Semi-Autonomous Laparoscopic Robot Docking with Learned Hand-Eye Information Fusion

0
🎲
Sign in to get full access
Overview
- Researchers introduce a novel shared-control system for keyhole docking operations
- The system combines a commercial camera, occlusion-robust pose estimation, and hand-eye information fusion
- This enhances docking precision and force-compliance safety
- The system is evaluated through real-world phantom experiments
Plain English Explanation
The researchers have developed a new system to help with a specific type of robotic operation called "keyhole docking." This involves precisely maneuvering a robotic tool through a small opening to perform a task.
The key aspects of their system are:
-
Camera and Pose Estimation: They use a commercial camera along with a new method for estimating the position and orientation of the robot's tool, even when it is partially obscured.
-
Hand-Eye Fusion: The system also fuses information from the camera with data from sensors on the robot's "hand" (the tool) to get a more accurate understanding of the tool's position and movements.
-
Training and Evaluation: The researchers trained a machine learning model using a self-supervised dataset generated by their docking system. In real-world tests, this improved the precision and stability of the robot's movements compared to other approaches.
The goal is to enhance the safety and effectiveness of these types of minimally invasive robotic procedures, which have applications beyond just laparoscopic surgery. The researchers believe their anti-interference, steady, and precise solution could be useful for a variety of delicate robotic operations.
Technical Explanation
The researchers developed a novel shared-control system for keyhole docking operations, combining a commercial camera with an occlusion-robust pose estimation technique and a hand-eye information fusion approach.
To train the hand-eye fusion network model, they generated a self-supervised dataset using their docking system. After training, the pose estimation method showed improved accuracy compared to traditional techniques like observation-only approaches, hand-eye calibration, and conventional state estimation filters.
In real-world phantom experiments, the researchers' approach demonstrated reduced position and force dispersion compared to a control group. These advancements in semi-autonomy co-manipulation scenarios are intended to enhance interaction and stability for procedures like laparoscopic surgery and other minimally invasive operations, potentially including unknown object grasping and multimodal human-robot collaboration.
Critical Analysis
The paper provides a thorough evaluation of the researchers' shared-control system, including comparisons to other state-of-the-art approaches. However, the experiments were limited to phantom tests, and the researchers acknowledge the need for further validation in real clinical settings.
Additionally, the paper does not delve into the specific neural network architecture or training process for the hand-eye fusion model. More details on the model design and hyperparameter tuning would be helpful for researchers interested in replicating or building upon this work.
Overall, the researchers have presented a promising solution for enhancing the precision and safety of robotic keyhole docking procedures. Further real-world testing and model refinements could strengthen the practical applicability of this approach.
Conclusion
This study introduces a novel shared-control system for keyhole docking operations, combining a commercial camera, occlusion-robust pose estimation, and a hand-eye information fusion technique. Through real-world phantom experiments, the researchers demonstrated improved docking precision and force-compliance safety compared to traditional methods.
The system's advancements in semi-autonomy co-manipulation have the potential to enhance the stability and interaction of minimally invasive procedures, with applications beyond just laparoscopic surgery. Further validation in clinical settings and additional details on the model architecture could help strengthen the practical impact of this research.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🎲
0
Semi-Autonomous Laparoscopic Robot Docking with Learned Hand-Eye Information Fusion
Huanyu Tian, Martin Huber, Christopher E. Mower, Zhe Han, Changsheng Li, Xingguang Duan, Christos Bergeles
In this study, we introduce a novel shared-control system for key-hole docking operations, combining a commercial camera with occlusion-robust pose estimation and a hand-eye information fusion technique. This system is used to enhance docking precision and force-compliance safety. To train a hand-eye information fusion network model, we generated a self-supervised dataset using this docking system. After training, our pose estimation method showed improved accuracy compared to traditional methods, including observation-only approaches, hand-eye calibration, and conventional state estimation filters. In real-world phantom experiments, our approach demonstrated its effectiveness with reduced position dispersion (1.23pm 0.81 mm vs. 2.47 pm 1.22 mm) and force dispersion (0.78pm 0.57 N vs. 1.15 pm 0.97 N) compared to the control group. These advancements in semi-autonomy co-manipulation scenarios enhance interaction and stability. The study presents an anti-interference, steady, and precision solution with potential applications extending beyond laparoscopic surgery to other minimally invasive procedures.
Read more5/10/2024

0
Multi-Camera Hand-Eye Calibration for Human-Robot Collaboration in Industrial Robotic Workcells
Davide Allegro, Matteo Terreran, Stefano Ghidoni
In industrial scenarios, effective human-robot collaboration relies on multi-camera systems to robustly monitor human operators despite the occlusions that typically show up in a robotic workcell. In this scenario, precise localization of the person in the robot coordinate system is essential, making the hand-eye calibration of the camera network critical. This process presents significant challenges when high calibration accuracy should be achieved in short time to minimize production downtime, and when dealing with extensive camera networks used for monitoring wide areas, such as industrial robotic workcells. Our paper introduces an innovative and robust multi-camera hand-eye calibration method, designed to optimize each camera's pose relative to both the robot's base and to each other camera. This optimization integrates two types of key constraints: i) a single board-to-end-effector transformation, and ii) the relative camera-to-camera transformations. We demonstrate the superior performance of our method through comprehensive experiments employing the METRIC dataset and real-world data collected on industrial scenarios, showing notable advancements over state-of-the-art techniques even using less than 10 images. Additionally, we release an open-source version of our multi-camera hand-eye calibration algorithm at https://github.com/davidea97/Multi-Camera-Hand-Eye-Calibration.git.
Read more6/18/2024

0
A three-dimensional force estimation method for the cable-driven soft robot based on monocular images
Xiaohan Zhu, Ran Bu, Zhen Li, Fan Xu, Hesheng Wang
Soft manipulators are known for their superiority in coping with high-safety-demanding interaction tasks, e.g., robot-assisted surgeries, elderly caring, etc. Yet the challenges residing in real-time contact feedback have hindered further applications in precise manipulation. This paper proposes an end-to-end network to estimate the 3D contact force of the soft robot, with the aim of enhancing its capabilities in interactive tasks. The presented method features directly utilizing monocular images fused with multidimensional actuation information as the network inputs. This approach simplifies the preprocessing of raw data compared to related studies that utilize 3D shape information for network inputs, consequently reducing configuration reconstruction errors. The unified feature representation module is devised to elevate low-dimensional features from the system's actuation signals to the same level as image features, facilitating smoother integration of multimodal information. The proposed method has been experimentally validated in the soft robot testbed, achieving satisfying accuracy in 3D force estimation (with a mean relative error of 0.84% compared to the best-reported result of 2.2% in the related works).
Read more9/14/2024
0
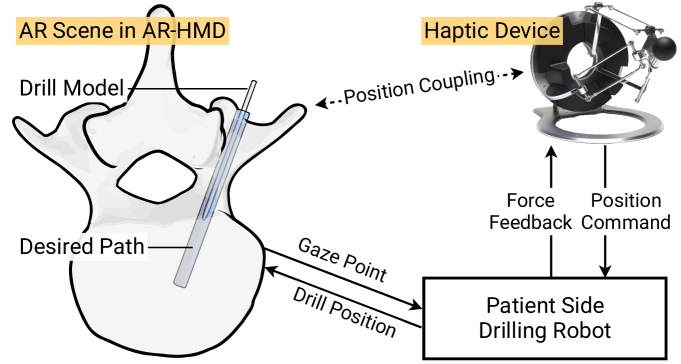
Visual Attention Based Cognitive Human-Robot Collaboration for Pedicle Screw Placement in Robot-Assisted Orthopedic Surgery
Chen Chen, Qikai Zou, Yuhang Song, Shiji Song, Xiang Li
Current orthopedic robotic systems largely focus on navigation, aiding surgeons in positioning a guiding tube but still requiring manual drilling and screw placement. The automation of this task not only demands high precision and safety due to the intricate physical interactions between the surgical tool and bone but also poses significant risks when executed without adequate human oversight. As it involves continuous physical interaction, the robot should collaborate with the surgeon, understand the human intent, and always include the surgeon in the loop. To achieve this, this paper proposes a new cognitive human-robot collaboration framework, including the intuitive AR-haptic human-robot interface, the visual-attention-based surgeon model, and the shared interaction control scheme for the robot. User studies on a robotic platform for orthopedic surgery are presented to illustrate the performance of the proposed method. The results demonstrate that the proposed human-robot collaboration framework outperforms full robot and full human control in terms of safety and ergonomics.
Read more5/16/2024