Sim-to-Real Domain Adaptation for Deformation Classification

0

Sign in to get full access
Overview
- This paper explores the challenge of adapting machine learning models trained in simulated environments to perform well in real-world scenarios for deformation classification tasks.
- The researchers propose a novel Sim-to-Real Domain Adaptation for Deformation Classification approach that leverages both simulated and real-world data to improve model performance in the target domain.
- The method builds on prior work in unsupervised domain adaptation and sim-to-real transfer learning for industrial applications.
Plain English Explanation
Imagine you want to build a machine learning model that can identify different types of deformations in objects, like bends or cracks. It's difficult to get enough real-world data to train such a model well, so you decide to generate simulated data instead. However, there can be a big gap between the simulated data and what you'd see in the real world.
The researchers in this paper tackle this challenge by developing a new approach that combines the simulated data with a smaller amount of real-world data. This allows the model to learn the underlying patterns of deformation while also adapting to the nuances of the real-world environment. The key insight is that by leveraging both simulated and real data, the model can perform better on real-world deformation classification tasks compared to using just one or the other.
This work builds on previous research in transferring knowledge from simulated to real-world environments and adapting models to work in different domains without requiring a lot of labeled data. The researchers show that their approach can effectively bridge the gap between simulated and real-world data for deformation classification, which has important applications in defect detection and visual inspection of industrial parts and products.
Technical Explanation
The key technical contributions of this paper are:
-
Sim-to-Real Domain Adaptation Framework: The researchers propose a new framework for adapting machine learning models trained on simulated data to perform well on real-world deformation classification tasks. This involves learning a shared feature representation between the simulated and real-world data domains.
-
Adversarial Domain Adaptation: The model uses an adversarial training approach to learn domain-invariant features that capture the underlying patterns of deformation regardless of whether the input is from the simulated or real-world domain.
-
Perceptual Similarity Loss: In addition to the adversarial loss, the researchers introduce a perceptual similarity loss that encourages the model to learn features that capture the visual similarity between deformations in the simulated and real-world data.
-
Evaluation on Industrial Datasets: The proposed approach is evaluated on two industrial datasets for deformation classification, demonstrating significant performance improvements over baseline methods that use only simulated or real-world data.
The results show that the combination of adversarial domain adaptation and perceptual similarity loss allows the model to effectively bridge the gap between simulated and real-world data, leading to better generalization to real-world deformation patterns.
Critical Analysis
One potential limitation of the paper is that it focuses solely on the deformation classification task and does not explore the broader applicability of the proposed sim-to-real domain adaptation approach. It would be valuable to see how well the method generalizes to other industrial inspection or visual understanding tasks that also suffer from the sim-to-real gap.
Additionally, the paper does not provide a detailed analysis of the types of deformations or real-world artifacts that the model struggles with, which could inform future research directions. It would be helpful to understand the specific challenges and limitations of the approach in order to further improve its performance and robustness.
Despite these minor caveats, the paper makes a significant contribution to the field of sim-to-real domain adaptation, providing a practical and effective solution for bridging the gap between simulated and real-world data for deformation classification. The work has important implications for industrial defect detection, visual inspection, and other industrial applications where acquiring large-scale real-world training data can be challenging.
Conclusion
This paper presents a novel Sim-to-Real Domain Adaptation for Deformation Classification approach that leverages both simulated and real-world data to improve model performance on real-world deformation classification tasks. The key technical innovations, including adversarial domain adaptation and perceptual similarity loss, allow the model to learn domain-invariant features that capture the underlying patterns of deformation regardless of the data source.
The results demonstrate the effectiveness of the proposed method on industrial datasets, highlighting its potential for applications in areas such as defect detection and visual inspection of industrial parts and products. This work contributes to the broader field of sim-to-real transfer learning and unsupervised domain adaptation, providing a practical solution for bridging the gap between simulated and real-world data in industrial applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Sim-to-Real Domain Adaptation for Deformation Classification
Joel Sol, Jamil Fayyad, Shadi Alijani, Homayoun Najjaran
Deformation detection is vital for enabling accurate assessment and prediction of structural changes in materials, ensuring timely and effective interventions to maintain safety and integrity. Automating deformation detection through computer vision is crucial for efficient monitoring, but it faces significant challenges in creating a comprehensive dataset of both deformed and non-deformed objects, which can be difficult to obtain in many scenarios. In this paper, we introduce a novel framework for generating controlled synthetic data that simulates deformed objects. This approach allows for the realistic modeling of object deformations under various conditions. Our framework integrates an intelligent adapter network that facilitates sim-to-real domain adaptation, enhancing classification results without requiring real data from deformed objects. We conduct experiments on domain adaptation and classification tasks and demonstrate that our framework improves sim-to-real classification results compared to simulation baseline.
Read more7/16/2024
🔎
0
Visual Deformation Detection Using Soft Material Simulation for Pre-training of Condition Assessment Models
Joel Sol, Amir M. Soufi Enayati, Homayoun Najjaran
This paper addresses the challenge of geometric quality assurance in manufacturing, particularly when human assessment is required. It proposes using Blender, an open-source simulation tool, to create synthetic datasets for machine learning (ML) models. The process involves translating expert information into shape key parameters to simulate deformations, generating images for both deformed and non-deformed objects. The study explores the impact of discrepancies between real and simulated environments on ML model performance and investigates the effect of different simulation backgrounds on model sensitivity. Additionally, the study aims to enhance the model's robustness to camera positioning by generating datasets with a variety of randomized viewpoints. The entire process, from data synthesis to model training and testing, is implemented using a Python API interfacing with Blender. An experiment with a soda can object validates the accuracy of the proposed pipeline.
Read more5/27/2024
0
Towards Reducing Data Acquisition and Labeling for Defect Detection using Simulated Data
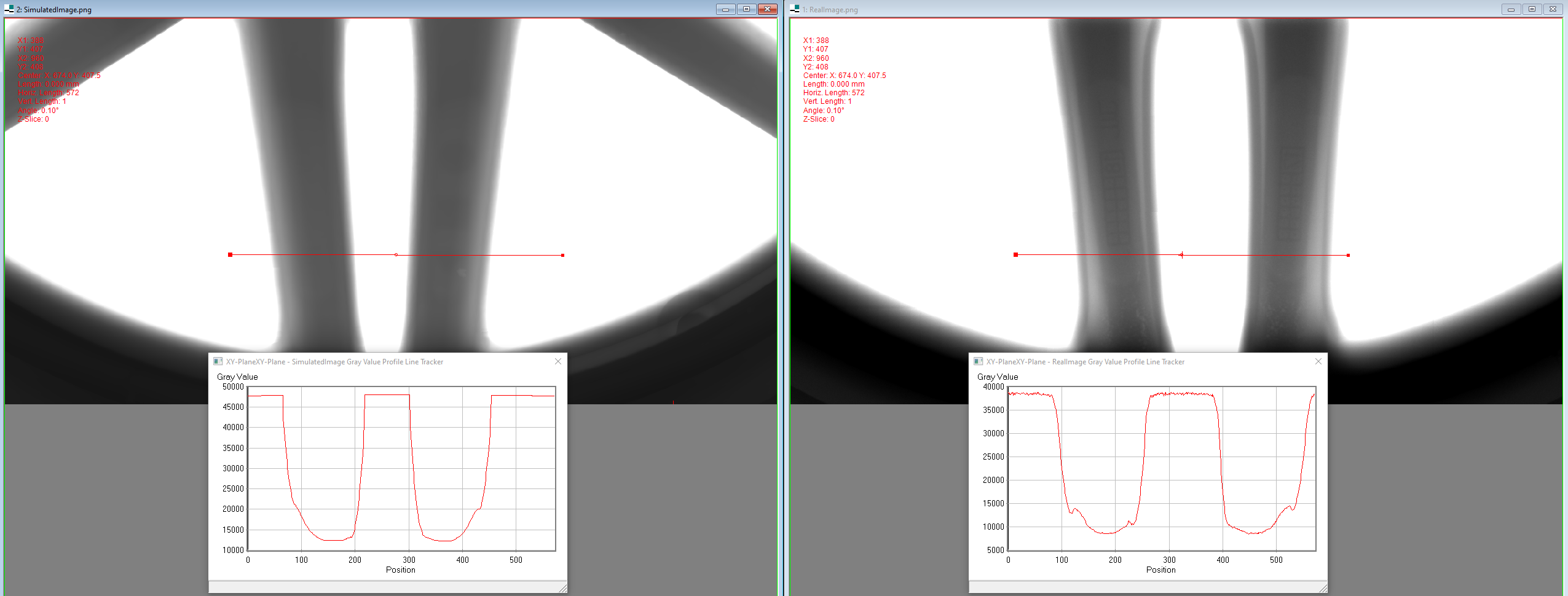
Lukas Malte Kemeter, Rasmus Hvingelby, Paulina Sierak, Tobias Schon, Bishwajit Gosswam
In many manufacturing settings, annotating data for machine learning and computer vision is costly, but synthetic data can be generated at significantly lower cost. Substituting the real-world data with synthetic data is therefore appealing for many machine learning applications that require large amounts of training data. However, relying solely on synthetic data is frequently inadequate for effectively training models that perform well on real-world data, primarily due to domain shifts between the synthetic and real-world data. We discuss approaches for dealing with such a domain shift when detecting defects in X-ray scans of aluminium wheels. Using both simulated and real-world X-ray images, we train an object detection model with different strategies to identify the training approach that generates the best detection results while minimising the demand for annotated real-world training samples. Our preliminary findings suggest that the sim-2-real domain adaptation approach is more cost-efficient than a fully supervised oracle - if the total number of available annotated samples is fixed. Given a certain number of labeled real-world samples, training on a mix of synthetic and unlabeled real-world data achieved comparable or even better detection results at significantly lower cost. We argue that future research into the cost-efficiency of different training strategies is important for a better understanding of how to allocate budget in applied machine learning projects.
Read more6/28/2024
0
CTS: Sim-to-Real Unsupervised Domain Adaptation on 3D Detection
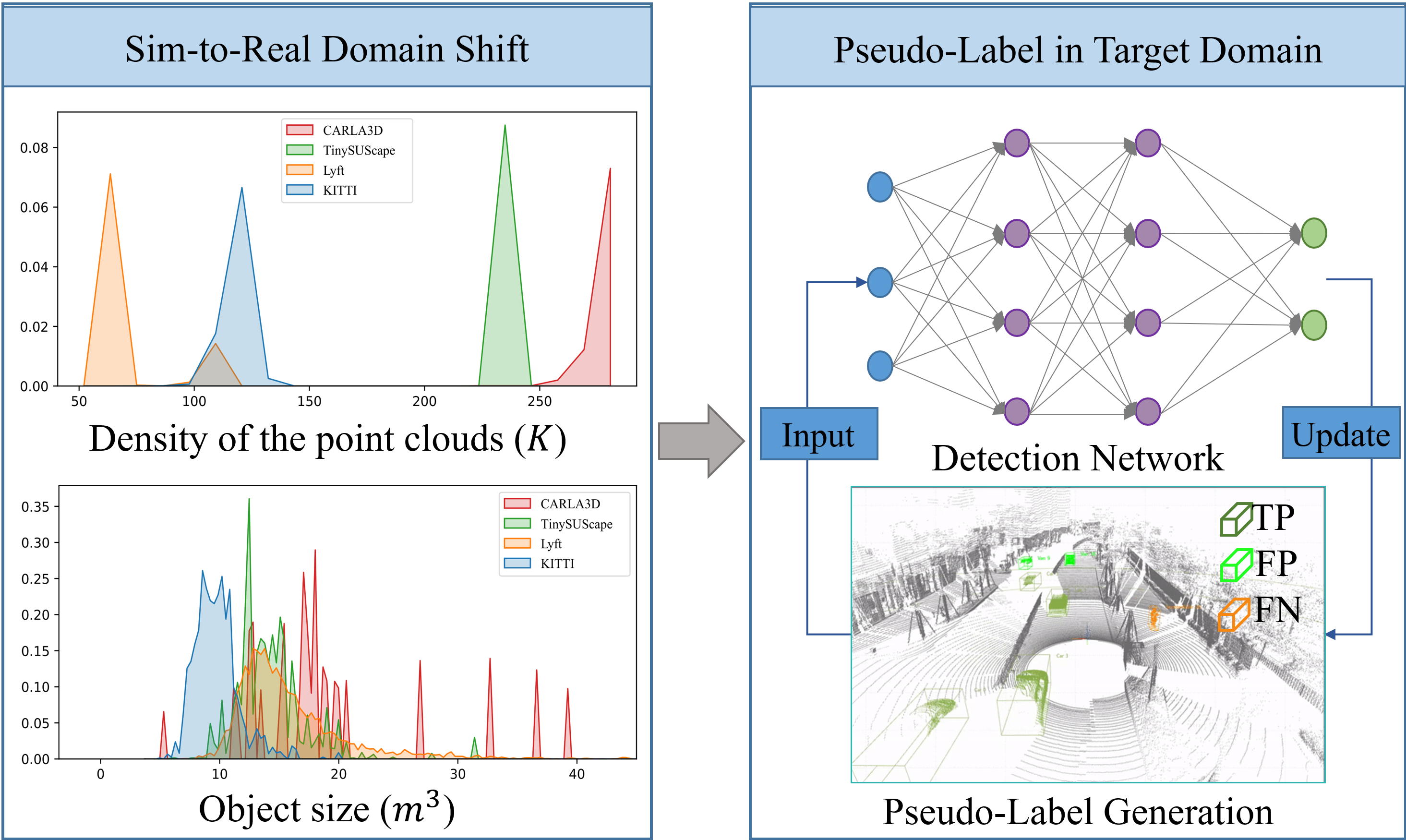
Meiying Zhang, Weiyuan Peng, Guangyao Ding, Chenyang Lei, Chunlin Ji, Qi Hao
Simulation data can be accurately labeled and have been expected to improve the performance of data-driven algorithms, including object detection. However, due to the various domain inconsistencies from simulation to reality (sim-to-real), cross-domain object detection algorithms usually suffer from dramatic performance drops. While numerous unsupervised domain adaptation (UDA) methods have been developed to address cross-domain tasks between real-world datasets, progress in sim-to-real remains limited. This paper presents a novel Complex-to-Simple (CTS) framework to transfer models from labeled simulation (source) to unlabeled reality (target) domains. Based on a two-stage detector, the novelty of this work is threefold: 1) developing fixed-size anchor heads and RoI augmentation to address size bias and feature diversity between two domains, thereby improving the quality of pseudo-label; 2) developing a novel corner-format representation of aleatoric uncertainty (AU) for the bounding box, to uniformly quantify pseudo-label quality; 3) developing a noise-aware mean teacher domain adaptation method based on AU, as well as object-level and frame-level sampling strategies, to migrate the impact of noisy labels. Experimental results demonstrate that our proposed approach significantly enhances the sim-to-real domain adaptation capability of 3D object detection models, outperforming state-of-the-art cross-domain algorithms, which are usually developed for real-to-real UDA tasks.
Read more6/27/2024