A Strong Baseline for Point Cloud Registration via Direct Superpoints Matching

0

Sign in to get full access
Point cloud registration is the process of aligning two or more point clouds representing the same scene or object. This paper proposes a new method called Direct Superpoints Matching for fast and robust point cloud registration.
The key idea is to divide the point clouds into superpoints (groups of points) and match these superpoints directly, instead of matching individual points. This reduces the complexity of the problem and makes the registration process more efficient.
The method begins by oversegmenting the point clouds into superpoints using a simple clustering algorithm. It then computes local descriptors for each superpoint, capturing its geometric properties.
The registration is performed by finding correspondences between the superpoints of the two point clouds based on their descriptors. An optimization process is then used to estimate the rigid transformation that best aligns the corresponding superpoints.
The proposed method is fast, as it operates on a reduced number of superpoints instead of individual points. It is also robust to noise, outliers, and partial overlap between the point clouds, thanks to the use of superpoints and local descriptors.
The paper presents experimental results on various benchmark datasets, demonstrating the effectiveness of the proposed method compared to other state-of-the-art approaches, particularly in terms of registration accuracy and computational efficiency.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
A Strong Baseline for Point Cloud Registration via Direct Superpoints Matching
Aniket Gupta, Yiming Xie, Hanumant Singh, Huaizu Jiang
Deep neural networks endow the downsampled superpoints with highly discriminative feature representations. Previous dominant point cloud registration approaches match these feature representations as the first step, e.g., using the Sinkhorn algorithm. A RANSAC-like method is then usually adopted as a post-processing refinement to filter the outliers. Other dominant method is to directly predict the superpoint matchings using learned MLP layers. Both of them have drawbacks: RANSAC-based methods are computationally intensive and prediction-based methods suffer from outputing non-existing points in the point cloud. In this paper, we propose a straightforward and effective baseline to find correspondences of superpoints in a global matching manner. We employ the normalized matching scores as weights for each correspondence, allowing us to reject the outliers and further weigh the rest inliers when fitting the transformation matrix without relying on the cumbersome RANSAC. Moreover, the entire model can be trained in an end-to-end fashion, leading to better accuracy. Our simple yet effective baseline shows comparable or even better results than state-of-the-art methods on three datasets including ModelNet, 3DMatch, and KITTI. We do not advocate our approach to be emph{the} solution for point cloud registration but use the results to emphasize the role of matching strategy for point cloud registration. The code and models are available at https://github.com/neu-vi/Superpoints_Registration.
Read more4/1/2024

0
Unsupervised Point Cloud Registration with Self-Distillation
Christian Lowens, Thorben Funke, Andr'e Wagner, Alexandru Paul Condurache
Rigid point cloud registration is a fundamental problem and highly relevant in robotics and autonomous driving. Nowadays deep learning methods can be trained to match a pair of point clouds, given the transformation between them. However, this training is often not scalable due to the high cost of collecting ground truth poses. Therefore, we present a self-distillation approach to learn point cloud registration in an unsupervised fashion. Here, each sample is passed to a teacher network and an augmented view is passed to a student network. The teacher includes a trainable feature extractor and a learning-free robust solver such as RANSAC. The solver forces consistency among correspondences and optimizes for the unsupervised inlier ratio, eliminating the need for ground truth labels. Our approach simplifies the training procedure by removing the need for initial hand-crafted features or consecutive point cloud frames as seen in related methods. We show that our method not only surpasses them on the RGB-D benchmark 3DMatch but also generalizes well to automotive radar, where classical features adopted by others fail. The code is available at https://github.com/boschresearch/direg .
Read more9/14/2024
0
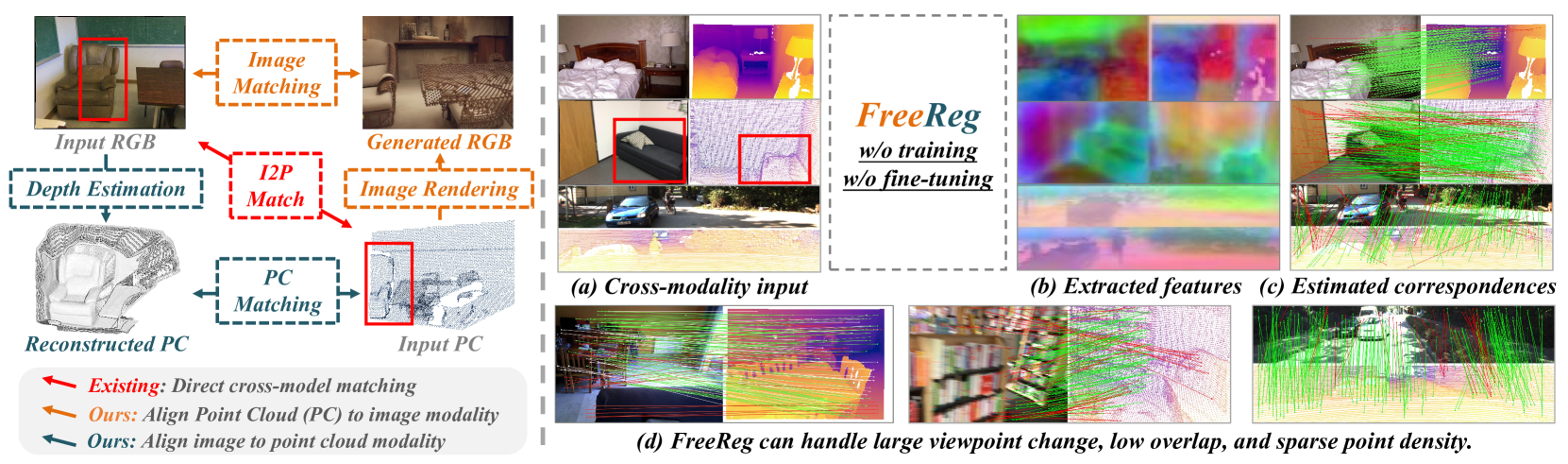
FreeReg: Image-to-Point Cloud Registration Leveraging Pretrained Diffusion Models and Monocular Depth Estimators
Haiping Wang, Yuan Liu, Bing Wang, Yujing Sun, Zhen Dong, Wenping Wang, Bisheng Yang
Matching cross-modality features between images and point clouds is a fundamental problem for image-to-point cloud registration. However, due to the modality difference between images and points, it is difficult to learn robust and discriminative cross-modality features by existing metric learning methods for feature matching. Instead of applying metric learning on cross-modality data, we propose to unify the modality between images and point clouds by pretrained large-scale models first, and then establish robust correspondence within the same modality. We show that the intermediate features, called diffusion features, extracted by depth-to-image diffusion models are semantically consistent between images and point clouds, which enables the building of coarse but robust cross-modality correspondences. We further extract geometric features on depth maps produced by the monocular depth estimator. By matching such geometric features, we significantly improve the accuracy of the coarse correspondences produced by diffusion features. Extensive experiments demonstrate that without any task-specific training, direct utilization of both features produces accurate image-to-point cloud registration. On three public indoor and outdoor benchmarks, the proposed method averagely achieves a 20.6 percent improvement in Inlier Ratio, a three-fold higher Inlier Number, and a 48.6 percent improvement in Registration Recall than existing state-of-the-arts.
Read more4/16/2024

0
ML-SemReg: Boosting Point Cloud Registration with Multi-level Semantic Consistency
Shaocheng Yan, Pengcheng Shi, Jiayuan Li
Recent advances in point cloud registration mostly leverage geometric information. Although these methods have yielded promising results, they still struggle with problems of low overlap, thus limiting their practical usage. In this paper, we propose ML-SemReg, a plug-and-play point cloud registration framework that fully exploits semantic information. Our key insight is that mismatches can be categorized into two types, i.e., inter- and intra-class, after rendering semantic clues, and can be well addressed by utilizing multi-level semantic consistency. We first propose a Group Matching module to address inter-class mismatching, outputting multiple matching groups that inherently satisfy Local Semantic Consistency. For each group, a Mask Matching module based on Scene Semantic Consistency is then introduced to suppress intra-class mismatching. Benefit from those two modules, ML-SemReg generates correspondences with a high inlier ratio. Extensive experiments demonstrate excellent performance and robustness of ML-SemReg, e.g., in hard-cases of the KITTI dataset, the Registration Recall of MAC increases by almost 34 percentage points when our ML-SemReg is equipped. Code is available at url{https://github.com/Laka-3DV/ML-SemReg}
Read more7/16/2024