CoViS-Net: A Cooperative Visual Spatial Foundation Model for Multi-Robot Applications

0
Sign in to get full access
Overview
- This paper introduces CoViS-Net, a novel cooperative visual spatial foundation model for multi-robot applications.
- CoViS-Net aims to enable efficient and robust multi-robot collaboration by providing a shared spatial understanding among robots.
- The model leverages large-scale training data and self-supervised learning to build a rich, generalizable representation of the visual environment.
- CoViS-Net can be used for various multi-robot tasks, such as navigation, object manipulation, and scene understanding.
Plain English Explanation
CoViS-Net is a new type of AI system that helps multiple robots work together more effectively. The key idea is to give the robots a shared understanding of the visual environment they're operating in. This can be useful for robots working together on tasks like navigation, object handling, or understanding a scene.
Typically, each robot would have to build its own internal representation of the world based on what its own sensors can perceive. CoViS-Net takes a different approach - it trains a single, powerful AI model on a huge amount of visual data, allowing it to build a rich, generalized understanding of the world. This shared model can then be used by multiple robots, giving them a common frame of reference.
The researchers use advanced machine learning techniques, like self-supervised learning, to train CoViS-Net without the need for extensive manual labeling of data. This makes the system more scalable and flexible than previous approaches.
By providing this shared visual-spatial understanding, CoViS-Net aims to enable robots to collaborate more seamlessly, coordinating their actions and perceiving the world in a more aligned way. This could lead to significant improvements in the performance of multi-robot systems for a variety of real-world applications.
Technical Explanation
CoViS-Net is a cooperative visual spatial foundation model designed to enable efficient multi-robot collaboration. The key innovation of the model is its ability to build a shared, generalizable representation of the visual environment that can be leveraged by multiple robots.
The researchers utilize large-scale training data and self-supervised learning techniques to train CoViS-Net. This allows the model to learn a rich, multi-modal understanding of the visual world without the need for extensive manual labeling. The resulting representation captures semantic, geometric, and relational information about the environment.
CoViS-Net's architecture consists of a deep convolutional neural network backbone that encodes visual input into a high-dimensional feature space. This feature representation is then used to perform a variety of downstream tasks, such as object detection, surface normal estimation, and camera pose regression.
One of the key advantages of CoViS-Net is its ability to generalize across different environments and scenarios. By training on diverse data, the model develops a robust and adaptable understanding of the visual world, which can be leveraged by multiple robots operating in various settings.
The researchers demonstrate the effectiveness of CoViS-Net through a series of experiments on benchmark multi-robot datasets. The results show significant improvements in task performance, including navigation, object manipulation, and scene understanding, compared to previous approaches.
Critical Analysis
The CoViS-Net paper presents a promising approach to enhancing multi-robot collaboration through shared visual-spatial understanding. However, the authors acknowledge several limitations and areas for further research.
One potential concern is the scalability of the system as the number of robots increases. The authors mention that the current implementation may face computational and communication challenges when scaling to large-scale multi-robot teams. Addressing these scalability issues could be an important area for future work.
Additionally, the paper focuses primarily on simulated environments and synthetic datasets. While this allows for controlled experiments and performance evaluation, it remains to be seen how well CoViS-Net will translate to real-world, unstructured environments. Validating the model's performance in more realistic settings could be a valuable next step.
The authors also note that the current version of CoViS-Net does not explicitly address dynamic or changing environments. Enhancing the model's ability to adapt to evolving scenes and handle temporal changes could further improve its applicability in real-world multi-robot scenarios.
Conclusion
The CoViS-Net paper introduces a novel cooperative visual spatial foundation model that aims to enable efficient and robust multi-robot collaboration. By providing a shared, generalizable representation of the visual environment, the model allows multiple robots to develop a common understanding of their surroundings, which can be leveraged for a variety of tasks.
The researchers demonstrate promising results through extensive experiments, showcasing the potential of CoViS-Net to significantly improve the performance of multi-robot systems. While the paper identifies several areas for future work, the overall approach represents an important step forward in enhancing the capabilities of cooperative robotic systems.
As the field of multi-robot applications continues to evolve, the insights and techniques presented in the CoViS-Net paper could have far-reaching implications for a wide range of real-world applications, from autonomous navigation and object manipulation to collaborative task planning and environmental monitoring.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
CoViS-Net: A Cooperative Visual Spatial Foundation Model for Multi-Robot Applications
Jan Blumenkamp, Steven Morad, Jennifer Gielis, Amanda Prorok
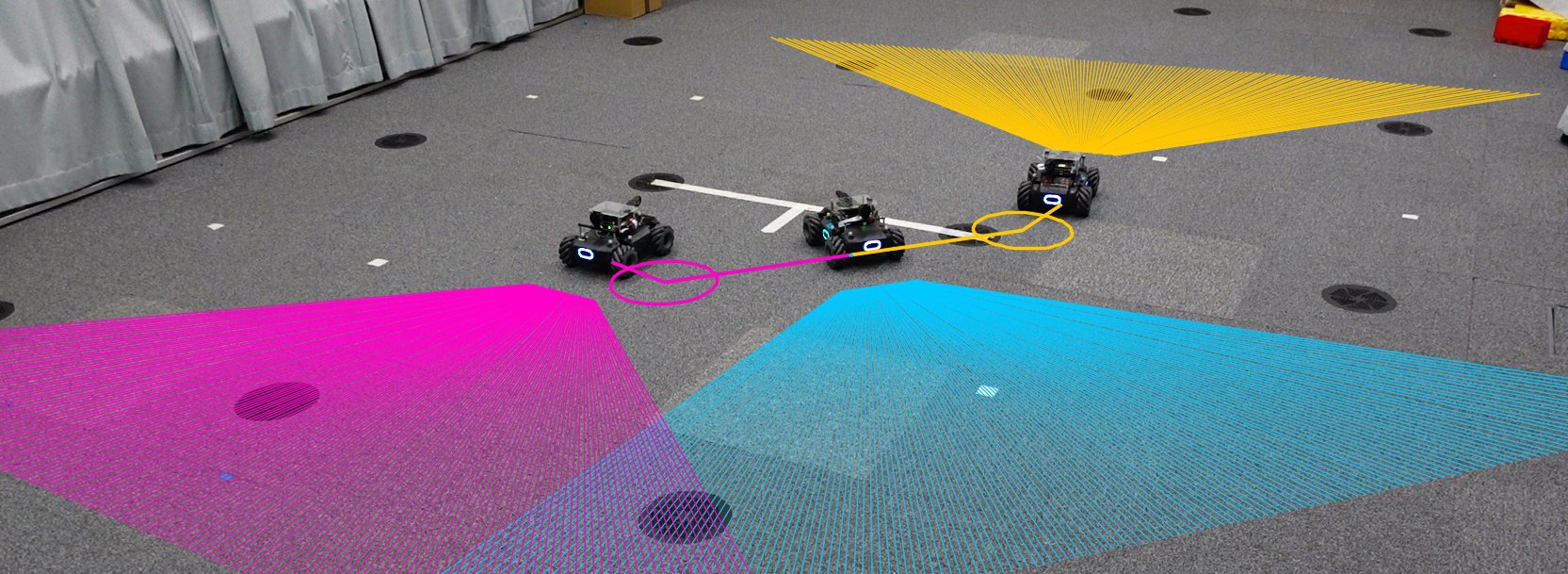
Autonomous robot operation in unstructured environments is often underpinned by spatial understanding through vision. Systems composed of multiple concurrently operating robots additionally require access to frequent, accurate and reliable pose estimates. Classical vision-based methods to regress relative pose are commonly computationally expensive (precluding real-time applications), and often lack data-derived priors for resolving ambiguities. In this work, we propose CoViS-Net, a cooperative, multi-robot visual spatial foundation model that learns spatial priors from data, enabling pose estimation as well as general spatial comprehension. Our model is fully decentralized, platform-agnostic, executable in real-time using onboard compute, and does not require existing networking infrastructure. CoViS-Net provides relative pose estimates and a local bird's-eye-view (BEV) representation, even without camera overlap between robots, and can predict BEV representations of unseen regions. We demonstrate its use in a multi-robot formation control task across various real-world settings. We provide supplementary material online and will open source our trained model in due course. https://sites.google.com/view/covis-net
Read more6/10/2024

0
Self-Localized Collaborative Perception
Zhenyang Ni, Zixing Lei, Yifan Lu, Dingju Wang, Chen Feng, Yanfeng Wang, Siheng Chen
Collaborative perception has garnered considerable attention due to its capacity to address several inherent challenges in single-agent perception, including occlusion and out-of-range issues. However, existing collaborative perception systems heavily rely on precise localization systems to establish a consistent spatial coordinate system between agents. This reliance makes them susceptible to large pose errors or malicious attacks, resulting in substantial reductions in perception performance. To address this, we propose~$mathtt{CoBEVGlue}$, a novel self-localized collaborative perception system, which achieves more holistic and robust collaboration without using an external localization system. The core of~$mathtt{CoBEVGlue}$ is a novel spatial alignment module, which provides the relative poses between agents by effectively matching co-visible objects across agents. We validate our method on both real-world and simulated datasets. The results show that i) $mathtt{CoBEVGlue}$ achieves state-of-the-art detection performance under arbitrary localization noises and attacks; and ii) the spatial alignment module can seamlessly integrate with a majority of previous methods, enhancing their performance by an average of $57.7%$. Code is available at https://github.com/VincentNi0107/CoBEVGlue
Read more6/19/2024

0
CooPre: Cooperative Pretraining for V2X Cooperative Perception
Seth Z. Zhao, Hao Xiang, Chenfeng Xu, Xin Xia, Bolei Zhou, Jiaqi Ma
Existing Vehicle-to-Everything (V2X) cooperative perception methods rely on accurate multi-agent 3D annotations. Nevertheless, it is time-consuming and expensive to collect and annotate real-world data, especially for V2X systems. In this paper, we present a self-supervised learning method for V2X cooperative perception, which utilizes the vast amount of unlabeled 3D V2X data to enhance the perception performance. Beyond simply extending the previous pre-training methods for point-cloud representation learning, we introduce a novel self-supervised Cooperative Pretraining framework (termed as CooPre) customized for a collaborative scenario. We point out that cooperative point-cloud sensing compensates for information loss among agents. This motivates us to design a novel proxy task for the 3D encoder to reconstruct LiDAR point clouds across different agents. Besides, we develop a V2X bird-eye-view (BEV) guided masking strategy which effectively allows the model to pay attention to 3D features across heterogeneous V2X agents (i.e., vehicles and infrastructure) in the BEV space. Noticeably, such a masking strategy effectively pretrains the 3D encoder and is compatible with mainstream cooperative perception backbones. Our approach, validated through extensive experiments on representative datasets (i.e., V2X-Real, V2V4Real, and OPV2V), leads to a performance boost across all V2X settings. Additionally, we demonstrate the framework's improvements in cross-domain transferability, data efficiency, and robustness under challenging scenarios. The code will be made publicly available.
Read more8/22/2024

0
PoseINN: Realtime Visual-based Pose Regression and Localization with Invertible Neural Networks
Zirui Zang, Ahmad Amine, Rahul Mangharam
Estimating ego-pose from cameras is an important problem in robotics with applications ranging from mobile robotics to augmented reality. While SOTA models are becoming increasingly accurate, they can still be unwieldy due to high computational costs. In this paper, we propose to solve the problem by using invertible neural networks (INN) to find the mapping between the latent space of images and poses for a given scene. Our model achieves similar performance to the SOTA while being faster to train and only requiring offline rendering of low-resolution synthetic data. By using normalizing flows, the proposed method also provides uncertainty estimation for the output. We also demonstrated the efficiency of this method by deploying the model on a mobile robot.
Read more5/8/2024