UMI on Legs: Making Manipulation Policies Mobile with Manipulation-Centric Whole-body Controllers

0

Sign in to get full access
Overview
- This paper presents UMIonLegs, a universal manipulation interface for legged robots that can be used in both simulated and real-world environments.
- The key idea is to enable legged robots to perform a wide range of manipulation tasks using a single, versatile interface.
- The system is evaluated on several legged robots, including the Visual Whole-Body Control for Legged Locomotion and Manipulation and RoboDuet platforms.
Plain English Explanation
The researchers developed a universal control interface that allows legged robots to perform a variety of manipulation tasks, like picking up and moving objects. This interface can be used both in simulation and in the real world, which is useful for testing and training the robots before deploying them in the real environment.
The key advantage of this system is that it provides a single, consistent way for the robots to interact with their environment, rather than having to learn separate control schemes for different tasks. This makes the robots more versatile and easier to program.
The researchers tested their system on several different legged robot platforms, including some that were designed for whole-body control (combining locomotion and manipulation) and others focused on mobile manipulation. This shows the flexibility and broad applicability of the UMIonLegs interface.
Technical Explanation
The UMIonLegs system consists of a control interface that allows legged robots to perform a wide range of manipulation tasks, including Empowering Embodied Manipulation with Bimanual Mobile Robot Manipulation, Learning Force Control for Legged Manipulation, and I-CTRL: Imitation to Control Humanoid Robots. The interface is designed to work across different legged robot platforms and environments, both simulated and real.
The key components of the system include:
- A unified control scheme that maps high-level task commands to low-level joint torques and velocities
- Algorithms for planning and executing manipulation trajectories that take into account the unique capabilities and constraints of legged robots
- Techniques for seamlessly transitioning between locomotion and manipulation behaviors
The researchers evaluate the UMIonLegs system on a variety of legged robots, including quadrupeds and bipeds, in both simulation and real-world settings. They demonstrate the system's ability to perform diverse manipulation tasks, such as object grasping, lifting, and transport, while maintaining stable locomotion.
Critical Analysis
The paper provides a comprehensive evaluation of the UMIonLegs system and highlights its versatility across different legged robot platforms and environments. However, the authors acknowledge some limitations, such as the need for careful calibration of the robots' sensors and actuators to ensure accurate manipulation performance.
Additionally, the paper does not address the potential challenges of deploying the system in unstructured, real-world environments, where the robots may encounter unexpected obstacles or disturbances. Further research may be needed to improve the system's robustness and adaptability to such scenarios.
Another area for future work could be the integration of more advanced perception and planning algorithms to enhance the robots' manipulation capabilities, such as the ability to reason about the physical properties of objects or to plan multi-step manipulation sequences.
Conclusion
The UMIonLegs system presents a promising approach for enabling legged robots to perform a wide range of manipulation tasks in both simulated and real-world environments. By providing a unified control interface, the system can help streamline the development and deployment of versatile legged robot platforms that can seamlessly transition between locomotion and manipulation behaviors. This work contributes to the broader goal of creating more capable and adaptable robotic systems that can assist humans in a variety of real-world applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
UMI on Legs: Making Manipulation Policies Mobile with Manipulation-Centric Whole-body Controllers
Huy Ha, Yihuai Gao, Zipeng Fu, Jie Tan, Shuran Song
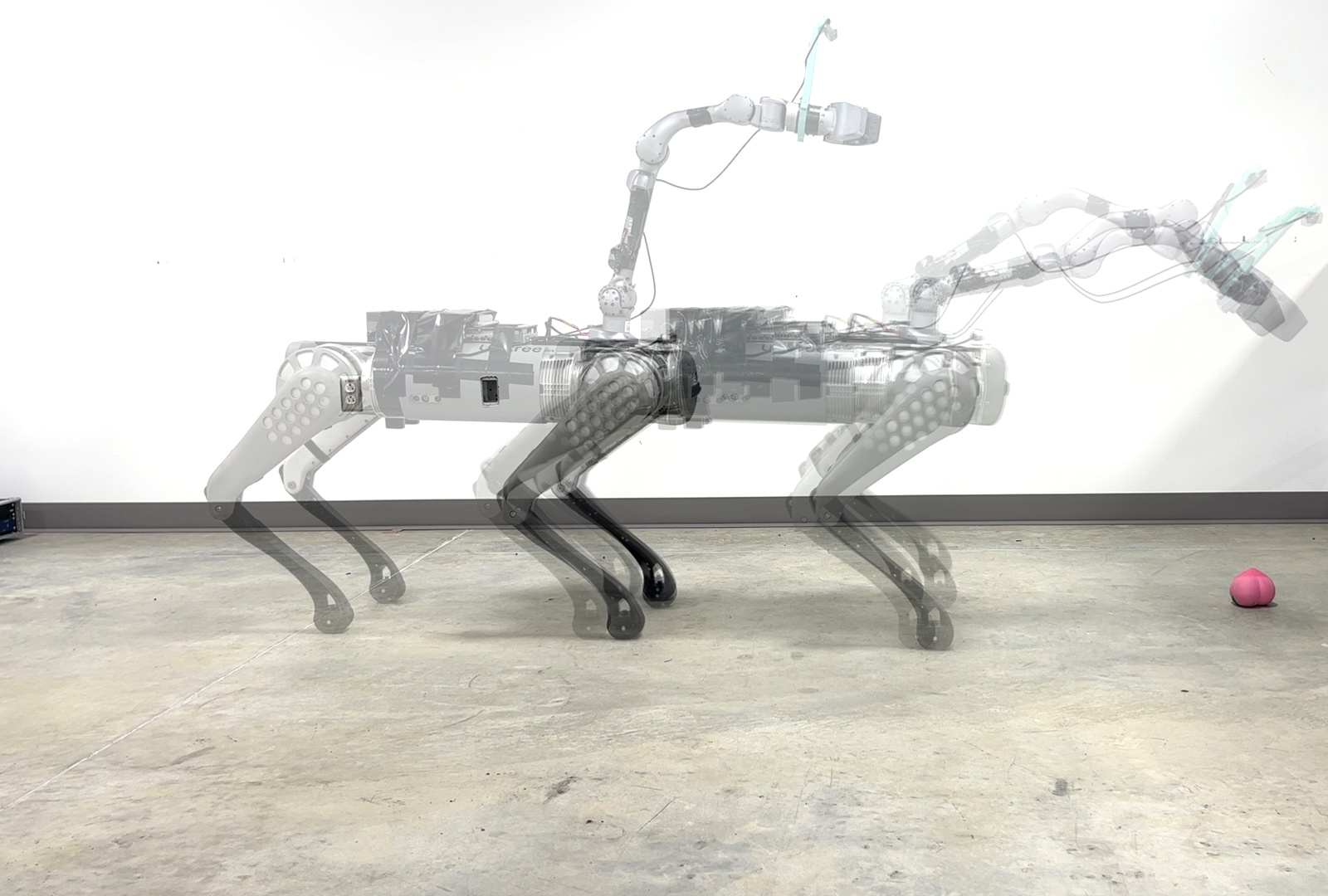
We introduce UMI-on-Legs, a new framework that combines real-world and simulation data for quadruped manipulation systems. We scale task-centric data collection in the real world using a hand-held gripper (UMI), providing a cheap way to demonstrate task-relevant manipulation skills without a robot. Simultaneously, we scale robot-centric data in simulation by training whole-body controller for task-tracking without task simulation setups. The interface between these two policies is end-effector trajectories in the task frame, inferred by the manipulation policy and passed to the whole-body controller for tracking. We evaluate UMI-on-Legs on prehensile, non-prehensile, and dynamic manipulation tasks, and report over 70% success rate on all tasks. Lastly, we demonstrate the zero-shot cross-embodiment deployment of a pre-trained manipulation policy checkpoint from prior work, originally intended for a fixed-base robot arm, on our quadruped system. We believe this framework provides a scalable path towards learning expressive manipulation skills on dynamic robot embodiments. Please checkout our website for robot videos, code, and data: https://umi-on-legs.github.io
Read more7/16/2024

0
One Policy to Run Them All: an End-to-end Learning Approach to Multi-Embodiment Locomotion
Nico Bohlinger, Grzegorz Czechmanowski, Maciej Krupka, Piotr Kicki, Krzysztof Walas, Jan Peters, Davide Tateo
Deep Reinforcement Learning techniques are achieving state-of-the-art results in robust legged locomotion. While there exists a wide variety of legged platforms such as quadruped, humanoids, and hexapods, the field is still missing a single learning framework that can control all these different embodiments easily and effectively and possibly transfer, zero or few-shot, to unseen robot embodiments. We introduce URMA, the Unified Robot Morphology Architecture, to close this gap. Our framework brings the end-to-end Multi-Task Reinforcement Learning approach to the realm of legged robots, enabling the learned policy to control any type of robot morphology. The key idea of our method is to allow the network to learn an abstract locomotion controller that can be seamlessly shared between embodiments thanks to our morphology-agnostic encoders and decoders. This flexible architecture can be seen as a potential first step in building a foundation model for legged robot locomotion. Our experiments show that URMA can learn a locomotion policy on multiple embodiments that can be easily transferred to unseen robot platforms in simulation and the real world.
Read more9/11/2024
0
Visual Whole-Body Control for Legged Loco-Manipulation
Minghuan Liu, Zixuan Chen, Xuxin Cheng, Yandong Ji, Ri-Zhao Qiu, Ruihan Yang, Xiaolong Wang
We study the problem of mobile manipulation using legged robots equipped with an arm, namely legged loco-manipulation. The robot legs, while usually utilized for mobility, offer an opportunity to amplify the manipulation capabilities by conducting whole-body control. That is, the robot can control the legs and the arm at the same time to extend its workspace. We propose a framework that can conduct the whole-body control autonomously with visual observations. Our approach, namely Visual Whole-Body Control(VBC), is composed of a low-level policy using all degrees of freedom to track the body velocities along with the end-effector position, and a high-level policy proposing the velocities and end-effector position based on visual inputs. We train both levels of policies in simulation and perform Sim2Real transfer for real robot deployment. We perform extensive experiments and show significant improvements over baselines in picking up diverse objects in different configurations (heights, locations, orientations) and environments.
Read more5/15/2024

0
New!Real-Time Whole-Body Control of Legged Robots with Model-Predictive Path Integral Control
Juan Alvarez-Padilla, John Z. Zhang, Sofia Kwok, John M. Dolan, Zachary Manchester
This paper presents a system for enabling real-time synthesis of whole-body locomotion and manipulation policies for real-world legged robots. Motivated by recent advancements in robot simulation, we leverage the efficient parallelization capabilities of the MuJoCo simulator to achieve fast sampling over the robot state and action trajectories. Our results show surprisingly effective real-world locomotion and manipulation capabilities with a very simple control strategy. We demonstrate our approach on several hardware and simulation experiments: robust locomotion over flat and uneven terrains, climbing over a box whose height is comparable to the robot, and pushing a box to a goal position. To our knowledge, this is the first successful deployment of whole-body sampling-based MPC on real-world legged robot hardware. Experiment videos and code can be found at: https://whole-body-mppi.github.io/
Read more9/17/2024