ForestTrav: Accurate, Efficient and Deployable Forest Traversability Estimation for Autonomous Ground Vehicles
2305.12705
0
0
🎯
Abstract
Autonomous navigation in unstructured vegetated environments remains an open challenge. To successfully operate in these settings, ground vehicles must assess the traversability of the environment and determine which vegetation is pliable enough to push through. In this work, we propose a novel method that combines a high-fidelity and feature-rich 3D voxel representation while leveraging the structural context and sparseness of SCNN's to assess Traversability Estimation (TE) in densely vegetated environments. The proposed method is thoroughly evaluated on an accurately-labeled real-world data set that we provide to the community. It is shown to outperform state-of-the-art methods by a significant margin (0.59 vs. 0.39 MCC score at 0.1m voxel resolution) in challenging scenes and to generalize to unseen environments. In addition, the method is economical in the amount of training data and training time required: a model is trained in minutes on a desktop computer. We show that by exploiting the context of the environment, our method can use different feature combinations with only limited performance variations. For example, our approach can be used with lidar-only features, whilst still assessing complex vegetated environments accurately, which was not demonstrated previously in the literature in such environments. In addition, we propose an approach to assess a traversability estimator's sensitivity to information quality and show our method's sensitivity is low.
Create account to get full access
Overview
- This paper proposes a novel method for assessing the traversability of densely vegetated environments for autonomous ground vehicles.
- The method uses a 3D voxel representation combined with a sparse convolutional neural network (SCNN) to estimate the traversability of the environment, taking into account the structural context and sparseness of the vegetation.
- The method is thoroughly evaluated on a real-world dataset and is shown to outperform state-of-the-art approaches, while requiring limited training data and time.
Plain English Explanation
Navigating through dense vegetation is a major challenge for autonomous ground vehicles. These vehicles need to be able to assess which areas of the environment are traversable - that is, which vegetation is pliable enough to push through without getting stuck. The paper proposes a new way to do this by creating a detailed 3D model of the environment and using a specialized neural network to analyze it.
The key innovation is the way the 3D model is represented and processed. Instead of a dense, continuous 3D model, the system uses a sparse 3D voxel representation. This captures the structure of the vegetation more efficiently. The neural network is also designed to take advantage of this sparse, contextual information, rather than just processing the 3D data in isolation.
This approach is shown to be much more effective at identifying traversable areas compared to previous methods, especially in complex, heavily vegetated environments. Importantly, it can achieve this high performance with relatively little training data and time - a model can be trained in just minutes on a standard desktop computer.
The authors also demonstrate that their method is flexible, and can work well using just 3D data from LiDAR sensors, without needing additional sensor inputs. This is an important practical advantage for real-world autonomous vehicles.
Overall, this research represents a significant advance in the ability of autonomous systems to navigate through challenging natural environments, with potential applications in forestry operations, agricultural robotics, and GPS-denied navigation.
Technical Explanation
The paper proposes a novel approach for Traversability Estimation (TE) in densely vegetated environments. The key elements are:
3D Voxel Representation: The system uses a high-fidelity 3D voxel grid to model the environment, capturing both the structure and sparseness of the vegetation. This representation allows the system to exploit the contextual information in the environment.
Sparse Convolutional Neural Network (SCNN): The authors leverage the structural context and sparseness of the 3D voxel representation by using a specialized SCNN architecture. This enables efficient processing of the 3D data, in contrast to dense, continuous 3D models.
Evaluation on Real-World Dataset: The proposed method is thoroughly evaluated on a comprehensive, accurately-labeled real-world dataset provided by the authors. The results show a significant improvement over state-of-the-art approaches, with a 0.59 MCC score at 0.1m voxel resolution, compared to 0.39 for previous methods.
Data Efficiency: The authors demonstrate that their approach is data-efficient, requiring only limited training data and time to achieve high performance. A model can be trained in minutes on a desktop computer.
Flexibility: The method can work effectively using just 3D LiDAR data, without needing additional sensor inputs. This makes it practical for real-world autonomous vehicle applications.
Sensitivity Analysis: The authors propose a method to assess the sensitivity of the traversability estimator to information quality, and show that their approach has low sensitivity.
Critical Analysis
The paper presents a thorough and well-designed study, with a number of strengths:
- The use of a sparse 3D voxel representation and SCNN architecture is a novel and promising approach that effectively captures the structural context of densely vegetated environments.
- The extensive evaluation on a real-world dataset, with comparisons to state-of-the-art methods, provides robust validation of the approach.
- The data efficiency of the method, requiring limited training data and time, is an important practical advantage.
- The flexibility to work with just LiDAR data is another key benefit for real-world deployment.
However, some potential limitations and areas for further research are:
- The dataset, while comprehensive, is still limited to a specific geographic region. Testing the generalization of the method to a wider range of environments would be valuable.
- The sensitivity analysis focuses on information quality, but other factors like sensor failures or occlusions could also impact the traversability estimates in real-world conditions.
- Integrating the traversability estimates with path planning and control algorithms, as explored in related work, could further demonstrate the practical utility of the approach.
Overall, this paper represents a significant contribution to the challenge of autonomous navigation in densely vegetated environments, with promising results and a solid technical foundation for future research and development.
Conclusion
This paper presents a novel method for assessing the traversability of densely vegetated environments for autonomous ground vehicles. By combining a high-fidelity 3D voxel representation with a specialized sparse convolutional neural network, the system can effectively capture the structural context and sparseness of the vegetation to estimate traversability.
The thorough evaluation on a real-world dataset demonstrates the method's superior performance compared to state-of-the-art approaches, while requiring limited training data and time. The flexibility to work with just 3D LiDAR data is also an important practical advantage.
This research represents an important step forward in the ability of autonomous systems to navigate challenging natural environments, with potential applications in forestry, agriculture, and GPS-denied navigation. Continued development and integration with other autonomous vehicle technologies could further enhance the capabilities of these systems in the real world.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📉
Wild Visual Navigation: Fast Traversability Learning via Pre-Trained Models and Online Self-Supervision
Mat'ias Mattamala, Jonas Frey, Piotr Libera, Nived Chebrolu, Georg Martius, Cesar Cadena, Marco Hutter, Maurice Fallon
0
0
Natural environments such as forests and grasslands are challenging for robotic navigation because of the false perception of rigid obstacles from high grass, twigs, or bushes. In this work, we present Wild Visual Navigation (WVN), an online self-supervised learning system for visual traversability estimation. The system is able to continuously adapt from a short human demonstration in the field, only using onboard sensing and computing. One of the key ideas to achieve this is the use of high-dimensional features from pre-trained self-supervised models, which implicitly encode semantic information that massively simplifies the learning task. Further, the development of an online scheme for supervision generator enables concurrent training and inference of the learned model in the wild. We demonstrate our approach through diverse real-world deployments in forests, parks, and grasslands. Our system is able to bootstrap the traversable terrain segmentation in less than 5 min of in-field training time, enabling the robot to navigate in complex, previously unseen outdoor terrains. Code: https://bit.ly/498b0CV - Project page:https://bit.ly/3M6nMHH
4/11/2024

Learning-based Traversability Costmap for Autonomous Off-road Navigation
Qiumin Zhu, Zhen Sun, Songpengcheng Xia, Guoqing Liu, Kehui Ma, Ling Pei, Zheng Gong
0
0
Traversability estimation in off-road terrains is an essential procedure for autonomous navigation. However, creating reliable labels for complex interactions between the robot and the surface is still a challenging problem in learning-based costmap generation. To address this, we propose a method that predicts traversability costmaps by leveraging both visual and geometric information of the environment. To quantify the surface properties like roughness and bumpiness, we introduce a novel way of risk-aware labelling with proprioceptive information for network training. We validate our method in costmap prediction and navigation tasks for complex off-road scenarios. Our results demonstrate that our costmap prediction method excels in terms of average accuracy and MSE. The navigation results indicate that using our learned costmaps leads to safer and smoother driving, outperforming previous methods in terms of the highest success rate, lowest normalized trajectory length, lowest time cost, and highest mean stability across two scenarios.
6/13/2024
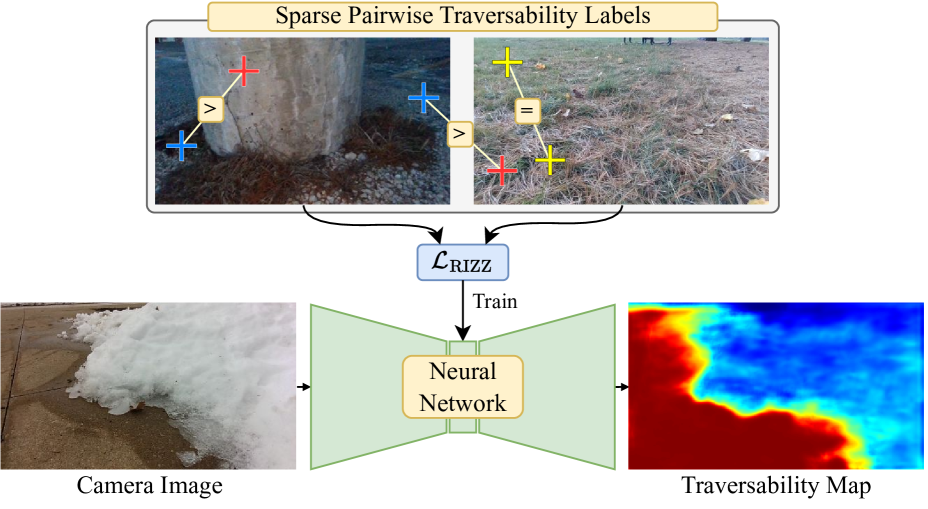
W-RIZZ: A Weakly-Supervised Framework for Relative Traversability Estimation in Mobile Robotics
Andre Schreiber, Arun N. Sivakumar, Peter Du, Mateus V. Gasparino, Girish Chowdhary, Katherine Driggs-Campbell
0
0
Successful deployment of mobile robots in unstructured domains requires an understanding of the environment and terrain to avoid hazardous areas, getting stuck, and colliding with obstacles. Traversability estimation--which predicts where in the environment a robot can travel--is one prominent approach that tackles this problem. Existing geometric methods may ignore important semantic considerations, while semantic segmentation approaches involve a tedious labeling process. Recent self-supervised methods reduce labeling tedium, but require additional data or models and tend to struggle to explicitly label untraversable areas. To address these limitations, we introduce a weakly-supervised method for relative traversability estimation. Our method involves manually annotating the relative traversability of a small number of point pairs, which significantly reduces labeling effort compared to traditional segmentation-based methods and avoids the limitations of self-supervised methods. We further improve the performance of our method through a novel cross-image labeling strategy and loss function. We demonstrate the viability and performance of our method through deployment on a mobile robot in outdoor environments.
6/6/2024

Learning Semantic Traversability with Egocentric Video and Automated Annotation Strategy
Yunho Kim, Jeong Hyun Lee, Choongin Lee, Juhyeok Mun, Donghoon Youm, Jeongsoo Park, Jemin Hwangbo
0
0
For reliable autonomous robot navigation in urban settings, the robot must have the ability to identify semantically traversable terrains in the image based on the semantic understanding of the scene. This reasoning ability is based on semantic traversability, which is frequently achieved using semantic segmentation models fine-tuned on the testing domain. This fine-tuning process often involves manual data collection with the target robot and annotation by human labelers which is prohibitively expensive and unscalable. In this work, we present an effective methodology for training a semantic traversability estimator using egocentric videos and an automated annotation process. Egocentric videos are collected from a camera mounted on a pedestrian's chest. The dataset for training the semantic traversability estimator is then automatically generated by extracting semantically traversable regions in each video frame using a recent foundation model in image segmentation and its prompting technique. Extensive experiments with videos taken across several countries and cities, covering diverse urban scenarios, demonstrate the high scalability and generalizability of the proposed annotation method. Furthermore, performance analysis and real-world deployment for autonomous robot navigation showcase that the trained semantic traversability estimator is highly accurate, able to handle diverse camera viewpoints, computationally light, and real-world applicable. The summary video is available at https://youtu.be/EUVoH-wA-lA.
6/6/2024