Space Adaptive Search for Nonholonomic Mobile Robots Path Planning

0

Sign in to get full access
Overview
- Explores a space-adaptive search algorithm for path planning of nonholonomic mobile robots
- Focuses on developing an efficient and effective method for mobile robots to navigate complex environments
- Proposes a novel approach that adapts the search space based on the robot's current state and environmental constraints
Plain English Explanation
The paper presents a new technique for path planning of nonholonomic mobile robots, which are robots that have movement constraints, such as not being able to move sideways. The key idea is to adjust the search space based on the robot's current position and the obstacles in the environment.
This "space-adaptive search" approach aims to find an optimal path more efficiently compared to traditional methods. Instead of searching the entire environment, the algorithm focuses on the relevant areas, reducing computation time and improving the overall performance.
The method leverages motion primitives, which are pre-computed motion patterns, to generate candidate paths. By adaptively modifying the search space, the approach can better handle the constraints of nonholonomic robots and navigate through cluttered environments.
Technical Explanation
The paper proposes a space-adaptive search algorithm for path planning of nonholonomic mobile robots. The key elements of the approach are:
-
Motion Primitives: The method uses a set of pre-computed motion primitives to generate candidate paths. These motion primitives represent feasible motion patterns for the nonholonomic robot.
-
Adaptive Search Space: The algorithm dynamically adjusts the search space based on the robot's current state and environmental constraints. This helps to focus the search on the most relevant areas, improving efficiency.
-
Cost Function: The approach defines a cost function that considers factors such as path length, clearance from obstacles, and the robot's kinematic constraints to evaluate the quality of candidate paths.
-
Optimization: The algorithm employs an optimization process to find the optimal path that minimizes the cost function while satisfying the robot's kinematic constraints.
The paper presents experiments evaluating the performance of the proposed space-adaptive search algorithm against traditional path planning methods. The results demonstrate the effectiveness of the approach in terms of computational efficiency and the ability to navigate through cluttered environments.
Critical Analysis
The paper presents a promising approach for path planning of nonholonomic mobile robots. The adaptive search space concept seems well-suited for handling the constraints of such robots and navigating complex environments.
One potential limitation discussed in the paper is the reliance on pre-computed motion primitives, which may not always capture the full range of possible robot motions. Additionally, the cost function design, while comprehensive, could benefit from further exploration and validation.
Another area for further research could be the extension of the approach to handle dynamic environments, where obstacles may move or change over time. Incorporating real-time sensor data and adaptation mechanisms could enhance the algorithm's performance in such scenarios.
Overall, the space-adaptive search algorithm presented in the paper is a promising contribution to the field of nonholonomic mobile robot path planning. The insights and techniques could inspire further advancements in this important area of robotics research.
Conclusion
The paper introduces a space-adaptive search algorithm for path planning of nonholonomic mobile robots. The key innovation is the dynamic adjustment of the search space based on the robot's state and environmental constraints, which helps to improve the efficiency and effectiveness of the path planning process.
The proposed method leverages motion primitives and a comprehensive cost function to generate and evaluate candidate paths, ultimately finding an optimal solution that satisfies the robot's kinematic constraints. The experimental results demonstrate the advantages of this approach over traditional path planning techniques.
While the paper presents a promising contribution, there are opportunities for further research, such as exploring alternative cost function designs and extending the algorithm to handle dynamic environments. Overall, the space-adaptive search approach offers valuable insights and techniques that could advance the field of nonholonomic mobile robot navigation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Space Adaptive Search for Nonholonomic Mobile Robots Path Planning
Qi Wang
Path planning for a nonholonomic mobile robot is a challenging problem. This paper proposes a novel space adaptive search (SAS) approach that greatly reduces the computation cost of nonholonomic mobile robot path planning. The classic search-based path planning only updates the state on the current location in each step, which is very inefficient, and, therefore, can easily be trapped by local minimum. The SAS updates not only the state of the current location, but also all states in the neighborhood, and the size of the neighborhood is adaptively varied based on the clearance around the current location at each step. Since a great deal of states can be immediately updated, the search can explore the local minimum and get rid of it very fast. As a result, the proposed approach can effectively deal with clustered environments with a large number of local minima. The SAS also utilizes a set of predefined motion primitives, and dynamically scales them into different sizes during the search to create various new primitives with differing sizes and curvatures. This greatly promotes the flexibility of the search of path planning in more complex environments. Unlike the A* family, which uses heuristic to accelerate the search, the experiments shows that the SAS requires much less computation time and memory cost even without heuristic than the weighted A* algorithm, while still preserving the optimality of the produced path. However, the SAS can also be applied together with heuristic or other path planning algorithms.
Read more7/9/2024

0
Hierarchical Large Scale Multirobot Path (Re)Planning
Lishuo Pan, Kevin Hsu, Nora Ayanian
We consider a large-scale multi-robot path planning problem in a cluttered environment. Our approach achieves real-time replanning by dividing the workspace into cells and utilizing a hierarchical planner. Specifically, multi-commodity flow-based high-level planners route robots through the cells to reduce congestion, while an anytime low-level planner computes collision-free paths for robots within each cell in parallel. Despite resulting in longer paths compared to the baseline multi-agent pathfinding algorithm, our method produces a solution with significant improvement in computation time. Specifically, we show empirical results of a 500-times speedup in computation time compared to the baseline multi-agent pathfinding approach on the environments we study. We account for the robot's embodiment and support non-stop execution when replanning continuously. We demonstrate the real-time performance of our algorithm with up to 142 robots in simulation, and a representative 32 physical Crazyflie nano-quadrotor experiment.
Read more7/4/2024

0
Real-time Motion Planning for autonomous vehicles in dynamic environments
Mohammad Dehghani Tezerjani, Dominic Carrillo, Deyuan Qu, Sudip Dhakal, Amir Mirzaeinia, Qing Yang
Recent advancements in self-driving car technologies have enabled them to navigate autonomously through various environments. However, one of the critical challenges in autonomous vehicle operation is trajectory planning, especially in dynamic environments with moving obstacles. This research aims to tackle this challenge by proposing a robust algorithm tailored for autonomous cars operating in dynamic environments with moving obstacles. The algorithm introduces two main innovations. Firstly, it defines path density by adjusting the number of waypoints along the trajectory, optimizing their distribution for accuracy in curved areas and reducing computational complexity in straight sections. Secondly, it integrates hierarchical motion planning algorithms, combining global planning with an enhanced $A^*$ graph-based method and local planning using the time elastic band algorithm with moving obstacle detection considering different motion models. The proposed algorithm is adaptable for different vehicle types and mobile robots, making it versatile for real-world applications. Simulation results demonstrate its effectiveness across various conditions, promising safer and more efficient navigation for autonomous vehicles in dynamic environments. These modifications significantly improve trajectory planning capabilities, addressing a crucial aspect of autonomous vehicle technology.
Read more6/6/2024
0
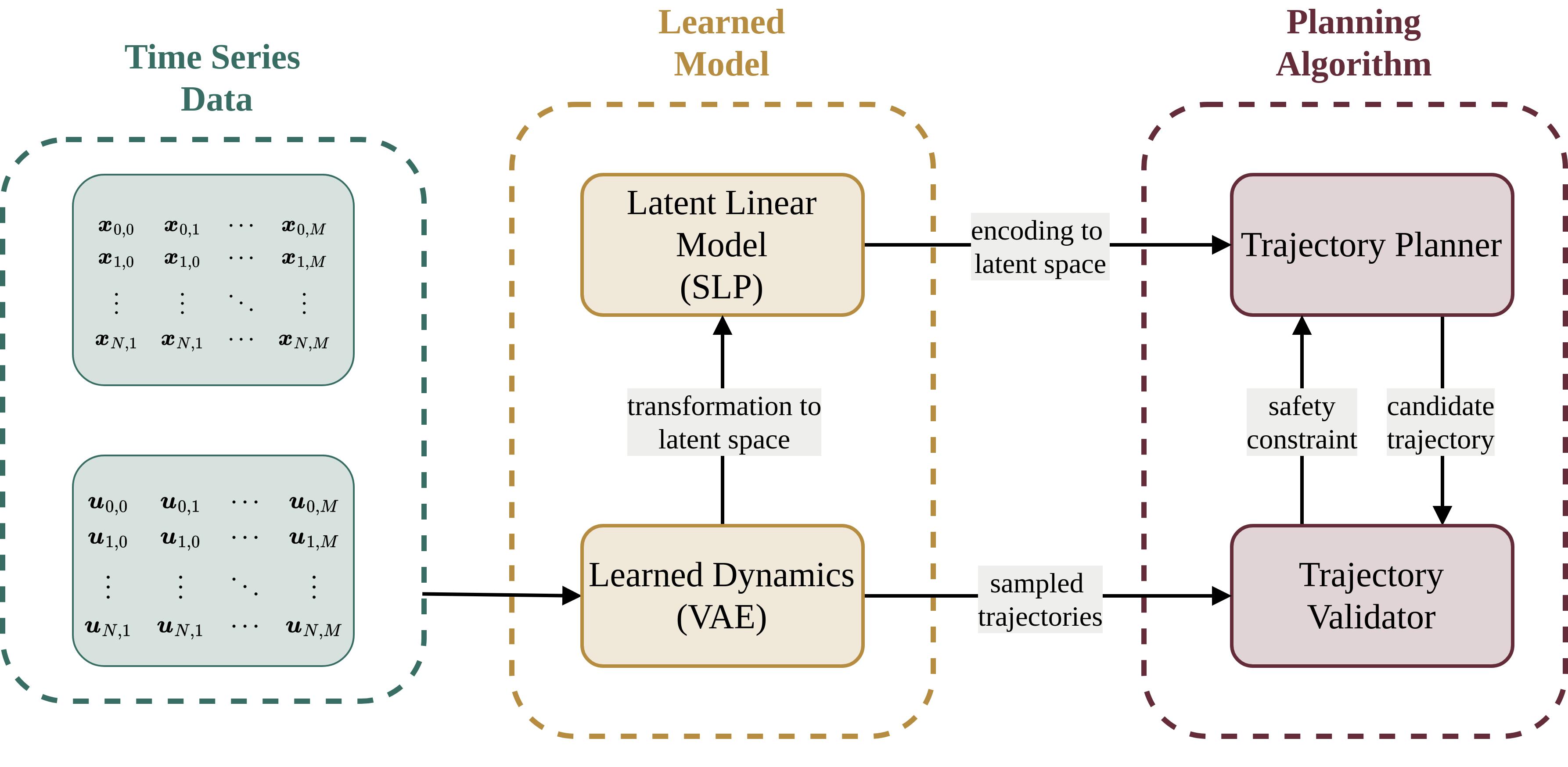
LaPlaSS: Latent Space Planning for Stochastic Systems
Marlyse Reeves, Brian C. Williams
Autonomous mobile agents often operate in hazardous environments, necessitating an awareness of safety. These agents can have non-linear, stochastic dynamics that must be considered during planning to guarantee bounded risk. Most state of the art methods require closed-form dynamics to verify plan correctness and safety however modern robotic systems often have dynamics that are learned from data. Thus, there is a need to perform efficient trajectory planning with guarantees on risk for agents without known dynamics models. We propose a generate-and-test approach to risk-bounded planning in which a planner generates a candidate trajectory using an approximate linear dynamics model and a validator assesses the risk of the trajectory, computing additional safety constraints for the planner if the candidate does not satisfy the desired risk bound. To acquire the approximate model, we use a variational autoencoder to learn a latent linear dynamics model and encode the planning problem into the latent space to generate the candidate trajectory. The VAE also serves to sample trajectories around the candidate to use in the validator. We demonstrate that our algorithm, LaPlaSS, is able to generate trajectory plans with bounded risk for a real-world agent with learned dynamics and is an order of magnitude more efficient than the state of the art.
Read more4/11/2024