Skater: A Novel Bi-modal Bi-copter Robot for Adaptive Locomotion in Air and Diverse Terrain

0
Sign in to get full access
Overview
- This paper presents "Skater," a novel bi-modal bi-copter robot designed for adaptive locomotion in both air and diverse terrain.
- The robot combines the capabilities of a quadcopter and a wheeled robot, allowing it to navigate a wide range of environments.
- Key features include the ability to transition between aerial and ground-based locomotion, enhanced stability, and improved energy efficiency.
Plain English Explanation
The researchers have developed a unique robot called "Skater" that can move around in different ways. Skater is a combination of a quadcopter (a drone with four propellers) and a wheeled robot. This allows it to fly through the air like a drone, but also roll along the ground like a wheeled robot.
The main advantage of this design is that Skater can adapt to different surroundings. It can fly over obstacles or difficult terrain, then transition to rolling on the ground when needed. This gives it the ability to navigate a wide variety of environments, from open spaces to confined areas with obstacles.
Embodied Design for Enhanced Flipper-Based Locomotion in Complex Environments and RollBot: A Spherical Robot Driven by a Single Actuator are examples of other robots that can adapt their locomotion to different terrains.
The researchers designed Skater to be stable and energy-efficient, with the ability to transition smoothly between aerial and ground-based movement. This makes it well-suited for tasks like search and rescue, inspection, or exploration in complex, unstructured environments.
Technical Explanation
The key innovation of the "Skater" robot is its bi-modal locomotion system, which combines the capabilities of a quadcopter and a wheeled robot. The robot consists of a central body with four propellers for aerial locomotion, and a wheeled base for ground-based movement.
Modular Multi-Rotors: From Quadrotors to Fully Reconfigurable Robots discusses similar approaches to combining aerial and ground-based locomotion in a single robot.
To enable the transition between aerial and ground-based modes, Skater uses a novel mechanical design with a tilting mechanism. This allows the propellers to be reoriented to provide thrust for both flight and wheeled locomotion. The researchers also developed control algorithms to smoothly transition between these two modes of operation.
Additionally, Skater incorporates design features to enhance its stability and energy efficiency. For example, the placement of the center of mass and the use of lightweight materials help to improve the robot's balance and reduce energy consumption.
Agile and Versatile Bipedal Robot: Tracking Control Through Learned Dynamics and Learning Robust Autonomous Navigation and Locomotion for Wheeled-Legged Robots discuss similar techniques for improving the stability and energy efficiency of mobile robots.
Critical Analysis
The researchers have presented a promising proof-of-concept for the Skater robot, demonstrating its ability to transition between aerial and ground-based locomotion. However, the paper does not provide extensive experimental results or analysis of the robot's performance in real-world scenarios.
While the mechanical design and control algorithms seem well-thought-out, further testing and evaluation would be needed to fully assess the robot's capabilities and limitations. For example, the paper does not address how Skater might handle more challenging terrain, such as steep inclines or uneven surfaces.
Additionally, the energy efficiency claims made in the paper could benefit from a more detailed analysis, including comparisons to other multi-modal robot designs and conventional quadcopters or wheeled robots.
Conclusion
The Skater robot represents an interesting advancement in the field of multi-modal robot locomotion. By combining the strengths of quadcopters and wheeled robots, the researchers have created a versatile platform that can navigate a wide range of environments. The key innovation lies in the seamless transition between aerial and ground-based modes, which could enable new applications in areas such as search and rescue, inspection, and exploration.
While further research and development are needed to fully realize the potential of the Skater design, this work demonstrates the value of exploring novel robot morphologies and control strategies to enhance mobility and adaptability in complex, unstructured environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Skater: A Novel Bi-modal Bi-copter Robot for Adaptive Locomotion in Air and Diverse Terrain
Junxiao Lin, Ruibin Zhang, Neng Pan, Chao Xu, Fei Gao
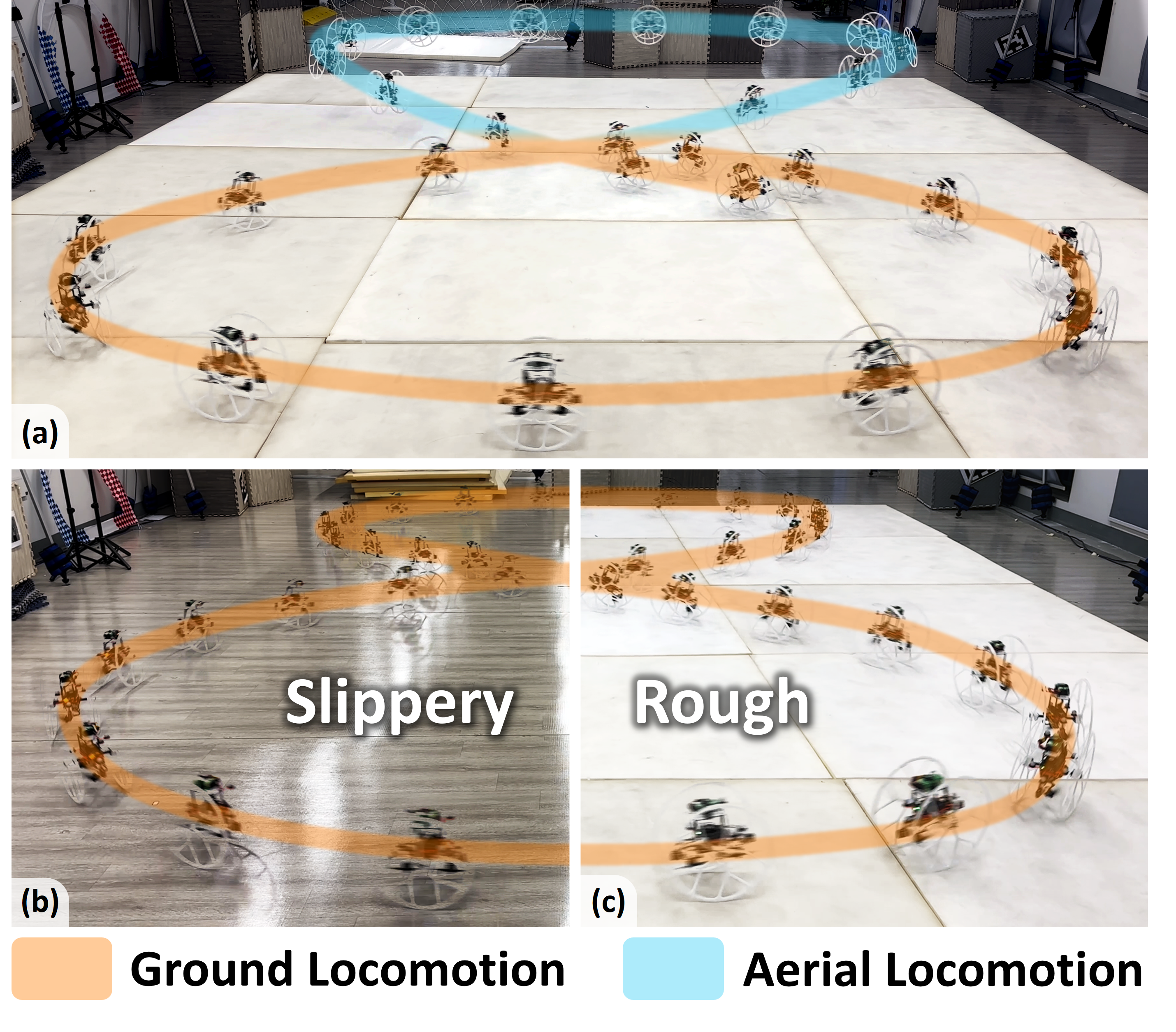
In this letter, we present a novel bi-modal bi-copter robot called Skater, which is adaptable to air and various ground surfaces. Skater consists of a bi-copter moving along its longitudinal direction with two passive wheels on both sides. Using a longitudinally arranged bi-copter as the unified actuation system for both aerial and ground modes, this robot not only keeps a concise and lightweight mechanism but also possesses exceptional terrain traversing capability and strong steering capacity. Moreover, leveraging the vectored thrust characteristic of bi-copters, the Skater can actively generate the centripetal force needed for steering, enabling it to achieve stable movement even on slippery surfaces. Furthermore, we model the comprehensive dynamics of the Skater, analyze its differential flatness, and introduce a controller using nonlinear model predictive control for trajectory tracking. The outstanding performance of the system is verified by extensive real-world experiments and benchmark comparisons.
Read more5/28/2024

0
An Efficient Trajectory Generation for Bi-copter Flight in Tight Space
Xin Dong, Yangjie Cui, Jingwu Xiang, Daochun Li, Zhan Tu
Unlike squared (or alike) quadrotors, elongated bi-copters leverage natural superiority in crossing tight spaces. To date, extensive works have focused on the design, modeling, and control of bi-copters. Besides, a proper motion planner utilizing bi-copters' shape characteristics is essential to efficiently and safely traverse tight spaces, yet it has rarely been studied. Current motion planning methods will significantly compromise their ability to traverse narrow spaces if the map is inflated based on the long dimension of the bi-copter. In this paper, we propose an efficient motion planning method that enables the safe navigation of bi-copters through narrow spaces. We first adapt a dynamic, feasible path-finding algorithm with whole-body collision checks to generate a collision-free path. Subsequently, we jointly optimize the position and rotation of the bi-copter to produce a trajectory that is safe, dynamically feasible, and smooth. Extensive simulations and real-world experiments have been conducted to verify the reliability and robustness of the proposed method.
Read more6/4/2024

0
MorphoMove: Bi-Modal Path Planner with MPC-based Path Follower for Multi-Limb Morphogenetic UAV
Muhammad Ahsan Mustafa, Yasheerah Yaqoot, Mikhail Martynov, Sausar Karaf, Dzmitry Tsetserukou
This paper discusses developments for a multi-limb morphogenetic UAV, MorphoGear, that is capable of both aerial flight and ground locomotion. A hybrid path planning algorithm based on the A* strategy has been developed, enabling seamless transition between air-to-ground navigation modes, thereby enhancing robot's mobility in complex environments. Moreover, precise path following is achieved during ground locomotion with a Model Predictive Control (MPC) architecture for its novel walking behaviour. Experimental validation was conducted in the Unity simulation environment utilizing Python scripts to compute control values. The algorithm's performance is validated by the Root Mean Squared Error (RMSE) of 0.91 cm and a maximum error of 1.85 cm, as demonstrated by the results. These developments highlight the adaptability of MorphoGear in navigation through cluttered environments, establishing it as a usable tool in autonomous exploration, both aerial and ground-based.
Read more8/22/2024
🗣️
0
Embodied Design for Enhanced Flipper-Based Locomotion in Complex Terrains
Nnamdi Chikere, John McElroy, Yasemin Ozkan-Aydin
Robots are becoming increasingly essential for traversing complex environments such as disaster areas, extraterrestrial terrains, and marine environments. Yet, their potential is often limited by mobility and adaptability constraints. In nature, various animals have evolved finely tuned designs and anatomical features that enable efficient locomotion in diverse environments. Sea turtles, for instance, possess specialized flippers that facilitate both long-distance underwater travel and adept maneuvers across a range of coastal terrains. Building on the principles of embodied intelligence and drawing inspiration from sea turtle hatchings, this paper examines the critical interplay between a robot's physical form and its environmental interactions, focusing on how morphological traits and locomotive behaviors affect terrestrial navigation. We present a bio-inspired robotic system and study the impacts of flipper/body morphology and gait patterns on its terrestrial mobility across diverse terrains ranging from sand to rocks. Evaluating key performance metrics such as speed and cost of transport, our experimental results highlight adaptive designs as crucial for multi-terrain robotic mobility to achieve not only speed and efficiency but also the versatility needed to tackle the varied and complex terrains encountered in real-world applications.
Read more5/24/2024