Energy-based Contact Planning under Uncertainty for Robot Air Hockey

0

Sign in to get full access
Overview
- This paper presents an energy-based contact planning method for a robot playing the game of air hockey under uncertainty.
- The proposed approach aims to plan robot actions that minimize the total energy required for successful puck interactions while accounting for uncertainty in the puck's motion.
- The researchers tested their method on a physical robot air hockey testbed and compared its performance to a baseline approach.
Plain English Explanation
The researchers in this paper developed a new way for a robot to plan its actions when playing the game of air hockey. In air hockey, the robot needs to hit a small puck across the table in a way that scores points against its opponent.
The key idea is to plan the robot's movements based on minimizing the total amount of energy required for the robot to successfully hit and interact with the puck. This is important because the robot needs to react quickly to the puck's movements, and using less energy means the robot can move more efficiently.
The researchers also accounted for uncertainty in the puck's motion, which is an important factor in a fast-paced game like air hockey. By considering this uncertainty, the robot can make better decisions about how to hit the puck and score points.
The researchers tested their energy-based contact planning method on a physical robot air hockey system and compared its performance to a baseline approach. This allowed them to evaluate the benefits of their new technique in a real-world setting.
Technical Explanation
The paper presents an energy-based contact planning method for a robot playing the game of air hockey under uncertainty. The key idea is to plan the robot's actions to minimize the total energy required for successful puck interactions, while also accounting for uncertainty in the puck's motion.
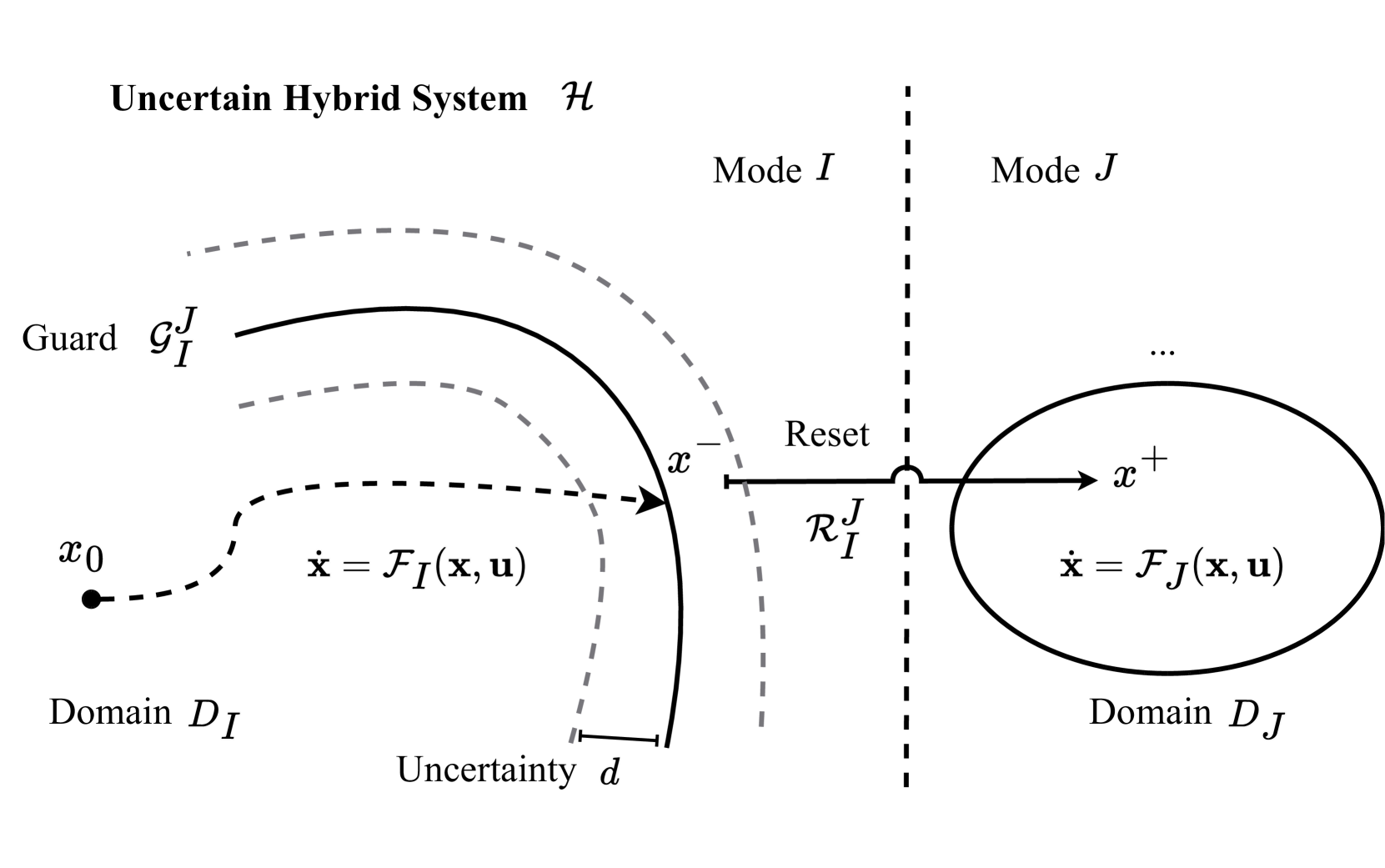
The researchers formulate the problem as a stochastic optimal control problem, where the goal is to find a sequence of robot actions that minimizes the expected energy consumption while ensuring the puck is successfully hit. They use a belief-space planning approach to model the uncertainty in the puck's state.
The paper also introduces a novel contact model for air hockey that captures the key dynamics of the puck-paddle interaction. This model is integrated into the planning framework to enable more accurate predictions of the puck's future trajectory.
The researchers evaluate their energy-based contact planning method on a physical robot air hockey testbed, and compare its performance to a baseline approach. The results demonstrate the benefits of their technique in terms of energy efficiency and successful puck interactions.
Critical Analysis
The paper presents a well-designed and thorough approach to robot air hockey planning under uncertainty. The researchers have carefully addressed key challenges, such as modeling the puck-paddle interaction and incorporating stochastic dynamics, to develop a practical solution.
However, the paper does not discuss some potential limitations or areas for further research. For example, the method may not generalize well to more complex air hockey scenarios, such as when multiple robots are playing together or when the table layout is changed. Additionally, the paper does not explore the computational efficiency of the planning algorithm, which could be an important factor in real-time applications.
Furthermore, the researchers could have provided more insight into the specific energy-based metrics they used and why they are appropriate for air hockey. A deeper discussion of the energy optimization objective and its implications would help readers better understand the significance of the approach.
Overall, the paper presents a promising and well-executed solution for robot air hockey planning, but there are opportunities for the authors to further explore the robustness, scalability, and broader implications of their method.
Conclusion
This paper introduces an energy-based contact planning approach for a robot playing the game of air hockey under uncertainty. The key innovation is the use of an energy minimization objective to guide the robot's actions, combined with a belief-space planning framework to account for uncertainty in the puck's motion.
The researchers demonstrate the effectiveness of their method on a physical robot air hockey testbed, showing improvements in energy efficiency and successful puck interactions compared to a baseline approach. This work represents an important step towards developing more sophisticated and adaptive robot air hockey systems that can excel in fast-paced, uncertain environments.
The energy-based planning technique presented in this paper could also have broader applications in other contact-rich robot manipulation tasks, where minimizing energy consumption while ensuring successful interactions is crucial. Further research is needed to explore the scalability and generalizability of this approach, but the authors have made a valuable contribution to the field of robot planning and control.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Energy-based Contact Planning under Uncertainty for Robot Air Hockey
Julius Jankowski, Ante Mari'c, Puze Liu, Davide Tateo, Jan Peters, Sylvain Calinon
Planning robot contact often requires reasoning over a horizon to anticipate outcomes, making such planning problems computationally expensive. In this letter, we propose a learning framework for efficient contact planning in real-time subject to uncertain contact dynamics. We implement our approach for the example task of robot air hockey. Based on a learned stochastic model of puck dynamics, we formulate contact planning for shooting actions as a stochastic optimal control problem with a chance constraint on hitting the goal. To achieve online re-planning capabilities, we propose to train an energy-based model to generate optimal shooting plans in real time. The performance of the trained policy is validated %in experiments both in simulation and on a real-robot setup. Furthermore, our approach was tested in a competitive setting as part of the NeurIPS 2023 Robot Air Hockey Challenge.
Read more7/8/2024
0
Trajectory Optimization under Contact Timing Uncertainties
Haizhou Zhao, Majid Khadiv
Most interesting problems in robotics (e.g., locomotion and manipulation) are realized through intermittent contact with the environment. Due to the perception and modeling errors, assuming an exact time for establishing contact with the environment is unrealistic. On the other hand, handling uncertainties in contact timing is notoriously difficult as it gives rise to either handling uncertain complementarity systems or solving combinatorial optimization problems at run-time. This work presents a novel optimal control formulation to find robust control policies under contact timing uncertainties. Our main novelty lies in casting the stochastic problem to a deterministic optimization over the uncertainty set that ensures robustness criterion satisfaction of candidate pre-contact states and optimizes for contact-relevant objectives. This way, we only need to solve a manageable standard nonlinear programming problem without complementarity constraints or combinatorial explosion. Our simulation results on multiple simplified locomotion and manipulation tasks demonstrate the robustness of our uncertainty-aware formulation compared to the nominal optimal control formulation.
Read more7/17/2024

0
Learning feasible transitions for efficient contact planning
Rikhat Akizhanov, Victor Dh'edin, Majid Khadiv, Ivan Laptev
Contact planning for legged robots in extremely constrained environments is challenging. The main difficulty stems from the mixed nature of the problem, discrete search together with continuous trajectory optimization. To speed up the discrete search problem, we propose in this paper to learn the properties of transitions from one contact mode to the next. In particular, we learn a feasibility classifier and an offset network; the former predicts if a potential next contact state is feasible from the current contact state, while the latter learns to compensate for misalignment in achieving a desired contact state due to imperfections of the low-level control. We integrate these learned networks in a Monte Carlo Tree Search (MCTS) contact planner to better prune the tree and improve the heuristic. Our simulation results demonstrate that training these networks with offline data significantly speeds up the online search process and improves its accuracy.
Read more7/17/2024

0
Learning to Play Air Hockey with Model-Based Deep Reinforcement Learning
Andrej Orsula
In the context of addressing the Robot Air Hockey Challenge 2023, we investigate the applicability of model-based deep reinforcement learning to acquire a policy capable of autonomously playing air hockey. Our agents learn solely from sparse rewards while incorporating self-play to iteratively refine their behaviour over time. The robotic manipulator is interfaced using continuous high-level actions for position-based control in the Cartesian plane while having partial observability of the environment with stochastic transitions. We demonstrate that agents are prone to overfitting when trained solely against a single playstyle, highlighting the importance of self-play for generalization to novel strategies of unseen opponents. Furthermore, the impact of the imagination horizon is explored in the competitive setting of the highly dynamic game of air hockey, with longer horizons resulting in more stable learning and better overall performance.
Read more6/4/2024