SENS3: Multisensory Database of Finger-Surface Interactions and Corresponding Sensations

0

Sign in to get full access
Overview
- This paper presents the SENS3 database, a multisensory dataset of finger-surface interactions and corresponding sensations.
- The database aims to provide a comprehensive resource for studying the relationship between tactile stimuli and perceptual experiences.
- It includes a wide range of surface textures, materials, and interaction dynamics, along with detailed measurements of the resulting sensations.
Plain English Explanation
The SENS3 database is a collection of information about how our fingers interact with different surfaces and the sensations we experience as a result. When we touch something, our fingers and skin gather a lot of information - things like the roughness, softness, temperature, and movement of the surface. The SENS3 database captures all of these details, along with the specific sensations people report feeling, like warmth, vibration, or stickiness.
This is valuable because it helps us better understand the link between the physical properties of a surface and our perceptual experiences of it. By having a large, diverse dataset of these finger-surface interactions and sensations, researchers can study patterns and develop models to predict how people will experience different materials and textures. This could be useful for designing more realistic haptic interfaces, optimizing textile sensors, or transfer learning for tactile perception.
Technical Explanation
The SENS3 database contains measurements from a variety of textures, materials, and finger interaction dynamics. For each surface, the researchers recorded detailed information about the physical properties, such as roughness, hardness, and temperature. They also had human participants interact with the surfaces and report on the specific sensations they experienced, like warmth, vibration, or stickiness.
This data was collected using a range of specialized equipment, including force/torque sensors, thermal cameras, and high-speed video. The researchers used a custom-built device that allowed them to precisely control and measure the finger-surface interactions. By combining this objective data with the subjective reports from participants, the SENS3 database provides a rich, multimodal representation of tactile experiences.
The dataset includes over 10,000 individual data points, covering a diverse set of 120 different surfaces. These surfaces were chosen to span a wide range of material properties, from soft fabrics to rigid plastics. The interactions also varied, including different types of motion (stroking, tapping, pressing) and contact conditions (static, dynamic).
Critical Analysis
The SENS3 database appears to be a comprehensive and well-designed resource for studying tactile perception. By including such a diverse set of surfaces and interactions, along with both objective and subjective data, it offers a valuable foundation for future research in this area.
However, one potential limitation is the reliance on self-reported sensations from participants. While this provides important subjective information, it also introduces the possibility of individual differences and biases in perception. The researchers acknowledge this and suggest that future work could explore more objective measures of tactile experience, such as neural responses.
Additionally, the dataset is primarily focused on the sense of touch, with limited information on other sensory modalities like vision or sound that may also influence tactile perception. Expanding the dataset to include multimodal interactions could lead to even richer insights.
Overall, the SENS3 database represents a significant contribution to the field of haptic research. By making this dataset publicly available, the researchers have provided a valuable resource for predictive tactile sensing and the development of more comprehensive multimodal perception systems.
Conclusion
The SENS3 database is a comprehensive, multisensory dataset that captures the complex relationship between finger-surface interactions and the resulting sensations. By providing a rich, diverse collection of data on tactile experiences, this resource has the potential to drive significant advances in our understanding of human touch and its applications in fields like robotics, virtual reality, and product design.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
SENS3: Multisensory Database of Finger-Surface Interactions and Corresponding Sensations
Jagan K. Balasubramanian, Bence L. Kodak, Yasemin Vardar
The growing demand for natural interactions with technology underscores the importance of achieving realistic touch sensations in digital environments. Realizing this goal highly depends on comprehensive databases of finger-surface interactions, which need further development. Here, we present SENS3 -- www.sens3.net -- an extensive open-access repository of multisensory data acquired from fifty surfaces when two participants explored them with their fingertips through static contact, pressing, tapping, and sliding. SENS3 encompasses high-fidelity visual, audio, and haptic information recorded during these interactions, including videos, sounds, contact forces, torques, positions, accelerations, skin temperature, heat flux, and surface photographs. Additionally, it incorporates thirteen participants' psychophysical sensation ratings (rough-smooth, flat-bumpy, sticky-slippery, hot-cold, regular-irregular, fine-coarse, hard-soft, and wet-dry) while exploring these surfaces freely. Designed with an open-ended framework, SENS3 has the potential to be expanded with additional textures and participants. We anticipate that SENS3 will be valuable for advancing multisensory texture rendering, user experience development, and touch sensing in robotics.
Read more7/2/2024

0
Cluster Haptic Texture Database: Haptic Texture Database with Variety in Velocity and Direction of Sliding Contacts
Michikuni Eguchi, Madoka Ito, Tomohiro Hayase, Yuichi Hiroi, Takefumi Hiraki
Human perception integrates multisensory information, with tactile perception playing a key role in object and surface recognition. While human-machine interfaces with haptic modalities offer enhanced system performance, existing datasets focus primarily on visual data, overlooking comprehensive haptic information. Previous haptic texture databases have recorded sound and acceleration signals, but often ignore the nuanced differences between probe-texture and finger-texture interactions. Recognizing this shortcoming, we present the Cluster Haptic Texture Database, a multimodal dataset that records visual, auditory, and haptic signals from an artificial urethane rubber fingertip interacting with different textured surfaces. This database, designed to mimic the properties of the human finger, includes five velocity levels and eight directional variations, providing a comprehensive study of tactile interactions. Our evaluations reveal the effectiveness of classifiers trained on this dataset in identifying surfaces, and the subtleties of estimating velocity and direction for each surface.
Read more7/24/2024

0
Snap-it, Tap-it, Splat-it: Tactile-Informed 3D Gaussian Splatting for Reconstructing Challenging Surfaces
Mauro Comi, Alessio Tonioni, Max Yang, Jonathan Tremblay, Valts Blukis, Yijiong Lin, Nathan F. Lepora, Laurence Aitchison
Touch and vision go hand in hand, mutually enhancing our ability to understand the world. From a research perspective, the problem of mixing touch and vision is underexplored and presents interesting challenges. To this end, we propose Tactile-Informed 3DGS, a novel approach that incorporates touch data (local depth maps) with multi-view vision data to achieve surface reconstruction and novel view synthesis. Our method optimises 3D Gaussian primitives to accurately model the object's geometry at points of contact. By creating a framework that decreases the transmittance at touch locations, we achieve a refined surface reconstruction, ensuring a uniformly smooth depth map. Touch is particularly useful when considering non-Lambertian objects (e.g. shiny or reflective surfaces) since contemporary methods tend to fail to reconstruct with fidelity specular highlights. By combining vision and tactile sensing, we achieve more accurate geometry reconstructions with fewer images than prior methods. We conduct evaluation on objects with glossy and reflective surfaces and demonstrate the effectiveness of our approach, offering significant improvements in reconstruction quality.
Read more4/1/2024
0
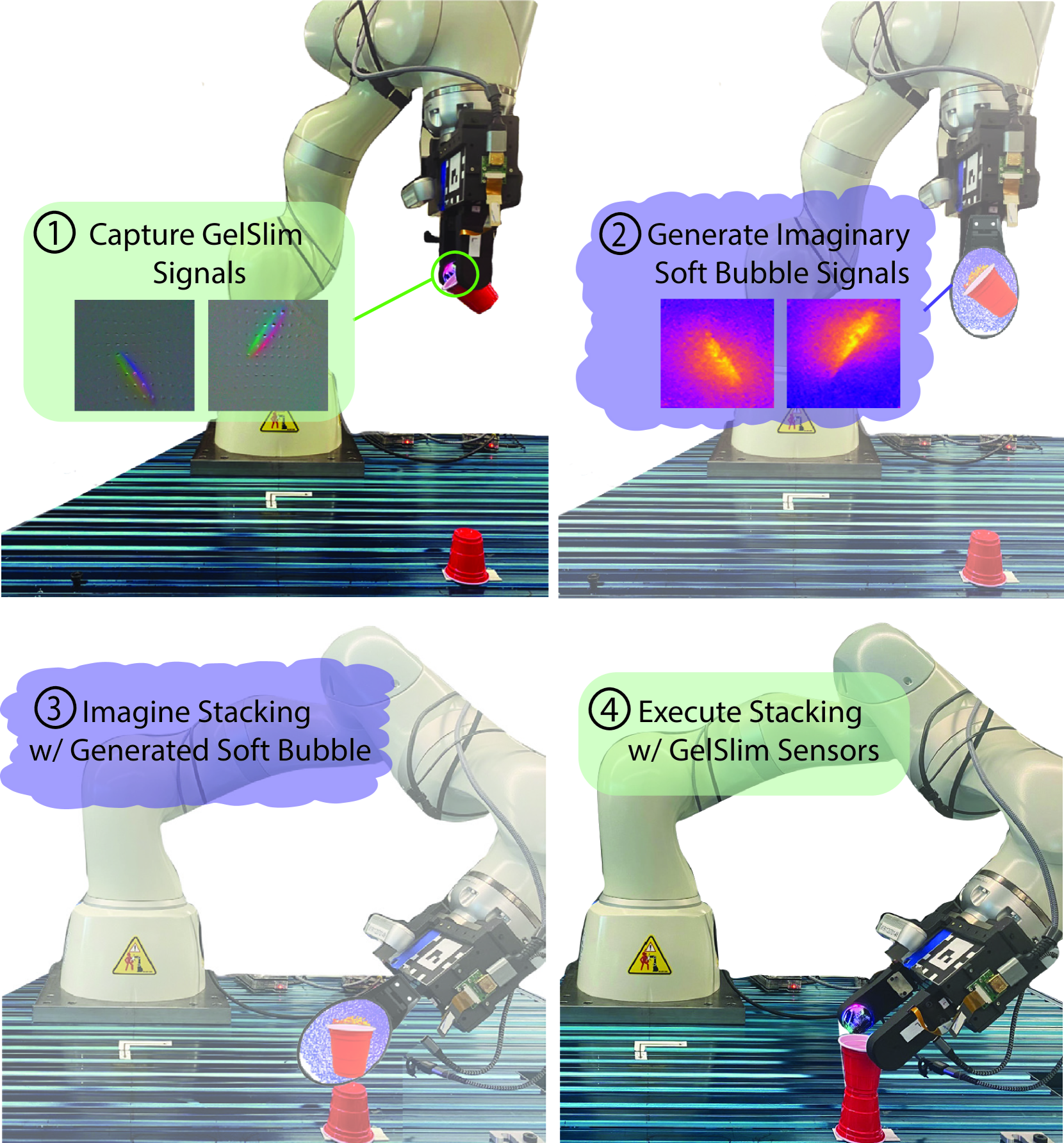
Touch2Touch: Cross-Modal Tactile Generation for Object Manipulation
Samanta Rodriguez, Yiming Dou, Miquel Oller, Andrew Owens, Nima Fazeli
Today's touch sensors come in many shapes and sizes. This has made it challenging to develop general-purpose touch processing methods since models are generally tied to one specific sensor design. We address this problem by performing cross-modal prediction between touch sensors: given the tactile signal from one sensor, we use a generative model to estimate how the same physical contact would be perceived by another sensor. This allows us to apply sensor-specific methods to the generated signal. We implement this idea by training a diffusion model to translate between the popular GelSlim and Soft Bubble sensors. As a downstream task, we perform in-hand object pose estimation using GelSlim sensors while using an algorithm that operates only on Soft Bubble signals. The dataset, the code, and additional details can be found at https://www.mmintlab.com/research/touch2touch/.
Read more9/14/2024