Translating Images to Road Network: A Sequence-to-Sequence Perspective

0
📊
Sign in to get full access
Overview
- Road network extraction is crucial for generating high-definition maps.
- Existing methods struggle to effectively merge Euclidean (e.g., road landmarks location) and non-Euclidean (e.g., road topological connectivity) data domains.
- This work proposes a unified representation called RoadNet Sequence to model both data domains.
- A non-autoregressive sequence-to-sequence approach is developed to leverage non-autoregressive dependencies while addressing auto-regressive dependencies.
- Topology-Inherited Training and the use of prior information from open-source maps are introduced to improve landmark detection and topology reasoning.
Plain English Explanation
High-definition maps require accurate information about road networks, including the locations of road landmarks and how they are connected. However, collecting and representing this information is challenging because the data has two different structures: Euclidean (e.g., coordinates of landmarks) and non-Euclidean (e.g., the topology or connectivity of the road network).
This research proposes a new way to represent both types of data using a unified format called the RoadNet Sequence. This allows the use of a specialized machine learning model, called a non-autoregressive sequence-to-sequence model, to better understand the road network information.
Additionally, the researchers identified two main issues with current approaches: 1) difficulty in accurately detecting road landmarks, and 2) errors in reasoning about the road network topology. To address these, they developed new techniques called Topology-Inherited Training and the use of prior information from open-source maps. These improvements help the model perform better at road network extraction.
The researchers tested their approach on a dataset of road networks and found that it outperformed existing state-of-the-art methods in terms of both efficiency and accuracy.
Technical Explanation
The key innovation in this work is the development of a unified representation called the RoadNet Sequence that can model both the Euclidean (e.g., road landmark locations) and non-Euclidean (e.g., road topological connectivity) aspects of road networks.
The researchers then designed a non-autoregressive sequence-to-sequence model to understand the RoadNet Sequence. This approach leverages non-autoregressive dependencies while also addressing autoregressive dependencies, leading to improvements in both efficiency and accuracy.
To further enhance performance, the researchers identified two main bottlenecks in the current RoadNetTransformer model: poor landmark detection and error propagation to topology reasoning. To address these, they propose Topology-Inherited Training to better incorporate topology knowledge, and the use of prior information from open-source maps to improve landmark detection and reachability.
Extensive experiments on the nuScenes dataset demonstrate the superiority of the RoadNet Sequence representation and the non-autoregressive approach compared to existing state-of-the-art alternatives.
Critical Analysis
The researchers have made a significant contribution by addressing the challenge of effectively representing and modeling the combination of Euclidean and non-Euclidean data inherent in road network extraction. The use of the RoadNet Sequence and the non-autoregressive sequence-to-sequence model are promising approaches that show clear improvements over existing methods.
However, the paper does not provide a detailed analysis of the limitations of the proposed techniques. For example, it would be helpful to understand the specific scenarios or conditions where the model may struggle, such as in the presence of complex or irregular road networks. Additionally, the researchers could explore the generalizability of their approach to other types of spatial data beyond road networks.
Further research could also investigate the impact of different types of prior information from open-source maps and how to best incorporate this data to enhance the model's performance. Exploring alternative approaches to topology reasoning and landmark detection could also lead to additional improvements.
Conclusion
This research presents a novel way to represent and model road network data, which is essential for the generation of high-definition maps. By unifying the Euclidean and non-Euclidean aspects of the data into the RoadNet Sequence and using a non-autoregressive sequence-to-sequence approach, the researchers have demonstrated significant advancements in both efficiency and accuracy compared to existing methods.
The incorporation of Topology-Inherited Training and the use of prior information from open-source maps further strengthen the model's performance, particularly in addressing the key challenges of landmark detection and topology reasoning. These innovations have the potential to enable more accurate and reliable road network extraction, ultimately contributing to the development of better, more comprehensive maps.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📊
0
Translating Images to Road Network: A Sequence-to-Sequence Perspective
Jiachen Lu, Renyuan Peng, Xinyue Cai, Hang Xu, Feng Wen, Wei Zhang, Li Zhang
The extraction of road network is essential for the generation of high-definition maps since it enables the precise localization of road landmarks and their interconnections. However, generating road network poses a significant challenge due to the conflicting underlying combination of Euclidean (e.g., road landmarks location) and non-Euclidean (e.g., road topological connectivity) structures. Existing methods struggle to merge the two types of data domains effectively, but few of them address it properly. Instead, our work establishes a unified representation of both types of data domain by projecting both Euclidean and non-Euclidean data into an integer series called RoadNet Sequence. Further than modeling an auto-regressive sequence-to-sequence Transformer model to understand RoadNet Sequence, we decouple the dependency of RoadNet Sequence into a mixture of auto-regressive and non-autoregressive dependency. Building on this, our proposed non-autoregressive sequence-to-sequence approach leverages non-autoregressive dependencies while fixing the gap towards auto-regressive dependencies, resulting in success on both efficiency and accuracy. We further identify two main bottlenecks in the current RoadNetTransformer on a non-overfitting split of the dataset: poor landmark detection limited by the BEV Encoder and error propagation to topology reasoning. Therefore, we propose Topology-Inherited Training to inherit better topology knowledge into RoadNetTransformer. Additionally, we collect SD-Maps from open-source map datasets and use this prior information to significantly improve landmark detection and reachability. Extensive experiments on nuScenes dataset demonstrate the superiority of RoadNet Sequence representation and the non-autoregressive approach compared to existing state-of-the-art alternatives.
Read more9/4/2024
0
NLP-enabled trajectory map-matching in urban road networks using transformer sequence-to-sequence model
Sevin Mohammadi, Andrew W. Smyth
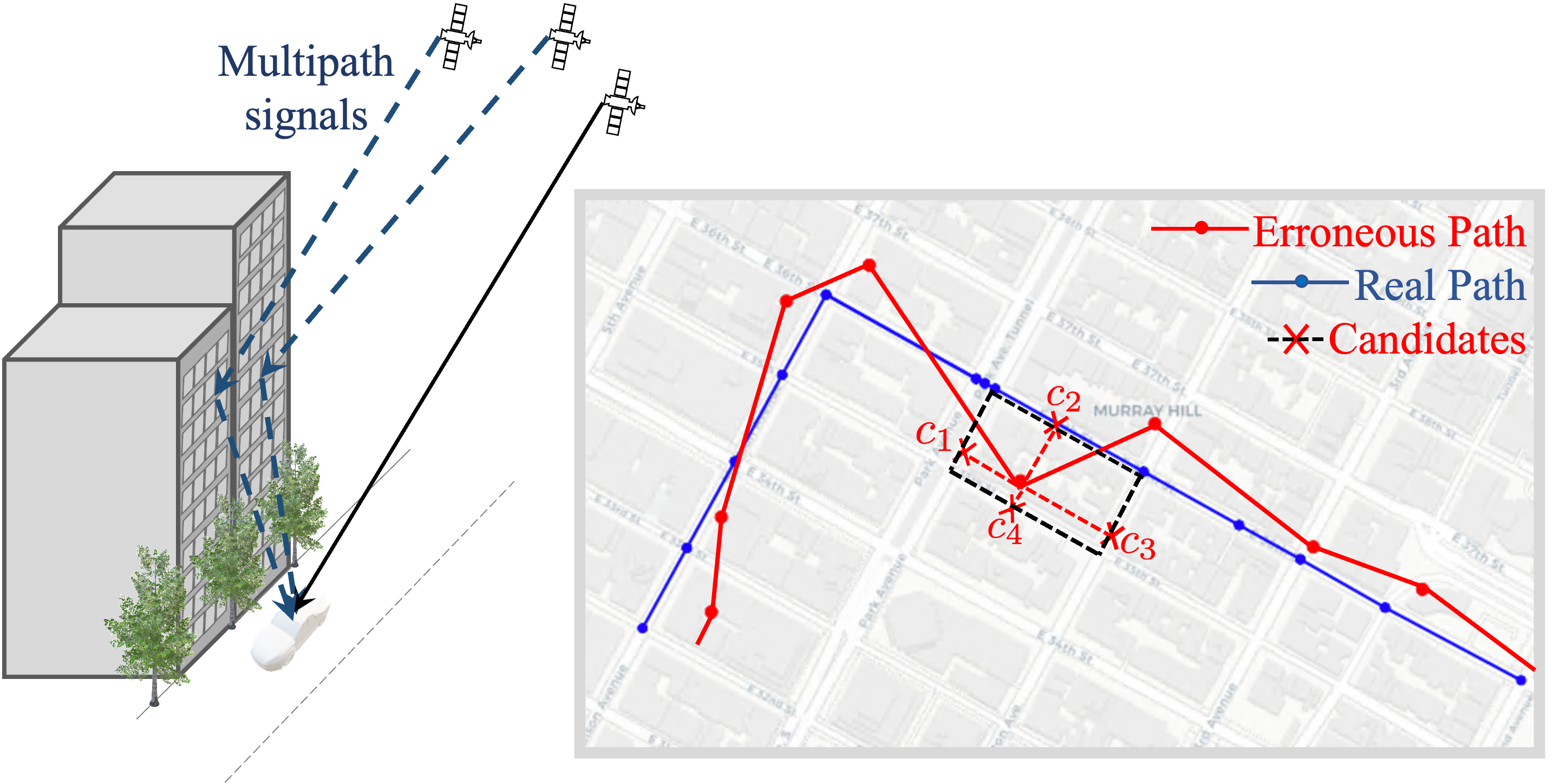
Large-scale geolocation telematics data acquired from connected vehicles has the potential to significantly enhance mobility infrastructures and operational systems within smart cities. To effectively utilize this data, it is essential to accurately match the geolocation data to the road segments. However, this matching is often not trivial due to the low sampling rate and errors exacerbated by multipath effects in urban environments. Traditionally, statistical modeling techniques such as Hidden-Markov models incorporating domain knowledge into the matching process have been extensively used for map-matching tasks. However, rule-based map-matching tasks are noise-sensitive and inefficient in processing large-scale trajectory data. Deep learning techniques directly learn the relationship between observed data and road networks from the data, often without the need for hand-crafted rules or domain knowledge. This renders them an efficient approach for map-matching large-scale datasets and makes them more robust to the noise. This paper introduces a sequence-to-sequence deep-learning model, specifically the transformer-based encoder-decoder model, to perform as a surrogate for map-matching algorithms. The encoder-decoder architecture initially encodes the series of noisy GPS points into a representation that automatically captures autoregressive behavior and spatial correlations between GPS points. Subsequently, the decoder associates data points with the road network features and thus transforms these representations into a sequence of road segments. The model is trained and evaluated using GPS traces collected in Manhattan, New York. Achieving an accuracy of 76%, transformer-based encoder-decoder models extensively employed in natural language processing presented a promising performance for translating noisy GPS data to the navigated routes in urban road networks.
Read more4/22/2024

0
Revisiting Non-Autoregressive Transformers for Efficient Image Synthesis
Zanlin Ni, Yulin Wang, Renping Zhou, Jiayi Guo, Jinyi Hu, Zhiyuan Liu, Shiji Song, Yuan Yao, Gao Huang
The field of image synthesis is currently flourishing due to the advancements in diffusion models. While diffusion models have been successful, their computational intensity has prompted the pursuit of more efficient alternatives. As a representative work, non-autoregressive Transformers (NATs) have been recognized for their rapid generation. However, a major drawback of these models is their inferior performance compared to diffusion models. In this paper, we aim to re-evaluate the full potential of NATs by revisiting the design of their training and inference strategies. Specifically, we identify the complexities in properly configuring these strategies and indicate the possible sub-optimality in existing heuristic-driven designs. Recognizing this, we propose to go beyond existing methods by directly solving the optimal strategies in an automatic framework. The resulting method, named AutoNAT, advances the performance boundaries of NATs notably, and is able to perform comparably with the latest diffusion models at a significantly reduced inference cost. The effectiveness of AutoNAT is validated on four benchmark datasets, i.e., ImageNet-256 & 512, MS-COCO, and CC3M. Our code is available at https://github.com/LeapLabTHU/ImprovedNAT.
Read more6/11/2024
🌐
0
Brightearth roads: Towards fully automatic road network extraction from satellite imagery
Liuyun Duan (LCT), Willard Mapurisa (LCT), Maxime Leras (LCT), Leigh Lotter (LCT), Yuliya Tarabalka (LCT)
The modern road network topology comprises intricately designed structures that introduce complexity when automatically reconstructing road networks. While open resources like OpenStreetMap (OSM) offer road networks with well-defined topology, they may not always be up to date worldwide. In this paper, we propose a fully automated pipeline for extracting road networks from very-high-resolution (VHR) satellite imagery. Our approach directly generates road line-strings that are seamlessly connected and precisely positioned. The process involves three key modules: a CNN-based neural network for road segmentation, a graph optimization algorithm to convert road predictions into vector line-strings, and a machine learning model for classifying road materials. Compared to OSM data, our results demonstrate significant potential for providing the latest road layouts and precise positions of road segments.
Read more6/24/2024