Uncertainty-Aware Planning for Heterogeneous Robot Teams using Dynamic Topological Graphs and Mixed-Integer Programming

0
🏷️
Sign in to get full access
Overview
- Addresses the challenge of planning and coordinating multiple robots in uncertain environments
- Proposes a computational approach using a topological graph representation to overcome the exponential growth of the belief space
- Formulates a mixed-integer program to generate optimal multi-robot plans in real-time, even as the environment changes
Plain English Explanation
When you have a team of robots working together in an uncertain environment, it can be really hard to plan their movements and coordinate their actions. This is because the number of possible situations the robots could encounter (the "belief space") grows exponentially as you add more robots. This paper presents a way to tackle this challenge.
The key idea is to represent the environment and the robots' operating scenario using a topological graph. In this graph, the "edges" (connections between points) have weight distributions that change based on the state of the robot team. Even though the belief space still grows exponentially, the researchers were able to create a mixed-integer program that can quickly generate optimal plans for the robot team. This allows the robots to adapt their movements in real-time as the environment changes, while also minimizing the risk of being detected by uncertain observers.
The researchers tested this approach in a scenario where a robot team needs to move through an environment without being spotted by observers in uncertain positions. They found that their method is fast enough for real-time replanning, and can improve the team's performance even when the robots don't have perfect information about the environment. The approach can also be adjusted to accommodate different risk profiles, making it flexible for different applications.
Technical Explanation
The paper addresses the challenge of multi-robot planning and coordination in uncertain environments, where the belief space (the set of possible states the robot team could be in) grows exponentially with the number of robots. To overcome this computational hurdle, the researchers represent the environment and operational scenario using a topological graph, where the edge weight distributions vary based on the state of the robot team.
While this belief space representation still scales exponentially, the researchers formulate a computationally efficient mixed-integer program that can generate optimal multi-robot plans in seconds. This allows for real-time replanning as the environment changes.
The researchers evaluate their approach in a scenario where a robot team must move through an environment while minimizing detection by observers in uncertain positions. They demonstrate that their method is sufficiently computationally tractable for real-time replanning, can improve performance in the presence of imperfect information, and can be adjusted to accommodate different risk profiles.
Critical Analysis
The paper presents a promising approach to the challenging problem of multi-robot planning and coordination in uncertain environments. By using a topological graph representation and a mixed-integer programming formulation, the researchers are able to generate optimal plans in a computationally efficient manner, even as the environment changes.
One potential limitation is that the belief space representation still scales exponentially with the number of robots, which could limit the scalability of the approach to very large teams. The researchers acknowledge this and suggest that future work could explore ways to further reduce the computational burden, such as leveraging hierarchical or decentralized planning strategies.
Additionally, the paper focuses on a specific scenario of robot teams navigating through an environment while avoiding detection by uncertain observers. While this is an important use case, it would be valuable to see how the approach might generalize to other multi-robot planning challenges, such as cooperative information gathering or task assignment in dynamic environments.
Overall, the paper presents a well-designed and evaluated approach that could have significant implications for the field of multi-robot planning and coordination, especially in the context of uncertain environments. Further research and real-world deployments will be crucial to fully understand the strengths, limitations, and potential applications of this method.
Conclusion
This paper tackles the fundamental challenge of planning and coordinating multiple robots in uncertain environments, where the belief space grows exponentially with the number of robots. By representing the environment and scenario using a topological graph and formulating a computationally efficient mixed-integer program, the researchers demonstrate a solution that can generate optimal multi-robot plans in real-time, even as the environment changes.
The key innovation is the use of this graph-based representation to overcome the exponential growth of the belief space, while still maintaining the flexibility to adapt to different risk profiles and environmental conditions. This approach could have important implications for a wide range of multi-robot applications, from search and rescue operations to autonomous transportation, where the ability to plan and coordinate in uncertain conditions is crucial.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🏷️
0
Uncertainty-Aware Planning for Heterogeneous Robot Teams using Dynamic Topological Graphs and Mixed-Integer Programming
Cora A. Dimmig, Kevin C. Wolfe, Marin Kobilarov, Joseph Moore
Multi-robot planning and coordination in uncertain environments is a fundamental computational challenge, since the belief space increases exponentially with the number of robots. In this paper, we address the problem of planning in uncertain environments with a heterogeneous robot team comprised of fast scout vehicles for information gathering and more risk-averse carrier robots from which the scout vehicles are deployed. To overcome the computational challenges associated with multi-robot motion planning in the presence of environmental uncertainty, we represent the environment and operational scenario using a topological graph, where the edge weight distributions vary with the state of the robot team on the graph. While this belief space representation still scales exponentially with the number of robots, we formulate a computationally efficient mixed-integer program which is capable of generating optimal multi-robot plans in seconds. We evaluate our approach in a representative scenario where the robot team must move through an environment while minimizing detection by observers in positions that are uncertain to the robot team. We demonstrate that our approach is sufficiently computationally tractable for real-time re-planning in changing environments, can improve performance in the presence of imperfect information, and can be adjusted to accommodate different risk profiles.
Read more7/16/2024
🧪
0
Scalable Multi-Robot Motion Planning Using Guidance-Informed Hypergraphs
Courtney McBeth, James Motes, Isaac Ngui, Marco Morales, Nancy M. Amato
In this work, we present a multi-robot planning framework that leverages guidance about the problem to efficiently search the planning space. This guidance captures when coordination between robots is necessary, allowing us to decompose the intractably large multi-robot search space while limiting risk of inter-robot conflicts by composing relevant robot groups together while planning. Our framework additionally supports planning with kinodynamic constraints through our conflict resolution structure. This structure also improves the scalability of our approach by eliminating unnecessary work during the construction of motion solutions. We also provide an application of this framework to multiple mobile robot motion planning in congested environments using topological guidance. Our previous work has explored using topological guidance, which utilizes information about the robots' environment, in these multi-robot settings where a high degree of coordination is required of the full robot group. In real-world scenarios, this high level of coordination is not always necessary and results in excessive computational overhead. Here, we leverage our novel framework to achieve a significant improvement in scalability and show that our method efficiently finds paths for robot teams up to an order of magnitude larger than existing state-of-the-art methods in congested settings with narrow passages in the environment.
Read more7/2/2024
0
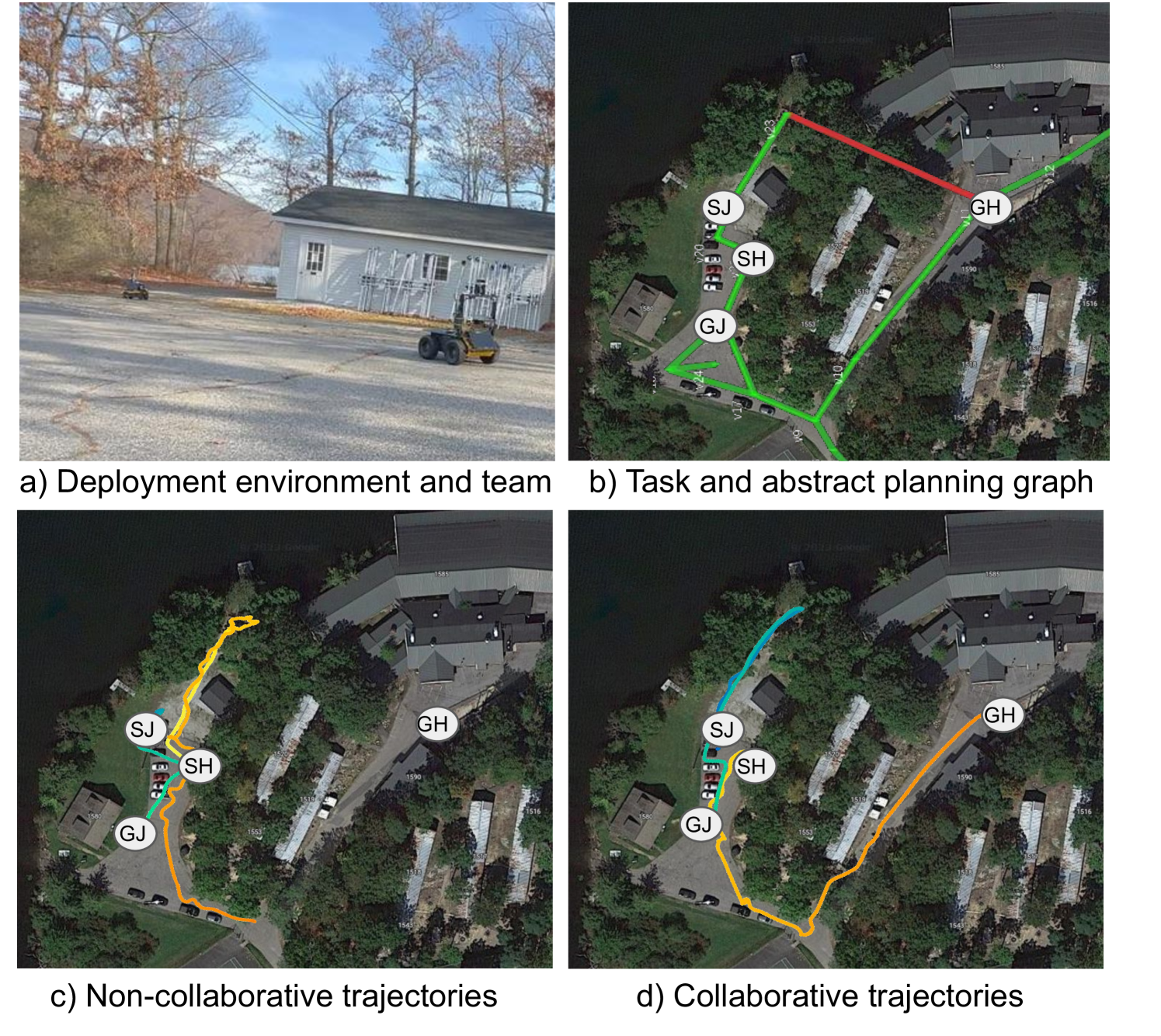
Real-World Deployment of a Hierarchical Uncertainty-Aware Collaborative Multiagent Planning System
Martina Stadler Kurtz, Samuel Prentice, Yasmin Veys, Long Quang, Carlos Nieto-Granda, Michael Novitzky, Ethan Stump, Nicholas Roy
We would like to enable a collaborative multiagent team to navigate at long length scales and under uncertainty in real-world environments. In practice, planning complexity scales with the number of agents in the team, with the length scale of the environment, and with environmental uncertainty. Enabling tractable planning requires developing abstract models that can represent complex, high-quality plans. However, such models often abstract away information needed to generate directly-executable plans for real-world agents in real-world environments, as planning in such detail, especially in the presence of real-world uncertainty, would be computationally intractable. In this paper, we describe the deployment of a planning system that used a hierarchy of planners to execute collaborative multiagent navigation tasks in real-world, unknown environments. By developing a planning system that was robust to failures at every level of the planning hierarchy, we enabled the team to complete collaborative navigation tasks, even in the presence of imperfect planning abstractions and real-world uncertainty. We deployed our approach on a Clearpath Husky-Jackal team navigating in a structured outdoor environment, and demonstrated that the system enabled the agents to successfully execute collaborative plans.
Read more4/29/2024

0
Multi-Robot Coordination Induced in Hazardous Environments through an Adversarial Graph-Traversal Game
James Berneburg, Xuan Wang, Xuesu Xiao, Daigo Shishika
This paper presents a game theoretic formulation of a graph traversal problem, with applications to robots moving through hazardous environments in the presence of an adversary, as in military and security applications. The blue team of robots moves in an environment modeled by a time-varying graph, attempting to reach some goal with minimum cost, while the red team controls how the graph changes to maximize the cost. The problem is formulated as a stochastic game, so that Nash equilibrium strategies can be computed numerically. Bounds are provided for the game value, with a guarantee that it solves the original problem. Numerical simulations demonstrate the results and the effectiveness of this method, particularly showing the benefit of mixing actions for both players, as well as beneficial coordinated behavior, where blue robots split up and/or synchronize to traverse risky edges.
Read more9/14/2024