Towards Scene Graph Anticipation

0

Sign in to get full access
Overview
- Summarizes a research paper on "Towards Scene Graph Anticipation"
- Covers the paper's key elements, including the experimental design, architecture, and insights
- Provides a plain English explanation of the content and a critical analysis of the research
- Discusses the potential implications and areas for further exploration
Plain English Explanation
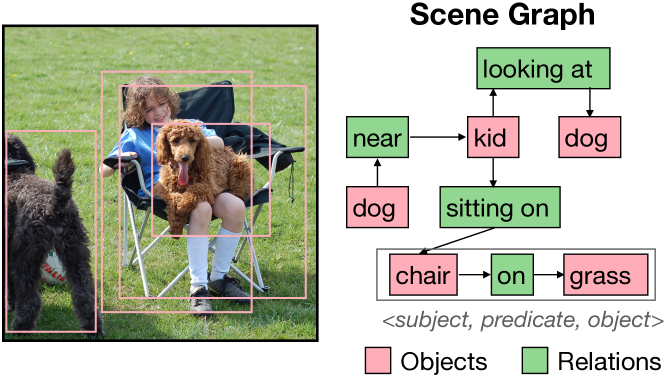
The research paper explores a technique called "Scene Graph Anticipation," which aims to help computers better understand and predict the relationships between objects in a visual scene. Scene graphs are a way of representing the objects in an image and how they interact with each other.
The researchers developed a model that can anticipate how a scene graph might change over time. By analyzing the current scene graph, the model can predict how the relationships between objects might evolve in the future. This could be useful for applications like real-time scene graph generation or anticipating object state changes.
The paper describes the architecture of the model and how it was trained and evaluated on a large dataset of scene graphs. The model was able to accurately predict future scene graph changes, demonstrating the potential of this approach for visual scene understanding.
Technical Explanation
The researchers developed a deep learning model that takes a scene graph as input and predicts how that scene graph might change over time. The model uses a graph neural network architecture to encode the current scene graph and then applies a series of differential equations to anticipate the future state of the graph.
The model was trained and evaluated on the STAR dataset, which contains a large collection of scene graphs derived from real-world images. The researchers used both qualitative and quantitative metrics to assess the model's performance, including its ability to accurately predict the addition, removal, and modification of graph nodes and edges.
The results showed that the model was able to effectively anticipate future scene graph changes, outperforming several baseline approaches. The researchers argue that this technique could have important applications in areas like robotics, autonomous vehicles, and video understanding, where the ability to predict how a scene will evolve over time could be crucial.
Critical Analysis
The research presented in this paper is a significant step forward in the field of scene understanding and anticipation. The authors have developed a novel approach that leverages graph neural networks and differential equations to capture the dynamic nature of visual scenes.
One potential limitation of the work is that it was evaluated on a single dataset, the STAR dataset, which may not fully represent the diversity of real-world scenes. Additionally, the paper does not explore the robustness of the model to noisy or incomplete input data, which could be an important consideration for practical applications.
Further research could also investigate the interpretability of the model's predictions, as understanding the underlying reasoning behind the anticipation of scene graph changes could be valuable for certain use cases. Exploring the model's ability to generalize to novel scenarios or to handle long-term temporal dependencies could also be fruitful avenues for future work.
Conclusion
The research paper presents a promising approach for anticipating changes in scene graphs, which could have important implications for a variety of applications in computer vision and robotics. The model's ability to accurately predict future scene graph changes demonstrates the potential of this technique for enhancing our understanding and reasoning about dynamic visual environments. As the field of scene understanding continues to advance, work like this will be crucial for developing more intelligent and responsive systems that can better anticipate and adapt to the evolving world around them.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Towards Scene Graph Anticipation
Rohith Peddi, Saksham Singh, Saurabh, Parag Singla, Vibhav Gogate
Spatio-temporal scene graphs represent interactions in a video by decomposing scenes into individual objects and their pair-wise temporal relationships. Long-term anticipation of the fine-grained pair-wise relationships between objects is a challenging problem. To this end, we introduce the task of Scene Graph Anticipation (SGA). We adapt state-of-the-art scene graph generation methods as baselines to anticipate future pair-wise relationships between objects and propose a novel approach SceneSayer. In SceneSayer, we leverage object-centric representations of relationships to reason about the observed video frames and model the evolution of relationships between objects. We take a continuous time perspective and model the latent dynamics of the evolution of object interactions using concepts of NeuralODE and NeuralSDE, respectively. We infer representations of future relationships by solving an Ordinary Differential Equation and a Stochastic Differential Equation, respectively. Extensive experimentation on the Action Genome dataset validates the efficacy of the proposed methods.
Read more7/22/2024
0
Adaptive Visual Scene Understanding: Incremental Scene Graph Generation
Naitik Khandelwal, Xiao Liu, Mengmi Zhang
Scene graph generation (SGG) involves analyzing images to extract meaningful information about objects and their relationships. Given the dynamic nature of the visual world, it becomes crucial for AI systems to detect new objects and establish their new relationships with existing objects. To address the lack of continual learning methodologies in SGG, we introduce the comprehensive Continual ScenE Graph Generation (CSEGG) dataset along with 3 learning scenarios and 8 evaluation metrics. Our research investigates the continual learning performances of existing SGG methods on the retention of previous object entities and relationships as they learn new ones. Moreover, we also explore how continual object detection enhances generalization in classifying known relationships on unknown objects. We conduct extensive experiments benchmarking and analyzing the classical two-stage SGG methods and the most recent transformer-based SGG methods in continual learning settings, and gain valuable insights into the CSEGG problem. We invite the research community to explore this emerging field of study.
Read more4/15/2024
0
Real-Time Scene Graph Generation
Maelic Neau, Paulo E. Santos, Karl Sammut, Anne-Gwenn Bosser, C'edric Buche
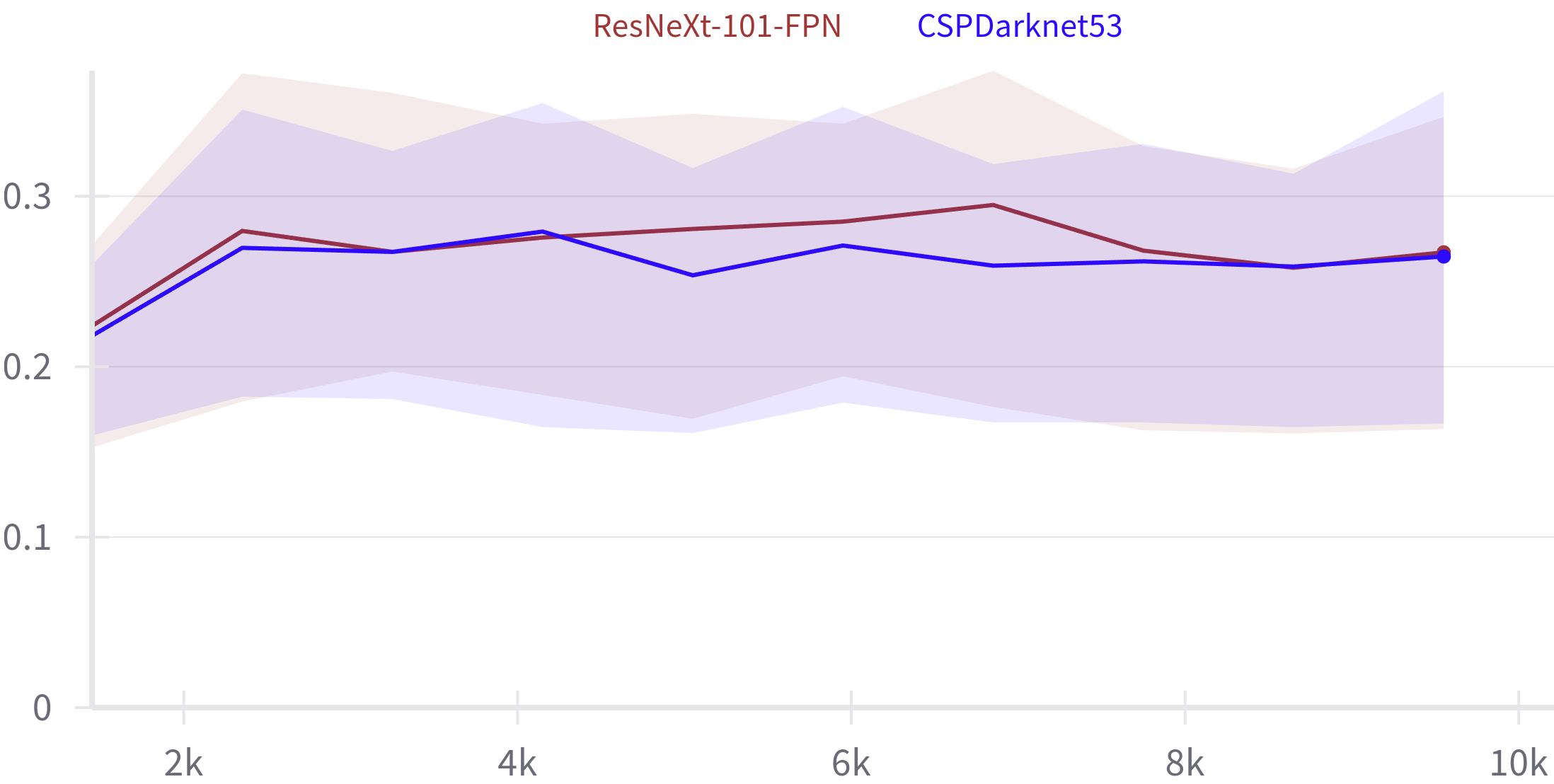
Scene Graph Generation (SGG) can extract abstract semantic relations between entities in images as graph representations. This task holds strong promises for other downstream tasks such as the embodied cognition of an autonomous agent. However, to power such applications, SGG needs to solve the gap of real-time latency. In this work, we propose to investigate the bottlenecks of current approaches for real-time constraint applications. Then, we propose a simple yet effective implementation of a real-time SGG approach using YOLOV8 as an object detection backbone. Our implementation is the first to obtain more than 48 FPS for the task with no loss of accuracy, successfully outperforming any other lightweight approaches. Our code is freely available at https://github.com/Maelic/SGG-Benchmark.
Read more5/28/2024

0
Scene Graph Generation in Large-Size VHR Satellite Imagery: A Large-Scale Dataset and A Context-Aware Approach
Yansheng Li, Linlin Wang, Tingzhu Wang, Xue Yang, Junwei Luo, Qi Wang, Youming Deng, Wenbin Wang, Xian Sun, Haifeng Li, Bo Dang, Yongjun Zhang, Yi Yu, Junchi Yan
Scene graph generation (SGG) in satellite imagery (SAI) benefits promoting understanding of geospatial scenarios from perception to cognition. In SAI, objects exhibit great variations in scales and aspect ratios, and there exist rich relationships between objects (even between spatially disjoint objects), which makes it attractive to holistically conduct SGG in large-size very-high-resolution (VHR) SAI. However, there lack such SGG datasets. Due to the complexity of large-size SAI, mining triplets heavily relies on long-range contextual reasoning. Consequently, SGG models designed for small-size natural imagery are not directly applicable to large-size SAI. This paper constructs a large-scale dataset for SGG in large-size VHR SAI with image sizes ranging from 512 x 768 to 27,860 x 31,096 pixels, named STAR (Scene graph generaTion in lArge-size satellite imageRy), encompassing over 210K objects and over 400K triplets. To realize SGG in large-size SAI, we propose a context-aware cascade cognition (CAC) framework to understand SAI regarding object detection (OBD), pair pruning and relationship prediction for SGG. We also release a SAI-oriented SGG toolkit with about 30 OBD and 10 SGG methods which need further adaptation by our devised modules on our challenging STAR dataset. The dataset and toolkit are available at: https://linlin-dev.github.io/project/STAR.
Read more7/4/2024