanned aerial vehicles (UAVs) flying in a formation. The key idea is to use a two-level approach:
- At the global level, the algorithm plans a reference trajectory for the entire formation to follow, taking into account the desired formation shape and any obstacles in the environment.
- At the local level, the algorithm then generates individual trajectories for each UAV to follow the global reference while avoiding collisions with each other and the obstacles.
This hierarchical structure allows the system to maintain the formation while navigating complex environments, balancing the need for collective motion and individual maneuverability. The authors demonstrate the effectiveness of their approach through simulations and experiments.
Technical Explanation
The paper proposes a sampling-based hierarchical trajectory planning approach for multi-UAV formation flight with obstacle avoidance.
At the global level, the algorithm uses a sampling-based planner to generate a reference trajectory for the entire formation. This trajectory aims to maintain the desired formation shape while navigating through the environment and avoiding obstacles.
At the local level, the algorithm then generates individual trajectories for each UAV to follow the global reference. This is done using a sampling-based planner that takes into account the current positions and velocities of the UAVs, as well as the obstacle locations, to plan collision-free paths for each vehicle.
The two-level structure allows the system to balance the need for collective motion (following the global reference) and individual maneuverability (the local planning). The authors validate their approach through simulations and experiments, demonstrating the ability to maintain formation while successfully avoiding obstacles.
Critical Analysis
The paper presents a well-designed approach to the challenging problem of multi-UAV formation flight with obstacle avoidance. The hierarchical structure is a reasonable and intuitive way to address the competing requirements of collective and individual motion.
However, the authors do not discuss the potential limitations of their approach. For example, the performance of the algorithm may degrade in highly dynamic environments with rapidly changing obstacles or when the formation needs to make sharp turns. Additionally, the scalability of the approach as the number of UAVs increases is not addressed.
Further research could explore ways to make the algorithm more robust to dynamic environments, as well as investigate techniques to improve its computational efficiency and scalability. Incorporating more advanced decision-making capabilities, such as the ability to adaptively adjust the formation shape based on the environment, could also be a fruitful direction for future work.
Conclusion
The paper presents a sampling-based hierarchical trajectory planning approach for multi-UAV formation flight with obstacle avoidance. By separating the planning into global and local levels, the algorithm is able to effectively maintain the desired formation while navigating complex environments.
The findings of this research could have important implications for the development of autonomous aerial systems, particularly in applications where coordinated multi-UAV operations are required, such as search and rescue, surveillance, and cargo transport. Further refinements and extensions of this approach could lead to even more robust and capable formation flight algorithms.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Sampling-Based Hierarchical Trajectory Planning for Formation Flight
Qingzhao Liu, Bailing Tian, Xuewei Zhang, Junjie Lu, Zhiyu Li
Formation flight of unmanned aerial vehicles (UAVs) poses significant challenges in terms of safety and formation keeping, particularly in cluttered environments. However, existing methods often struggle to simultaneously satisfy these two critical requirements. To address this issue, this paper proposes a sampling-based trajectory planning method with a hierarchical structure for formation flight in dense obstacle environments. To ensure reliable local sensing information sharing among UAVs, each UAV generates a safe flight corridor (SFC), which is transmitted to the leader UAV. Subsequently, a sampling-based formation guidance path generation method is designed as the front-end strategy, steering the formation to fly in the desired shape safely with the formation connectivity provided by the SFCs. Furthermore, a model predictive path integral (MPPI) based distributed trajectory optimization method is developed as the back-end part, which ensures the smoothness, safety and dynamics feasibility of the executable trajectory. To validate the efficiency of the developed algorithm, comprehensive simulation comparisons are conducted. The supplementary simulation video can be seen at https://www.youtube.com/watch?v=xSxbUN0tn1M.
Read more7/25/2024
0
Model-Predictive Trajectory Generation for Autonomous Aerial Search and Coverage
Hugo Matias, Daniel Silvestre
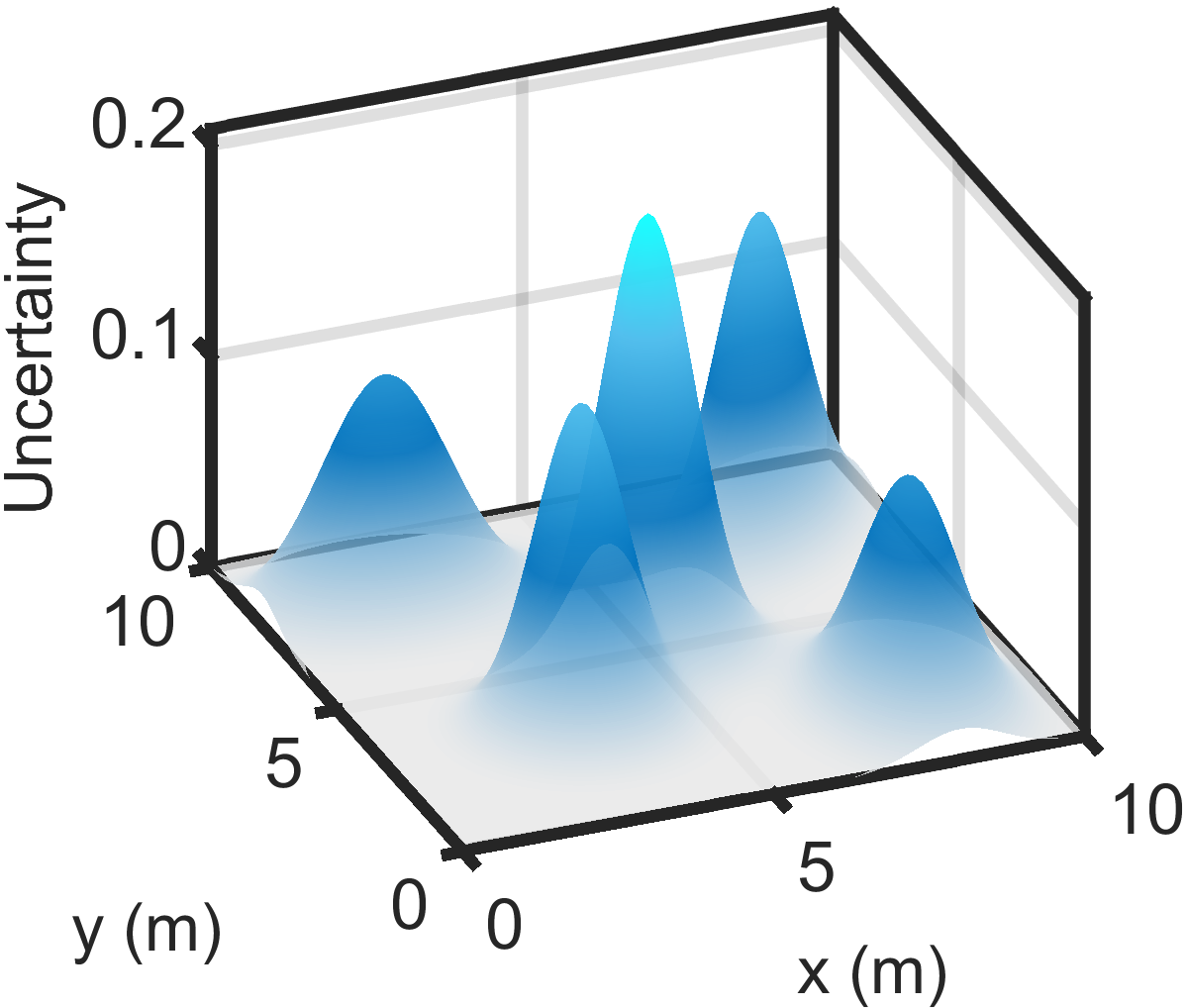
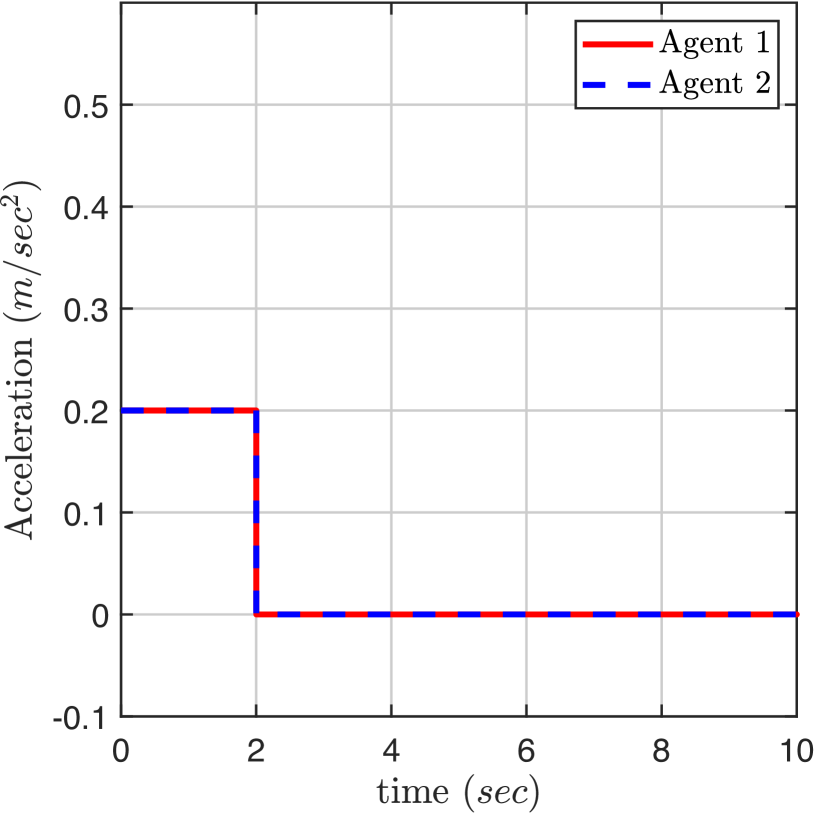
This paper addresses the trajectory planning problem for search and coverage missions with an Unmanned Aerial Vehicle (UAV). The objective is to devise optimal coverage trajectories based on a utility map describing prior region information, assumed to be effectively approximated by a Gaussian Mixture Model (GMM). We introduce a Model Predictive Control (MPC) algorithm employing a relaxed formulation that promotes the exploration of the map by preventing the UAV from revisiting previously covered areas. This is achieved by penalizing intersections between the UAV's visibility regions along its trajectory. The algorithm is assessed in MATLAB and validated in Gazebo, as well as in outdoor experimental tests. The results show that the proposed strategy can generate efficient and smooth trajectories for search and coverage missions.
Read more4/8/2024

0
UAV Trajectory Planning with Path Processing
Zdenv{e}k Bouv{c}ek, Miroslav Fl'idr, Ondv{r}ej Straka
This paper examines the influence of initial guesses on trajectory planning for Unmanned Aerial Vehicles (UAVs) formulated in terms of Optimal Control Problem (OCP). The OCP is solved numerically using the Pseudospectral collocation method. Our approach leverages a path identified through Lazy Theta* and incorporates known constraints and a model of the UAV's behavior for the initial guess. Our findings indicate that a suitable initial guess has a beneficial influence on the planned trajectory. They also suggest promising directions for future research.
Read more7/2/2024
0
Safety-Critical Formation Control of Non-Holonomic Multi-Robot Systems in Communication-Limited Environments
Vishrut Bohara, Siavash Farzan
This paper presents a robust estimator-based safety-critical controller for formation control of non-holonomic mobile robots in communication-limited environments. The proposed decentralized framework integrates a robust state estimator with a formation tracking control law that guarantees inter-agent collision avoidance using control barrier functions. String stability is incorporated into the control design to maintain stability against noise from predecessors in leader-follower formations. Rigorous stability analysis using Lyapunov functions ensures the stability of estimation errors and the convergence of the formation to desired configurations. The effectiveness and robustness of the proposed approach are validated through numerical simulations of various maneuvers and realistic Gazebo experiments involving formations in a warehouse environment. The results demonstrate the controller's ability to maintain safety, achieve precise formation control, and mitigate disturbances in scenarios without inter-robot communication.
Read more6/21/2024