Task-Oriented Dexterous Hand Pose Synthesis Using Differentiable Grasp Wrench Boundary Estimator

0
Sign in to get full access
Overview
- This paper presents a method for task-oriented dexterous grasp synthesis using a differentiable grasp wrench boundary estimator.
- The proposed approach aims to generate stable and versatile grasps that can effectively perform various tasks, such as those required in robotics applications or object manipulation.
- The method optimizes grasp configurations by considering the task-specific requirements, represented by a wrench space, and the hand's capabilities, modeled by a differentiable grasp wrench boundary estimator.
Plain English Explanation
The paper introduces a new way to help robots grasp and manipulate objects more effectively. Robots often need to perform specific tasks with objects, like picking up a cup or turning a wrench. The researchers developed a system that can find the best way for a robot's hand to grab an object based on the task at hand.
The key idea is to use a differentiable model that can estimate the range of forces and torques (called the "wrench boundary") that the robot's hand can apply to the object. This allows the system to optimize the grasp configuration to best match the required task, resulting in more stable and versatile grasps.
For example, if the task is to tighten a bolt, the system would find a grasp that allows the robot to apply the necessary torque, rather than just maximizing the overall grip strength. This task-oriented approach contrasts with more generic grasp planning methods that may not consider the specific requirements of the desired manipulation.
Technical Explanation
The paper proposes a novel approach for task-oriented dexterous grasp synthesis, which aims to generate stable and versatile grasps that can effectively perform various manipulation tasks. The core of the method is a differentiable grasp wrench boundary estimator that models the hand's capabilities in terms of the range of forces and torques it can apply to the object.
The grasp optimization process involves finding a grasp configuration that not only ensures a stable grip on the object, but also aligns with the task-specific requirements represented by a wrench space. This wrench space encodes the desired forces and torques needed to successfully complete the task, such as turning a screwdriver or picking up a delicate object.
By using a differentiable model for the grasp wrench boundary, the system can efficiently optimize the grasp parameters to maximize the overlap between the hand's capabilities and the task requirements. This allows the method to generate grasps that are tailored to the specific manipulation needs, in contrast with more generic grasp planning approaches that may not consider task-specific constraints.
The authors demonstrate the effectiveness of their approach through experiments on a variety of objects and tasks, showing that the task-oriented grasps outperform traditional grasp planning methods in terms of task success rates and other relevant metrics.
Critical Analysis
The paper presents a compelling approach to task-oriented dexterous grasp synthesis, addressing an important challenge in robotics and object manipulation. The use of a differentiable grasp wrench boundary estimator is a key innovation, as it allows for efficient optimization of grasp configurations to match task-specific requirements.
One potential limitation of the approach is the reliance on accurate modeling of the hand's capabilities, as represented by the grasp wrench boundary. In practice, this model may not fully capture the complex dynamics and uncertainties involved in real-world manipulation tasks. Additionally, the paper does not explore the sensitivity of the method to variations in the hand or object parameters, which could be an important consideration for practical deployment.
Further research could investigate ways to generalize the grasp synthesis process to a wider range of hand designs and task requirements, potentially leveraging more advanced learning-based techniques. Incorporating feedback from physical experiments or simulations could also help refine the grasp wrench boundary estimator and improve the overall robustness of the method.
Conclusion
This paper presents a novel approach for task-oriented dexterous grasp synthesis that leverages a differentiable grasp wrench boundary estimator. The key contribution is the ability to optimize grasp configurations to not only ensure a stable grip, but also align with the specific requirements of the manipulation task at hand.
The proposed method has the potential to significantly improve the versatility and effectiveness of robotic manipulation systems, enabling them to perform a wider range of tasks with greater dexterity and precision. As robotics and object interaction continue to advance, techniques like the one described in this paper will be increasingly important for developing capable and adaptable robotic systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Task-Oriented Dexterous Hand Pose Synthesis Using Differentiable Grasp Wrench Boundary Estimator
Jiayi Chen, Yuxing Chen, Jialiang Zhang, He Wang
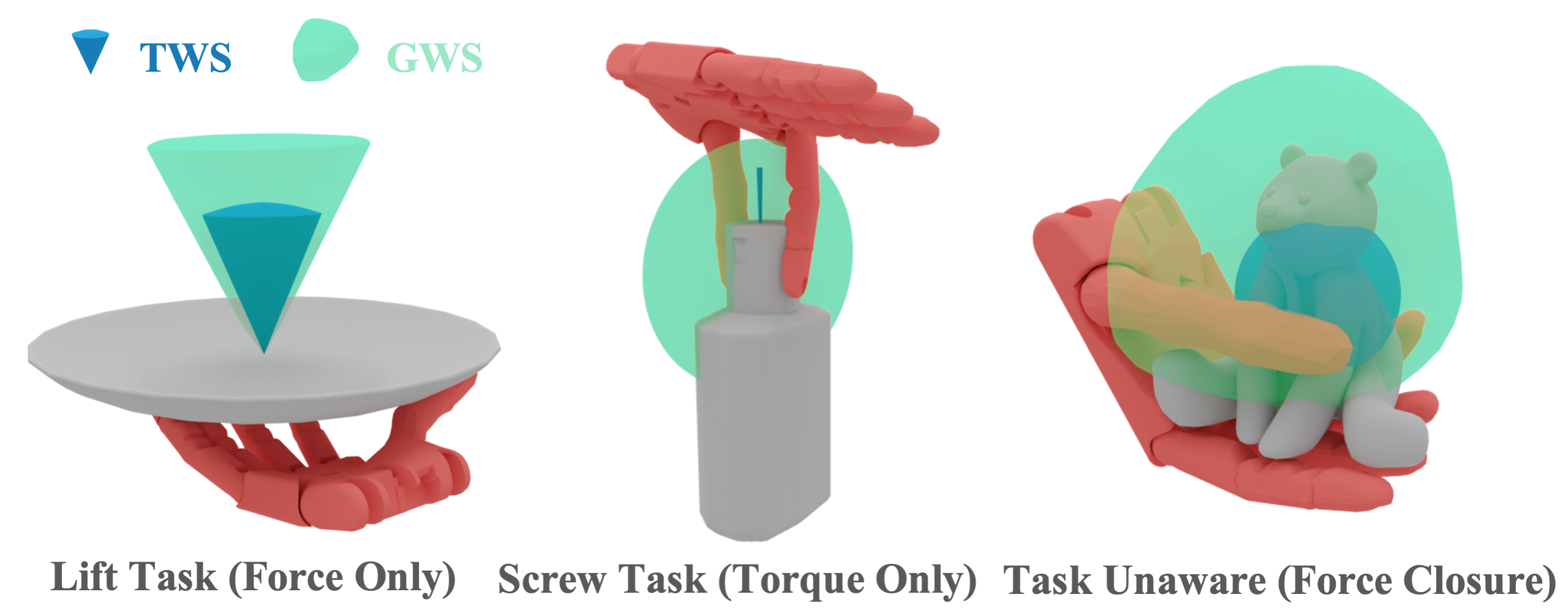
This work tackles the problem of task-oriented dexterous hand pose synthesis, which involves generating a static hand pose capable of applying a task-specific set of wrenches to manipulate objects. Unlike previous approaches that focus solely on force-closure grasps, which are unsuitable for non-prehensile manipulation tasks (textit{e.g.}, turning a knob or pressing a button), we introduce a unified framework covering force-closure grasps, non-force-closure grasps, and a variety of non-prehensile poses. Our key idea is a novel optimization objective quantifying the disparity between the Task Wrench Space (TWS, the desired wrenches predefined as a task prior) and the Grasp Wrench Space (GWS, the achievable wrenches computed from the current hand pose). By minimizing this objective, gradient-based optimization algorithms can synthesize task-oriented hand poses without additional human demonstrations. Our specific contributions include 1) a fast, accurate, and differentiable technique for estimating the GWS boundary; 2) a task-oriented objective function based on the disparity between the estimated GWS boundary and the provided TWS boundary; and 3) an efficient implementation of the synthesis pipeline that leverages CUDA accelerations and supports large-scale paralleling. Experimental results on 10 diverse tasks demonstrate a 72.6% success rate in simulation. Furthermore, real-world validation for 4 tasks confirms the effectiveness of synthesized poses for manipulation. Notably, despite being primarily tailored for task-oriented hand pose synthesis, our pipeline can generate force-closure grasps 50 times faster than DexGraspNet while maintaining comparable grasp quality. Project page: https://pku-epic.github.io/TaskDexGrasp/.
Read more4/9/2024
0
DexGANGrasp: Dexterous Generative Adversarial Grasping Synthesis for Task-Oriented Manipulation
Qian Feng, David S. Martinez Lema, Mohammadhossein Malmir, Hang Li, Jianxiang Feng, Zhaopeng Chen, Alois Knoll
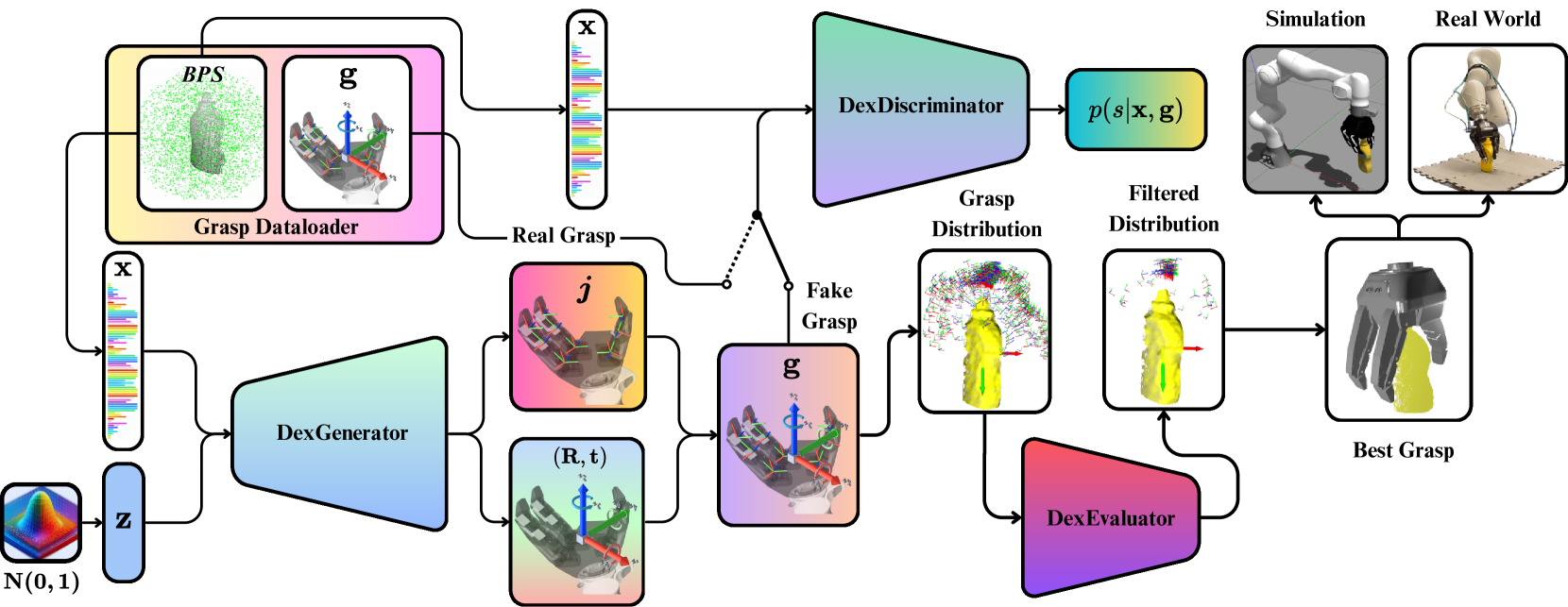
We introduce DexGanGrasp, a dexterous grasping synthesis method that generates and evaluates grasps with single view in real time. DexGanGrasp comprises a Conditional Generative Adversarial Networks (cGANs)-based DexGenerator to generate dexterous grasps and a discriminator-like DexEvalautor to assess the stability of these grasps. Extensive simulation and real-world expriments showcases the effectiveness of our proposed method, outperforming the baseline FFHNet with an 18.57% higher success rate in real-world evaluation. We further extend DexGanGrasp to DexAfford-Prompt, an open-vocabulary affordance grounding pipeline for dexterous grasping leveraging Multimodal Large Language Models (MLLMs) and Vision Language Models (VLMs), to achieve task-oriented grasping with successful real-world deployments.
Read more7/25/2024

0
3D Whole-body Grasp Synthesis with Directional Controllability
Georgios Paschalidis, Romana Wilschut, Dimitrije Anti'c, Omid Taheri, Dimitrios Tzionas
Synthesizing 3D whole-bodies that realistically grasp objects is useful for animation, mixed reality, and robotics. This is challenging, because the hands and body need to look natural w.r.t. each other, the grasped object, as well as the local scene (i.e., a receptacle supporting the object). Only recent work tackles this, with a divide-and-conquer approach; it first generates a guiding right-hand grasp, and then searches for bodies that match this. However, the guiding-hand synthesis lacks controllability and receptacle awareness, so it likely has an implausible direction (i.e., a body can't match this without penetrating the receptacle) and needs corrections through major post-processing. Moreover, the body search needs exhaustive sampling and is expensive. These are strong limitations. We tackle these with a novel method called CWGrasp. Our key idea is that performing geometry-based reasoning early on, instead of too late, provides rich control signals for inference. To this end, CWGrasp first samples a plausible reaching-direction vector (used later for both the arm and hand) from a probabilistic model built via raycasting from the object and collision checking. Then, it generates a reaching body with a desired arm direction, as well as a guiding grasping hand with a desired palm direction that complies with the arm's one. Eventually, CWGrasp refines the body to match the guiding hand, while plausibly contacting the scene. Notably, generating already-compatible parts greatly simplifies the whole. Moreover, CWGrasp uniquely tackles both right- and left-hand grasps. We evaluate on the GRAB and ReplicaGrasp datasets. CWGrasp outperforms baselines, at lower runtime and budget, while all components help performance. Code and models will be released.
Read more8/30/2024

0
SpringGrasp: An optimization pipeline for robust and compliant dexterous pre-grasp synthesis
Sirui Chen, Jeannette Bohg, C. Karen Liu
Generating stable and robust grasps on arbitrary objects is critical for dexterous robotic hands, marking a significant step towards advanced dexterous manipulation. Previous studies have mostly focused on improving differentiable grasping metrics with the assumption of precisely known object geometry. However, shape uncertainty is ubiquitous due to noisy and partial shape observations, which introduce challenges in grasp planning. We propose, SpringGrasp planner, a planner that considers uncertain observations of the object surface for synthesizing compliant dexterous grasps. A compliant dexterous grasp could minimize the effect of unexpected contact with the object, leading to more stable grasp with shape-uncertain objects. We introduce an analytical and differentiable metric, SpringGrasp metric, that evaluates the dynamic behavior of the entire compliant grasping process. Planning with SpringGrasp planner, our method achieves a grasp success rate of 89% from two viewpoints and 84% from a single viewpoints in experiment with a real robot on 14 common objects. Compared with a force-closure based planner, our method achieves at least 18% higher grasp success rate.
Read more4/26/2024