Real-Time Scene Graph Generation

0
Sign in to get full access
Overview
- This paper presents a system for generating real-time scene graphs from visual input.
- Scene graphs are compact representations of the objects, relationships, and attributes in a scene, which can be useful for various applications like image captioning, visual reasoning, and robotics.
- The proposed approach aims to generate these scene graphs efficiently and in real-time, making it practical for use in interactive systems.
Plain English Explanation
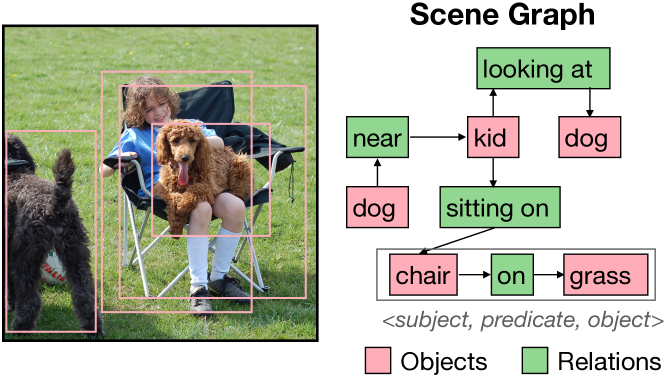
A scene graph is a way of representing the objects, their properties, and how they are related to each other in a visual scene. Imagine looking at a room - you might see a table, a chair, and a lamp. A scene graph would capture that information in a compact, structured format that a computer can understand.
The researchers in this paper have developed a system that can automatically generate these scene graphs from camera input, and do it quickly enough to work in real-time applications. This means the system can analyze a video feed or a series of images and continuously update the scene graph as objects, people, and relationships change.
Having this real-time scene graph information could be very useful for applications like adaptive visual scene understanding, text-to-image generation, or robotic control. The system could, for example, help a robot navigate a room by understanding where the furniture is and how it's arranged.
Technical Explanation
The core of the system is a deep learning model that takes in visual inputs like images or video frames and outputs a scene graph representation. This includes detecting the objects present, classifying their types, identifying relationships between them (e.g. "on top of", "beside"), and describing their attributes (e.g. color, size).
The researchers designed the model architecture and training process to optimize for real-time performance, using techniques like feature maps and efficient graph reasoning. This allows the system to process frames quickly and update the scene graph in sync with a live video feed.
Experiments showed the system can generate high-quality scene graphs in real-time, outperforming prior offline methods on standard benchmarks. The researchers also demonstrated the usefulness of the real-time scene graphs by integrating them into an application for interactive visual question answering.
Critical Analysis
One limitation mentioned in the paper is that the system's performance can degrade in complex, crowded scenes with many overlapping objects. This is a common challenge in visual understanding tasks, and the researchers suggest future work could explore ways to handle occlusion and clutter more effectively.
Additionally, the system is trained on a fixed set of object and relationship classes, so its knowledge is constrained by the training data. Extending it to handle open-vocabulary scene graph generation could broaden its applicability.
Overall, this work represents a meaningful step forward in bridging the gap between scene graph research and real-world, interactive applications. The real-time capabilities demonstrated here could unlock new possibilities for integrating scene graphs into end-to-end systems and leveraging scene co-occurrence knowledge to enhance performance.
Conclusion
This paper presents a novel system for generating real-time scene graphs from visual input, a capability that could be highly valuable for a range of interactive applications. By optimizing the model architecture and training process for efficiency, the researchers have shown it's possible to maintain high-quality scene understanding in a low-latency, continuous manner.
While there are still some limitations to address, this work represents an important advancement in bridging the gap between scene graph research and practical, real-world use cases. As the field continues to evolve, incorporating real-time scene graph generation into more end-to-end systems could unlock new possibilities for intelligent, context-aware interactions.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Real-Time Scene Graph Generation
Maelic Neau, Paulo E. Santos, Karl Sammut, Anne-Gwenn Bosser, C'edric Buche
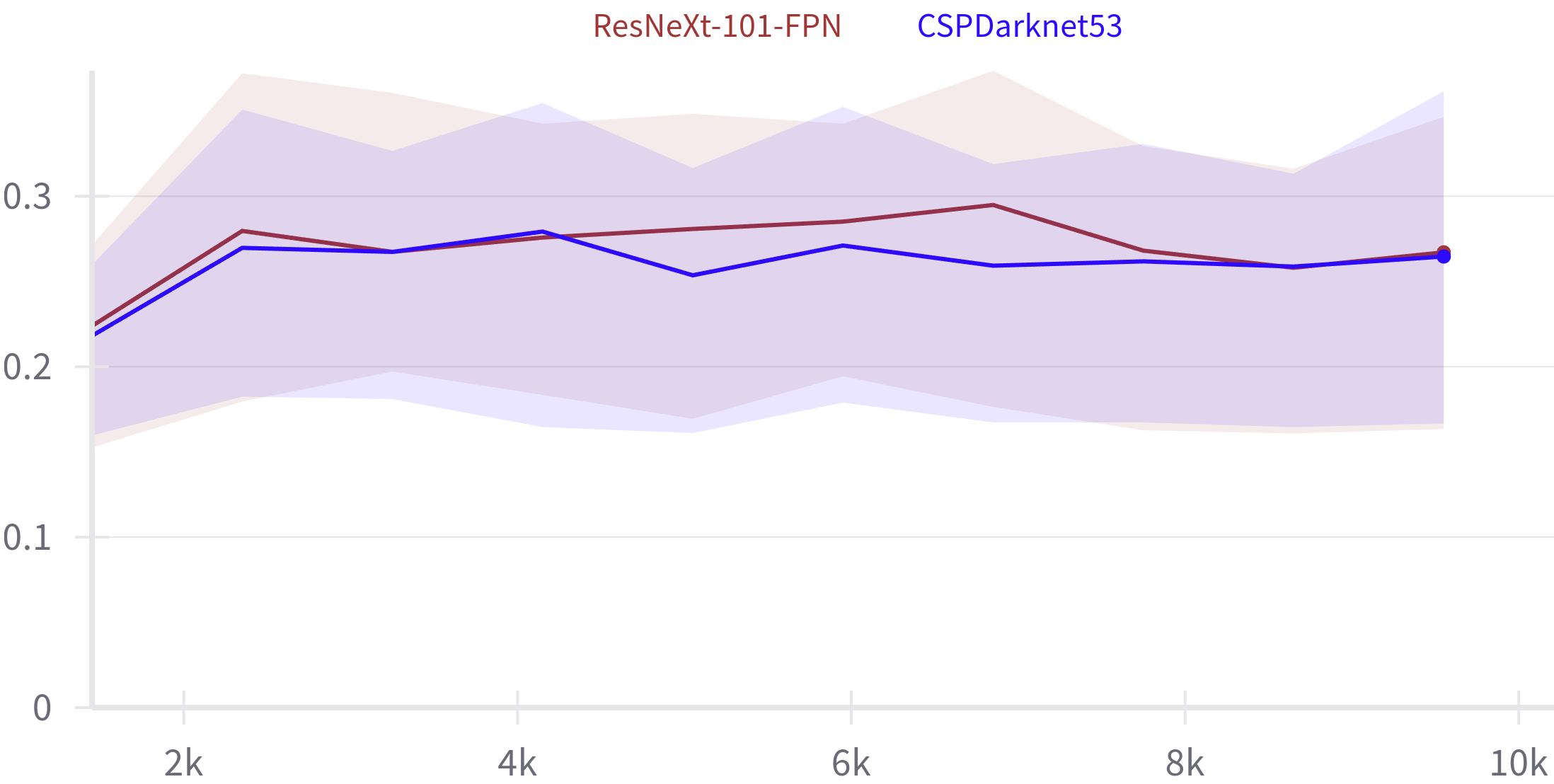
Scene Graph Generation (SGG) can extract abstract semantic relations between entities in images as graph representations. This task holds strong promises for other downstream tasks such as the embodied cognition of an autonomous agent. However, to power such applications, SGG needs to solve the gap of real-time latency. In this work, we propose to investigate the bottlenecks of current approaches for real-time constraint applications. Then, we propose a simple yet effective implementation of a real-time SGG approach using YOLOV8 as an object detection backbone. Our implementation is the first to obtain more than 48 FPS for the task with no loss of accuracy, successfully outperforming any other lightweight approaches. Our code is freely available at https://github.com/Maelic/SGG-Benchmark.
Read more5/28/2024
0
Adaptive Visual Scene Understanding: Incremental Scene Graph Generation
Naitik Khandelwal, Xiao Liu, Mengmi Zhang
Scene graph generation (SGG) involves analyzing images to extract meaningful information about objects and their relationships. Given the dynamic nature of the visual world, it becomes crucial for AI systems to detect new objects and establish their new relationships with existing objects. To address the lack of continual learning methodologies in SGG, we introduce the comprehensive Continual ScenE Graph Generation (CSEGG) dataset along with 3 learning scenarios and 8 evaluation metrics. Our research investigates the continual learning performances of existing SGG methods on the retention of previous object entities and relationships as they learn new ones. Moreover, we also explore how continual object detection enhances generalization in classifying known relationships on unknown objects. We conduct extensive experiments benchmarking and analyzing the classical two-stage SGG methods and the most recent transformer-based SGG methods in continual learning settings, and gain valuable insights into the CSEGG problem. We invite the research community to explore this emerging field of study.
Read more4/15/2024
0
From Pixels to Graphs: Open-Vocabulary Scene Graph Generation with Vision-Language Models
Rongjie Li, Songyang Zhang, Dahua Lin, Kai Chen, Xuming He
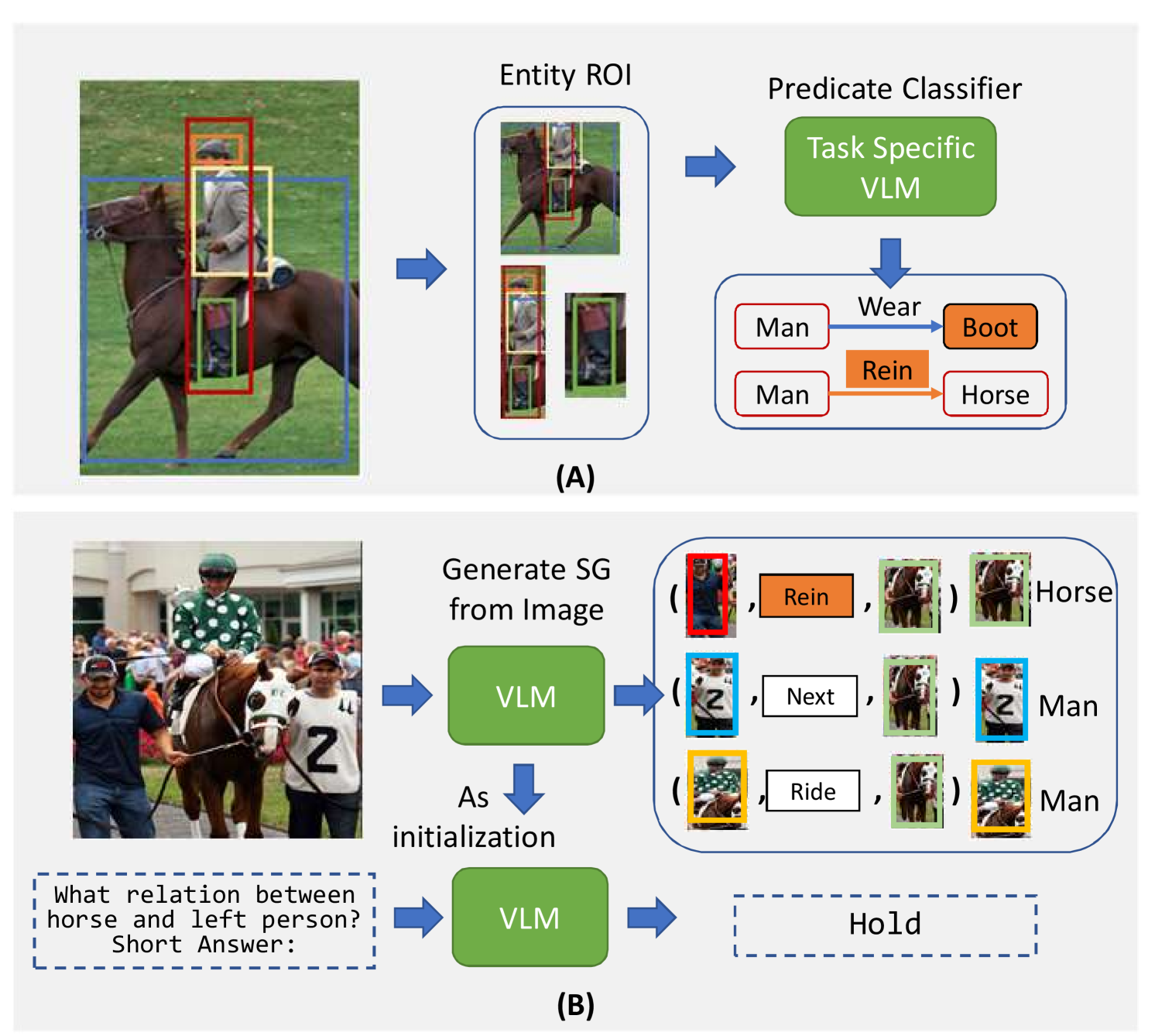
Scene graph generation (SGG) aims to parse a visual scene into an intermediate graph representation for downstream reasoning tasks. Despite recent advancements, existing methods struggle to generate scene graphs with novel visual relation concepts. To address this challenge, we introduce a new open-vocabulary SGG framework based on sequence generation. Our framework leverages vision-language pre-trained models (VLM) by incorporating an image-to-graph generation paradigm. Specifically, we generate scene graph sequences via image-to-text generation with VLM and then construct scene graphs from these sequences. By doing so, we harness the strong capabilities of VLM for open-vocabulary SGG and seamlessly integrate explicit relational modeling for enhancing the VL tasks. Experimental results demonstrate that our design not only achieves superior performance with an open vocabulary but also enhances downstream vision-language task performance through explicit relation modeling knowledge.
Read more4/9/2024

0
Towards Scene Graph Anticipation
Rohith Peddi, Saksham Singh, Saurabh, Parag Singla, Vibhav Gogate
Spatio-temporal scene graphs represent interactions in a video by decomposing scenes into individual objects and their pair-wise temporal relationships. Long-term anticipation of the fine-grained pair-wise relationships between objects is a challenging problem. To this end, we introduce the task of Scene Graph Anticipation (SGA). We adapt state-of-the-art scene graph generation methods as baselines to anticipate future pair-wise relationships between objects and propose a novel approach SceneSayer. In SceneSayer, we leverage object-centric representations of relationships to reason about the observed video frames and model the evolution of relationships between objects. We take a continuous time perspective and model the latent dynamics of the evolution of object interactions using concepts of NeuralODE and NeuralSDE, respectively. We infer representations of future relationships by solving an Ordinary Differential Equation and a Stochastic Differential Equation, respectively. Extensive experimentation on the Action Genome dataset validates the efficacy of the proposed methods.
Read more7/22/2024