Self-training superconducting neuromorphic circuits using reinforcement learning rules

0
🏅
Sign in to get full access
Overview
- This research paper explores the use of reinforcement learning algorithms in superconducting hardware to implement a small-scale neural network that can learn new functions quickly.
- The key innovation is the use of local weight update rules that adjust the network's weights based on the current state and locally stored information, removing the need for explicit weight programming or error backpropagation.
- This approach enables a learning time of around 1 nanosecond, making it suitable for applications that require rapid adaptation, such as gaming and robotics, autonomous vehicles, and global optimization.
Plain English Explanation
The researchers have developed a way to train small neural networks very quickly using a process called reinforcement learning. Reinforcement learning is a type of machine learning where the network learns by trial and error, getting feedback (a "reward") when it does something right.
In this case, the researchers have implemented the reinforcement learning algorithm in superconducting hardware, which is a specialized type of electronic circuit that can operate at very fast speeds. By using this hardware, they were able to train a small neural network in about 1 nanosecond (one billionth of a second), which is incredibly fast.
The key to this fast learning is the way the network's "weights" (the strengths of the connections between the neurons) are adjusted. Instead of using a traditional method called backpropagation, which requires a lot of complex calculations, the researchers use a local update rule. This means the weights are adjusted based on the current state of the network and some stored information about the previous actions, without the need for any external programming or calculations.
This approach removes some of the main challenges faced by analog (non-digital) implementations of neural networks, which is the difficulty of precisely programming the weights. By using reinforcement learning and local updates, the network can learn and adapt on its own, making it well-suited for applications that require rapid changes, such as gaming, robotics, autonomous vehicles, and global optimization.
Technical Explanation
The researchers have implemented a reinforcement learning-based approach to training small-scale neural networks in superconducting hardware. The core innovation is the use of local weight update rules that adjust the network's weights based on the current state of the overall network response and locally stored information about the previous action.
This removes the need for explicit weight programming or the use of error backpropagation, which is one of the primary challenges faced by analog implementations of neural networks. Instead, the weights are adjusted according to a global reinforcement signal, which obviates the need for complex circuitry to propagate errors back through the network.
Through SPICE circuit simulations, the researchers demonstrate a neural network implementation with a learning time on the order of 1 nanosecond. This rapid learning capability is achieved by leveraging the speed of superconducting hardware and the efficiency of the reinforcement learning-based weight update rules.
The ability to quickly train and adapt the neural network without the need for extensive programming or external adjustments makes this approach well-suited for applications that require rapid adaptation, such as gaming, robotics, autonomous vehicles, and global optimization.
Critical Analysis
The researchers have presented a promising approach to implementing fast-learning neural networks in superconducting hardware, but there are a few caveats and areas for further research that should be considered.
One potential limitation is the scalability of the approach. The paper demonstrates the concept using a small-scale network, but it's unclear how well the local weight update rules and reinforcement learning would scale to larger, more complex networks. Additional research would be needed to understand the performance and feasibility of this approach for real-world, large-scale applications.
Another area for further exploration is the robustness and reliability of the superconducting hardware. Superconducting circuits can be sensitive to environmental factors, such as temperature and magnetic fields, which could impact the stability and reproducibility of the neural network's performance. Addressing these practical considerations would be important for real-world deployment.
Additionally, the paper does not provide a detailed comparison to other fast-learning neural network approaches, such as spiking neural networks or hardware-accelerated deep reinforcement learning. Understanding the relative strengths and weaknesses of this approach compared to alternative methods would help contextualize the significance of the research.
Overall, the researchers have presented an intriguing concept that could contribute to the development of rapidly adaptable neural networks for a variety of applications. However, further research and validation would be needed to fully assess the practical viability and scalability of this approach.
Conclusion
This research paper explores a novel approach to implementing fast-learning neural networks using reinforcement learning-based local weight update rules in superconducting hardware. The key innovation is the ability to train a small-scale neural network in around 1 nanosecond, without the need for explicit weight programming or error backpropagation.
This rapid learning capability, enabled by the efficiency of the reinforcement learning algorithm and the speed of the superconducting hardware, could make this approach well-suited for applications that require quick adaptation, such as gaming, robotics, autonomous vehicles, and global optimization. However, further research is needed to address the scalability, robustness, and practical considerations of this technology.
Overall, this research represents an interesting step forward in the development of fast-adapting neural networks that could have significant implications for a wide range of real-world applications in the future.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🏅
0
Self-training superconducting neuromorphic circuits using reinforcement learning rules
M. L. Schneider, E. M. Ju'e, M. R. Pufall, K. Segall, C. W. Anderson
Reinforcement learning algorithms are used in a wide range of applications, from gaming and robotics to autonomous vehicles. In this paper we describe a set of reinforcement learning-based local weight update rules and their implementation in superconducting hardware. Using SPICE circuit simulations, we implement a small-scale neural network with a learning time of order one nanosecond. This network can be trained to learn new functions simply by changing the target output for a given set of inputs, without the need for any external adjustments to the network. In this implementation the weights are adjusted based on the current state of the overall network response and locally stored information about the previous action. This removes the need to program explicit weight values in these networks, which is one of the primary challenges that analog hardware implementations of neural networks face. The adjustment of weights is based on a global reinforcement signal that obviates the need for circuitry to back-propagate errors.
Read more4/30/2024
0
Learning fast changing slow in spiking neural networks
Cristiano Capone, Paolo Muratore
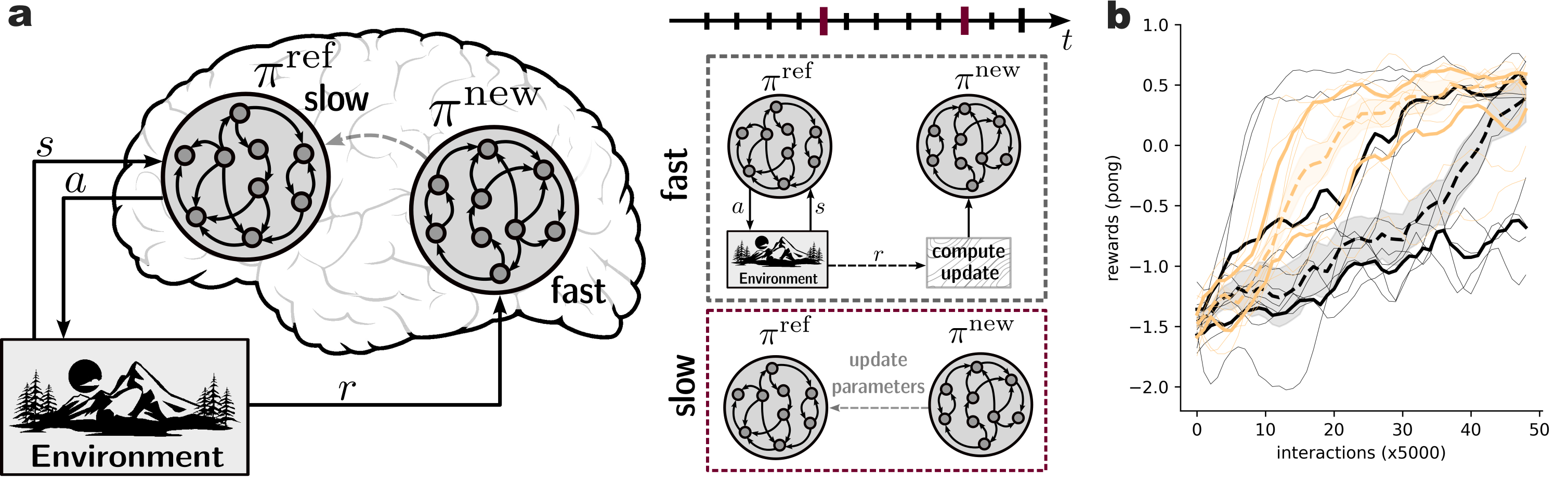
Reinforcement learning (RL) faces substantial challenges when applied to real-life problems, primarily stemming from the scarcity of available data due to limited interactions with the environment. This limitation is exacerbated by the fact that RL often demands a considerable volume of data for effective learning. The complexity escalates further when implementing RL in recurrent spiking networks, where inherent noise introduced by spikes adds a layer of difficulty. Life-long learning machines must inherently resolve the plasticity-stability paradox. Striking a balance between acquiring new knowledge and maintaining stability is crucial for artificial agents. To address this challenge, we draw inspiration from machine learning technology and introduce a biologically plausible implementation of proximal policy optimization, referred to as lf-cs (learning fast changing slow). Our approach results in two notable advancements: firstly, the capacity to assimilate new information into a new policy without requiring alterations to the current policy; and secondly, the capability to replay experiences without experiencing policy divergence. Furthermore, when contrasted with other experience replay (ER) techniques, our method demonstrates the added advantage of being computationally efficient in an online setting. We demonstrate that the proposed methodology enhances the efficiency of learning, showcasing its potential impact on neuromorphic and real-world applications.
Read more4/10/2024

0
Lifelong Reinforcement Learning via Neuromodulation
Sebastian Lee, Samuel Liebana Garcia, Claudia Clopath, Will Dabney
Navigating multiple tasks$unicode{x2014}$for instance in succession as in continual or lifelong learning, or in distributions as in meta or multi-task learning$unicode{x2014}$requires some notion of adaptation. Evolution over timescales of millennia has imbued humans and other animals with highly effective adaptive learning and decision-making strategies. Central to these functions are so-called neuromodulatory systems. In this work we introduce an abstract framework for integrating theories and evidence from neuroscience and the cognitive sciences into the design of adaptive artificial reinforcement learning algorithms. We give a concrete instance of this framework built on literature surrounding the neuromodulators Acetylcholine (ACh) and Noradrenaline (NA), and empirically validate the effectiveness of the resulting adaptive algorithm in a non-stationary multi-armed bandit problem. We conclude with a theory-based experiment proposal providing an avenue to link our framework back to efforts in experimental neuroscience.
Read more8/19/2024

0
Reinforcement learning-based architecture search for quantum machine learning
Frederic Rapp, David A. Kreplin, Marco F. Huber, Marco Roth
Quantum machine learning models use encoding circuits to map data into a quantum Hilbert space. While it is well known that the architecture of these circuits significantly influences core properties of the resulting model, they are often chosen heuristically. In this work, we present a novel approach using reinforcement learning techniques to generate problem-specific encoding circuits to improve the performance of quantum machine learning models. By specifically using a model-based reinforcement learning algorithm, we reduce the number of necessary circuit evaluations during the search, providing a sample-efficient framework. In contrast to previous search algorithms, our method uses a layered circuit structure that significantly reduces the search space. Additionally, our approach can account for multiple objectives such as solution quality, hardware restrictions and circuit depth. We benchmark our tailored circuits against various reference models, including models with problem-agnostic circuits and classical models. Our results highlight the effectiveness of problem-specific encoding circuits in enhancing QML model performance.
Read more8/9/2024