TLDR: Unsupervised Goal-Conditioned RL via Temporal Distance-Aware Representations

0

Sign in to get full access
Overview
- This paper proposes a new method for unsupervised goal-conditioned reinforcement learning (RL) called Temporal Distance-Aware Representations (TDAR).
- TDAR learns representations that capture temporal distance information, which is used to guide the RL agent towards achieving its goals without requiring any supervised goal labels.
- The key innovation is leveraging the temporal structure of the environment to learn useful representations, rather than relying on predefined goals or rewards.
Plain English Explanation
The researchers have developed a new way for artificial intelligence (AI) systems to learn how to achieve their goals without being explicitly told what those goals are. Typically, in reinforcement learning (RL), the AI agent is given a reward signal that tells it whether it is getting closer to or further from its goal. However, this requires the goal to be predefined, which can be limiting.
The GOPLAN: Goal-Conditioned Offline Reinforcement Learning method instead learns to represent the environment in a way that captures the temporal distance to different states. This means the AI can figure out for itself what states are "closer" or "further" from each other, without needing to know the end goal ahead of time.
The key insight is that by understanding the temporal structure of the environment - how states are connected over time - the AI can learn useful representations that allow it to navigate towards its goals more effectively. This is similar to how humans and animals can explore their environment and discover new goals, without being explicitly told what to do.
Technical Explanation
The core of the TDAR method is learning representations that capture the temporal distance between states in the environment. This is done by training an encoder network to predict the number of time steps between any two states in the environment, using unsupervised data.
The intuition is that states that are close together in time will have similar representations, while states that are further apart will have more distinct representations. This temporal distance information can then be used to guide the RL agent towards its goals, without requiring any predefined reward function or goal labels.
The Goal Exploration via Adaptive Skill Distribution and Guided Cooperation in Hierarchical Reinforcement Learning methods also leverage the temporal structure of the environment to learn useful representations for RL, but TDAR is unique in its specific focus on capturing temporal distance information.
The authors demonstrate the effectiveness of TDAR on several challenging continuous control tasks, where it outperforms other unsupervised goal-conditioned RL methods like LGR2: Language-Guided Reward Relabeling and Probabilistic Subgoal Representations.
Critical Analysis
One potential limitation of the TDAR approach is that it may struggle in environments with complex temporal dynamics, where the relationship between states and their temporal distance is not straightforward. The authors acknowledge this and suggest that incorporating additional information, such as the sensory inputs or the agent's actions, could help address this issue.
Another concern is that the temporal distance information learned by TDAR may not always align with the most meaningful or useful notions of "closeness" or "distance" for the agent's goals. The paper does not explore this potential mismatch in depth, and it would be valuable to investigate further how the learned representations relate to the agent's actual objectives.
Additionally, the paper does not provide a thorough analysis of the computational and sample efficiency of the TDAR method compared to other unsupervised goal-conditioned RL approaches. This information would be helpful for understanding the practical tradeoffs and determining the most suitable applications for the technique.
Conclusion
The TDAR method represents an interesting and promising approach to unsupervised goal-conditioned reinforcement learning. By learning representations that capture temporal distance information, the agent can navigate towards its goals without the need for predefined rewards or goal labels. This aligns with how humans and animals explore and discover new goals in their environments.
The authors have demonstrated the effectiveness of TDAR on several challenging tasks, but there are still opportunities to further refine and understand the limitations of the method. Addressing the potential issues around complex temporal dynamics and the alignment between learned representations and actual objectives could help expand the applicability of this technique. Overall, the TDAR method is a valuable contribution to the field of goal-directed reinforcement learning.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
TLDR: Unsupervised Goal-Conditioned RL via Temporal Distance-Aware Representations
Junik Bae, Kwanyoung Park, Youngwoon Lee
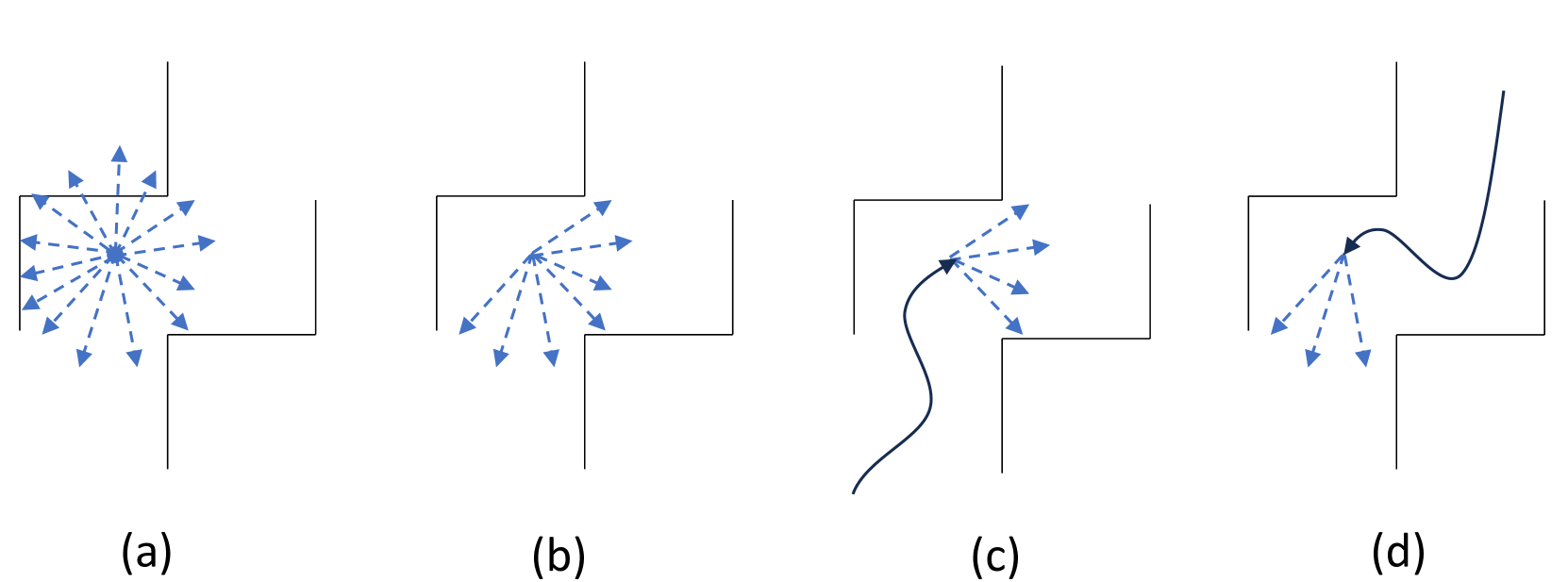
Unsupervised goal-conditioned reinforcement learning (GCRL) is a promising paradigm for developing diverse robotic skills without external supervision. However, existing unsupervised GCRL methods often struggle to cover a wide range of states in complex environments due to their limited exploration and sparse or noisy rewards for GCRL. To overcome these challenges, we propose a novel unsupervised GCRL method that leverages TemporaL Distance-aware Representations (TLDR). TLDR selects faraway goals to initiate exploration and computes intrinsic exploration rewards and goal-reaching rewards, based on temporal distance. Specifically, our exploration policy seeks states with large temporal distances (i.e. covering a large state space), while the goal-conditioned policy learns to minimize the temporal distance to the goal (i.e. reaching the goal). Our experimental results in six simulated robotic locomotion environments demonstrate that our method significantly outperforms previous unsupervised GCRL methods in achieving a wide variety of states.
Read more7/12/2024

0
Accelerating Goal-Conditioned RL Algorithms and Research
Micha{l} Bortkiewicz, W{l}adek Pa{l}ucki, Vivek Myers, Tadeusz Dziarmaga, Tomasz Arczewski, {L}ukasz Kuci'nski, Benjamin Eysenbach
Self-supervision has the potential to transform reinforcement learning (RL), paralleling the breakthroughs it has enabled in other areas of machine learning. While self-supervised learning in other domains aims to find patterns in a fixed dataset, self-supervised goal-conditioned reinforcement learning (GCRL) agents discover new behaviors by learning from the goals achieved during unstructured interaction with the environment. However, these methods have failed to see similar success, both due to a lack of data from slow environments as well as a lack of stable algorithms. We take a step toward addressing both of these issues by releasing a high-performance codebase and benchmark JaxGCRL for self-supervised GCRL, enabling researchers to train agents for millions of environment steps in minutes on a single GPU. The key to this performance is a combination of GPU-accelerated environments and a stable, batched version of the contrastive reinforcement learning algorithm, based on an infoNCE objective, that effectively makes use of this increased data throughput. With this approach, we provide a foundation for future research in self-supervised GCRL, enabling researchers to quickly iterate on new ideas and evaluate them in a diverse set of challenging environments. Website + Code: https://github.com/MichalBortkiewicz/JaxGCRL
Read more8/21/2024
🏅
0
GOPlan: Goal-conditioned Offline Reinforcement Learning by Planning with Learned Models
Mianchu Wang, Rui Yang, Xi Chen, Hao Sun, Meng Fang, Giovanni Montana
Offline Goal-Conditioned RL (GCRL) offers a feasible paradigm for learning general-purpose policies from diverse and multi-task offline datasets. Despite notable recent progress, the predominant offline GCRL methods, mainly model-free, face constraints in handling limited data and generalizing to unseen goals. In this work, we propose Goal-conditioned Offline Planning (GOPlan), a novel model-based framework that contains two key phases: (1) pretraining a prior policy capable of capturing multi-modal action distribution within the multi-goal dataset; (2) employing the reanalysis method with planning to generate imagined trajectories for funetuning policies. Specifically, we base the prior policy on an advantage-weighted conditioned generative adversarial network, which facilitates distinct mode separation, mitigating the pitfalls of out-of-distribution (OOD) actions. For further policy optimization, the reanalysis method generates high-quality imaginary data by planning with learned models for both intra-trajectory and inter-trajectory goals. With thorough experimental evaluations, we demonstrate that GOPlan achieves state-of-the-art performance on various offline multi-goal navigation and manipulation tasks. Moreover, our results highlight the superior ability of GOPlan to handle small data budgets and generalize to OOD goals.
Read more5/17/2024
0
Goal Exploration via Adaptive Skill Distribution for Goal-Conditioned Reinforcement Learning
Lisheng Wu, Ke Chen
Exploration efficiency poses a significant challenge in goal-conditioned reinforcement learning (GCRL) tasks, particularly those with long horizons and sparse rewards. A primary limitation to exploration efficiency is the agent's inability to leverage environmental structural patterns. In this study, we introduce a novel framework, GEASD, designed to capture these patterns through an adaptive skill distribution during the learning process. This distribution optimizes the local entropy of achieved goals within a contextual horizon, enhancing goal-spreading behaviors and facilitating deep exploration in states containing familiar structural patterns. Our experiments reveal marked improvements in exploration efficiency using the adaptive skill distribution compared to a uniform skill distribution. Additionally, the learned skill distribution demonstrates robust generalization capabilities, achieving substantial exploration progress in unseen tasks containing similar local structures.
Read more4/22/2024