StraightPCF: Straight Point Cloud Filtering

0
🌐
Sign in to get full access
Overview
- This paper introduces a new deep learning-based method called StraightPCF for point cloud filtering, which aims to remove noise from 3D point cloud data while preserving the underlying clean surfaces.
- The key innovation is that StraightPCF moves noisy points along straight paths, rather than stochastic trajectories, to converge on the clean surfaces more efficiently.
- The method models noisy point cloud patches as intermediate states between high-noise variants and their clean counterparts, and uses a VelocityModule to infer a constant flow velocity to guide the straight filtering trajectories.
- An additional DistanceModule scales the straight trajectories based on estimated distance to the clean surface, enabling convergence near the clean points.
- StraightPCF is a lightweight network with only around 530K parameters, significantly smaller than recent state-of-the-art point cloud filtering methods.
Plain English Explanation
Point clouds are 3D data representations made up of a collection of points in space. They are commonly used in various 3D vision and robotics applications, such as 3D reconstruction and robotic navigation. However, point cloud data can often be noisy, containing extraneous or inaccurate points that don't accurately reflect the underlying 3D structure.
Point cloud filtering is the process of removing this noise while preserving the clean, underlying surfaces. Imagine you have a 3D model of an object, but it's blurry and has some random extra points scattered around. Point cloud filtering would try to clean up the model, smoothing out the surfaces and getting rid of the random extra points, to reveal the true shape of the object.
The StraightPCF method proposed in this paper tackles this point cloud filtering task using a new deep learning approach. Rather than moving the noisy points around randomly to find the clean surfaces, StraightPCF moves them along straight, direct paths. This helps reduce errors and allows the points to converge on the clean surfaces more efficiently.
The key insight is that noisy point cloud patches can be seen as intermediate states between very noisy versions and their clean counterparts. StraightPCF uses a neural network component called the VelocityModule to learn the constant flow velocity needed to transition from the noisy states to the clean states along these straight paths. An additional DistanceModule helps scale the straight trajectories based on how far the noisy points are from the clean surfaces.
Compared to other state-of-the-art point cloud filtering methods, StraightPCF is a relatively lightweight network with just 530,000 parameters. This makes it more efficient and easier to deploy in real-world applications. Experiments show that StraightPCF achieves impressive results in removing noise from both synthetic and real-world point cloud data, all without needing complex regularization techniques.
Technical Explanation
Point cloud filtering is a fundamental task in 3D computer vision that aims to remove noise from 3D point cloud data while preserving the underlying clean surfaces. State-of-the-art methods typically achieve this by moving noisy points along stochastic trajectories towards the clean surfaces. However, these methods often require additional regularization techniques, both within the training objective and during post-processing, to ensure the fidelity of the filtered results.
To address these limitations, the authors of this paper introduce a new deep learning-based approach called StraightPCF. The key innovation is that StraightPCF moves the noisy points along straight, direct paths rather than stochastic trajectories. This helps reduce discretization errors and leads to faster convergence towards the clean surfaces.
The core of StraightPCF is a neural network architecture that models noisy point cloud patches as intermediate states between high-noise variants and their clean counterparts. The network includes a VelocityModule that learns to infer a constant flow velocity to guide the points along these straight filtering trajectories from the noisy states to the clean states.
Additionally, the network has a DistanceModule that estimates the distance between the noisy points and the clean surfaces. This distance information is used to scale the straight trajectories, ensuring the points converge near the clean surfaces.
Compared to recent state-of-the-art point cloud filtering networks like IterativePFN, StraightPCF is a much more lightweight model, with only around 530,000 parameters - about 17% the size of IterativePFN. Despite its smaller size, extensive experiments on both synthetic and real-world data demonstrate that StraightPCF achieves state-of-the-art performance in point cloud filtering, without the need for complex regularization techniques.
Critical Analysis
The StraightPCF approach presents a novel and efficient solution to the point cloud filtering problem. The key innovation of using straight filtering trajectories, guided by the learned VelocityModule and DistanceModule, is an elegant and effective way to address the limitations of existing stochastic trajectory-based methods.
One potential limitation of the approach, as mentioned in the paper, is that StraightPCF may struggle with more complex, non-planar surfaces. The assumption of straight filtering paths may not hold as well in these scenarios, potentially leading to suboptimal performance. It would be interesting to see how StraightPCF compares to other methods, such as PointDiffFormer or 3DMAMBAIPF, on more complex real-world datasets.
Additionally, the paper does not provide much insight into the network's behavior or the factors that contribute to its strong performance. Further analysis, such as visualizations of the intermediate filtering steps or ablation studies, could help shed light on the inner workings of StraightPCF and potentially suggest directions for future improvements.
Overall, the StraightPCF method represents a significant advancement in the field of point cloud filtering, demonstrating the potential of deep learning-based approaches to tackle this important 3D vision task in a more efficient and effective manner.
Conclusion
The StraightPCF method introduced in this paper offers a novel and efficient solution to the problem of point cloud filtering. By moving noisy points along straight, direct paths rather than stochastic trajectories, StraightPCF is able to reduce discretization errors and achieve faster convergence towards the clean underlying surfaces.
The key technical innovations of the StraightPCF approach include the VelocityModule, which learns a constant flow velocity to guide the straight filtering trajectories, and the DistanceModule, which scales these trajectories based on the estimated distance to the clean surfaces. Together, these components enable StraightPCF to achieve state-of-the-art performance in point cloud filtering, all while maintaining a lightweight network architecture.
The implications of this research extend beyond just point cloud filtering, as efficient and robust 3D data processing is critical for a wide range of applications, from 3D reconstruction to robotic navigation and point cloud denoising. The StraightPCF method represents a significant step forward in our ability to work with noisy 3D data, paving the way for more reliable and practical real-world 3D vision systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🌐
0
StraightPCF: Straight Point Cloud Filtering
Dasith de Silva Edirimuni, Xuequan Lu, Gang Li, Lei Wei, Antonio Robles-Kelly, Hongdong Li
Point cloud filtering is a fundamental 3D vision task, which aims to remove noise while recovering the underlying clean surfaces. State-of-the-art methods remove noise by moving noisy points along stochastic trajectories to the clean surfaces. These methods often require regularization within the training objective and/or during post-processing, to ensure fidelity. In this paper, we introduce StraightPCF, a new deep learning based method for point cloud filtering. It works by moving noisy points along straight paths, thus reducing discretization errors while ensuring faster convergence to the clean surfaces. We model noisy patches as intermediate states between high noise patch variants and their clean counterparts, and design the VelocityModule to infer a constant flow velocity from the former to the latter. This constant flow leads to straight filtering trajectories. In addition, we introduce a DistanceModule that scales the straight trajectory using an estimated distance scalar to attain convergence near the clean surface. Our network is lightweight and only has $sim530K$ parameters, being 17% of IterativePFN (a most recent point cloud filtering network). Extensive experiments on both synthetic and real-world data show our method achieves state-of-the-art results. Our method also demonstrates nice distributions of filtered points without the need for regularization. The implementation code can be found at: https://github.com/ddsediri/StraightPCF.
Read more5/15/2024

0
On-the-fly Point Feature Representation for Point Clouds Analysis
Jiangyi Wang, Zhongyao Cheng, Na Zhao, Jun Cheng, Xulei Yang
Point cloud analysis is challenging due to its unique characteristics of unorderness, sparsity and irregularity. Prior works attempt to capture local relationships by convolution operations or attention mechanisms, exploiting geometric information from coordinates implicitly. These methods, however, are insufficient to describe the explicit local geometry, e.g., curvature and orientation. In this paper, we propose On-the-fly Point Feature Representation (OPFR), which captures abundant geometric information explicitly through Curve Feature Generator module. This is inspired by Point Feature Histogram (PFH) from computer vision community. However, the utilization of vanilla PFH encounters great difficulties when applied to large datasets and dense point clouds, as it demands considerable time for feature generation. In contrast, we introduce the Local Reference Constructor module, which approximates the local coordinate systems based on triangle sets. Owing to this, our OPFR only requires extra 1.56ms for inference (65x faster than vanilla PFH) and 0.012M more parameters, and it can serve as a versatile plug-and-play module for various backbones, particularly MLP-based and Transformer-based backbones examined in this study. Additionally, we introduce the novel Hierarchical Sampling module aimed at enhancing the quality of triangle sets, thereby ensuring robustness of the obtained geometric features. Our proposed method improves overall accuracy (OA) on ModelNet40 from 90.7% to 94.5% (+3.8%) for classification, and OA on S3DIS Area-5 from 86.4% to 90.0% (+3.6%) for semantic segmentation, respectively, building upon PointNet++ backbone. When integrated with Point Transformer backbone, we achieve state-of-the-art results on both tasks: 94.8% OA on ModelNet40 and 91.7% OA on S3DIS Area-5.
Read more8/13/2024
0
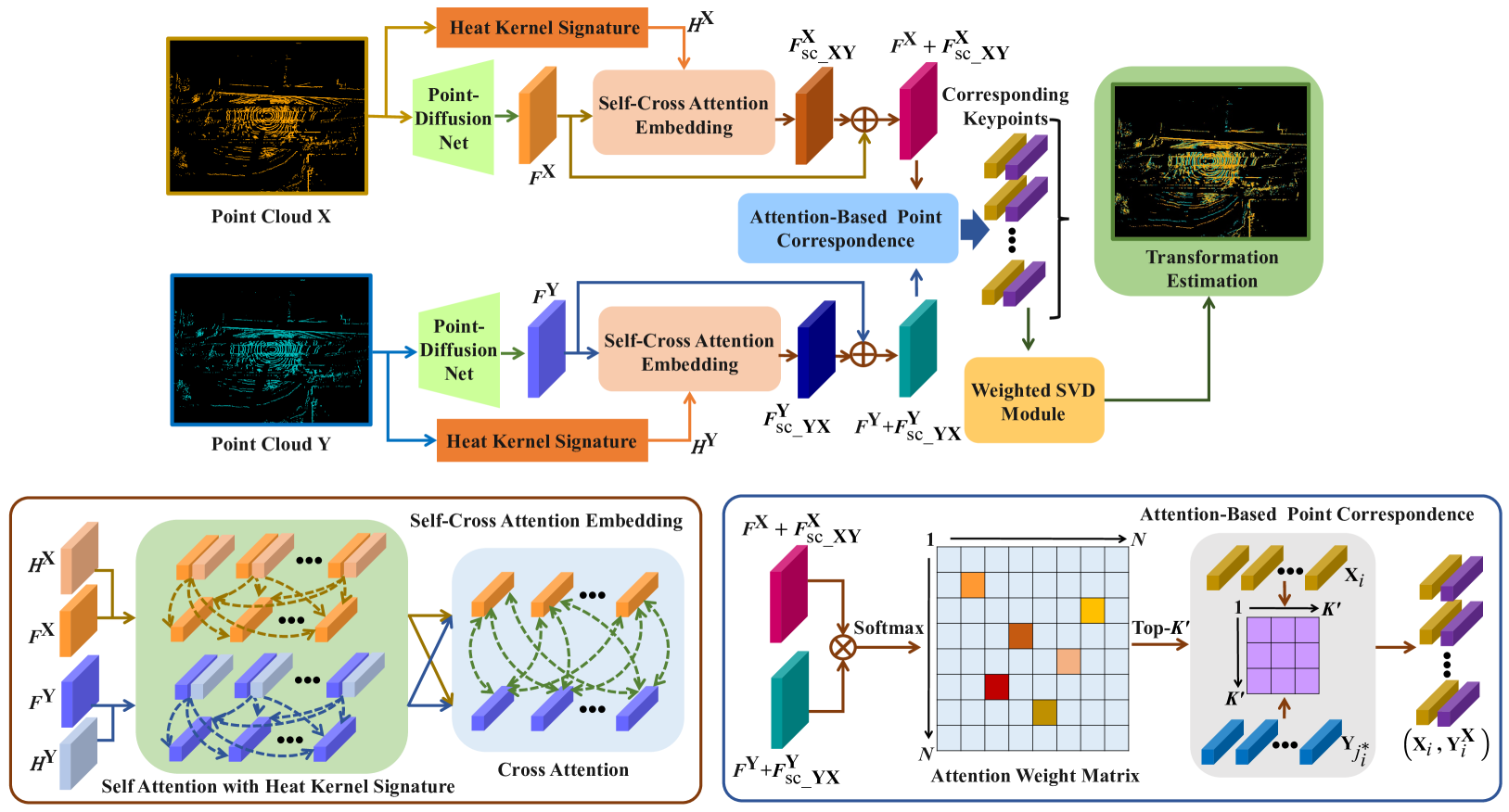
PointDifformer: Robust Point Cloud Registration With Neural Diffusion and Transformer
Rui She, Qiyu Kang, Sijie Wang, Wee Peng Tay, Kai Zhao, Yang Song, Tianyu Geng, Yi Xu, Diego Navarro Navarro, Andreas Hartmannsgruber
Point cloud registration is a fundamental technique in 3-D computer vision with applications in graphics, autonomous driving, and robotics. However, registration tasks under challenging conditions, under which noise or perturbations are prevalent, can be difficult. We propose a robust point cloud registration approach that leverages graph neural partial differential equations (PDEs) and heat kernel signatures. Our method first uses graph neural PDE modules to extract high dimensional features from point clouds by aggregating information from the 3-D point neighborhood, thereby enhancing the robustness of the feature representations. Then, we incorporate heat kernel signatures into an attention mechanism to efficiently obtain corresponding keypoints. Finally, a singular value decomposition (SVD) module with learnable weights is used to predict the transformation between two point clouds. Empirical experiments on a 3-D point cloud dataset demonstrate that our approach not only achieves state-of-the-art performance for point cloud registration but also exhibits better robustness to additive noise or 3-D shape perturbations.
Read more4/23/2024

0
CF-PRNet: Coarse-to-Fine Prototype Refining Network for Point Cloud Completion and Reconstruction
Zhi Chen, Tianqi Wei, Zecheng Zhao, Jia Syuen Lim, Yadan Luo, Hu Zhang, Xin Yu, Scott Chapman, Zi Huang
In modern agriculture, precise monitoring of plants and fruits is crucial for tasks such as high-throughput phenotyping and automated harvesting. This paper addresses the challenge of reconstructing accurate 3D shapes of fruits from partial views, which is common in agricultural settings. We introduce CF-PRNet, a coarse-to-fine prototype refining network, leverages high-resolution 3D data during the training phase but requires only a single RGB-D image for real-time inference. Our approach begins by extracting the incomplete point cloud data that constructed from a partial view of a fruit with a series of convolutional blocks. The extracted features inform the generation of scaling vectors that refine two sequentially constructed 3D mesh prototypes - one coarse and one fine-grained. This progressive refinement facilitates the detailed completion of the final point clouds, achieving detailed and accurate reconstructions. CF-PRNet demonstrates excellent performance metrics with a Chamfer Distance of 3.78, an F1 Score of 66.76%, a Precision of 56.56%, and a Recall of 85.31%, and win the first place in the Shape Completion and Reconstruction of Sweet Peppers Challenge.
Read more9/16/2024