Uncertainty quantification for iterative algorithms in linear models with application to early stopping

0
📉
Sign in to get full access
Overview
- This paper investigates the behavior of iterative algorithms used in high-dimensional linear regression problems, where the feature dimension (p) is comparable to the sample size (n).
- The analysis applies to common algorithms like Gradient Descent (GD), Proximal GD, and their accelerated variants such as Fast Iterative Soft-Thresholding (FISTA).
- The paper proposes novel estimators for the generalization error of the iterates (the intermediate results) at any fixed iteration along the algorithm's trajectory.
- These estimators are shown to be √n-consistent under Gaussian designs, meaning they converge to the true value at a fast rate as the sample size increases.
- The paper also demonstrates how these estimates can be used for early stopping - selecting the iteration with the lowest generalization error.
- Additionally, the paper provides a technique for developing debiased estimates and valid confidence intervals for the components of the true coefficient vector.
Plain English Explanation
When you're trying to build a machine learning model to make predictions, one common approach is to use linear regression. This involves finding a set of weights or coefficients that best fit a linear relationship between the input features and the target variable.
In high-dimensional problems, where the number of features (p) is comparable to or even larger than the number of samples (n), training these linear regression models can be challenging. Iterative algorithms like Gradient Descent and Proximal Gradient Descent are often used to find the optimal coefficients.
This paper proposes new ways to estimate the generalization error of the intermediate results (iterates) produced by these iterative algorithms. Generalization error is a measure of how well the model will perform on new, unseen data. By having good estimates of the generalization error at each iteration, the researchers show that you can choose the best iteration to stop at - a technique called "early stopping". This can help you avoid overfitting and improve the model's performance on new data.
The paper also provides a method for correcting biases in the final coefficient estimates and constructing valid confidence intervals around them. This is important for understanding the uncertainty in the model's predictions and making reliable inferences.
Technical Explanation
The paper studies the behavior of the iterates hbb^1, ..., hbb^T obtained from iterative algorithms in high-dimensional linear regression, where the feature dimension p is comparable to the sample size n (i.e., p ≈ n). The analysis covers common algorithms like Gradient Descent (GD), Proximal GD, and their accelerated variants such as Fast Iterative Soft-Thresholding (FISTA).
The key contributions of the paper are:
-
Novel generalization error estimators: The authors propose new estimators for the generalization error of the iterates hbb^t at any fixed iteration t along the algorithm's trajectory. These estimators are proved to be √n-consistent under Gaussian designs, meaning they converge to the true value at a fast rate as the sample size increases.
-
Early stopping: When the generalization error of the iterates follows a U-shape function of the iteration t, the proposed estimates can be used to select the iteration hat t that achieves the smallest generalization error along the trajectory - a technique known as early stopping.
-
Debiasing and confidence intervals: The paper provides a technique for developing debiased estimates and valid confidence intervals for the components of the true coefficient vector from the iterate hbb^t at any finite iteration t.
The paper presents extensive simulations on synthetic data to illustrate the theoretical results.
Critical Analysis
The paper makes several important contributions to the understanding of iterative algorithms in high-dimensional linear regression. The proposed generalization error estimators and their application to early stopping are particularly noteworthy, as they can help practitioners avoid overfitting and improve the performance of their models on new data.
One potential limitation of the research is that it assumes a Gaussian design matrix, which may not always hold in real-world applications. It would be valuable to see how the proposed methods perform under more realistic data distributions or in the presence of outliers or other modeling challenges.
Additionally, the paper does not explore the implications of these techniques for downstream tasks, such as causal inference or interpretability. Investigating how the debiased estimates and confidence intervals can be used to draw reliable inferences about the underlying model parameters could be an interesting avenue for future research.
Overall, this paper makes a significant contribution to the understanding of iterative algorithms in high-dimensional regression and provides practical tools for improving the performance and reliability of these models. Researchers and practitioners in the field of machine learning and statistical modeling may find the insights and techniques presented in this work highly valuable.
Conclusion
This paper introduces novel methods for analyzing the behavior of iterative algorithms in high-dimensional linear regression problems, where the feature dimension is comparable to the sample size. The proposed generalization error estimators, early stopping techniques, and debiasing corrections can help practitioners train more reliable and interpretable models, with potential applications in a wide range of domains.
By providing a deeper understanding of the convergence properties and generalization capabilities of these iterative algorithms, this research advances the state of the art in high-dimensional statistical learning and opens up new directions for further exploration and development.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📉
0
Uncertainty quantification for iterative algorithms in linear models with application to early stopping
Pierre C. Bellec, Kai Tan
This paper investigates the iterates $hbb^1,dots,hbb^T$ obtained from iterative algorithms in high-dimensional linear regression problems, in the regime where the feature dimension $p$ is comparable with the sample size $n$, i.e., $p asymp n$. The analysis and proposed estimators are applicable to Gradient Descent (GD), proximal GD and their accelerated variants such as Fast Iterative Soft-Thresholding (FISTA). The paper proposes novel estimators for the generalization error of the iterate $hbb^t$ for any fixed iteration $t$ along the trajectory. These estimators are proved to be $sqrt n$-consistent under Gaussian designs. Applications to early-stopping are provided: when the generalization error of the iterates is a U-shape function of the iteration $t$, the estimates allow to select from the data an iteration $hat t$ that achieves the smallest generalization error along the trajectory. Additionally, we provide a technique for developing debiasing corrections and valid confidence intervals for the components of the true coefficient vector from the iterate $hbb^t$ at any finite iteration $t$. Extensive simulations on synthetic data illustrate the theoretical results.
Read more4/30/2024
0
On Regularization via Early Stopping for Least Squares Regression
Rishi Sonthalia, Jackie Lok, Elizaveta Rebrova
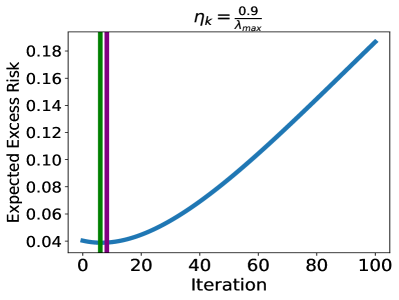
A fundamental problem in machine learning is understanding the effect of early stopping on the parameters obtained and the generalization capabilities of the model. Even for linear models, the effect is not fully understood for arbitrary learning rates and data. In this paper, we analyze the dynamics of discrete full batch gradient descent for linear regression. With minimal assumptions, we characterize the trajectory of the parameters and the expected excess risk. Using this characterization, we show that when training with a learning rate schedule $eta_k$, and a finite time horizon $T$, the early stopped solution $beta_T$ is equivalent to the minimum norm solution for a generalized ridge regularized problem. We also prove that early stopping is beneficial for generic data with arbitrary spectrum and for a wide variety of learning rate schedules. We provide an estimate for the optimal stopping time and empirically demonstrate the accuracy of our estimate.
Read more6/10/2024
↗️
0
Unbiased least squares regression via averaged stochastic gradient descent
Nabil Kahal'e
We consider an on-line least squares regression problem with optimal solution $theta^*$ and Hessian matrix H, and study a time-average stochastic gradient descent estimator of $theta^*$. For $kge2$, we provide an unbiased estimator of $theta^*$ that is a modification of the time-average estimator, runs with an expected number of time-steps of order k, with O(1/k) expected excess risk. The constant behind the O notation depends on parameters of the regression and is a poly-logarithmic function of the smallest eigenvalue of H. We provide both a biased and unbiased estimator of the expected excess risk of the time-average estimator and of its unbiased counterpart, without requiring knowledge of either H or $theta^*$. We describe an average-start version of our estimators with similar properties. Our approach is based on randomized multilevel Monte Carlo. Our numerical experiments confirm our theoretical findings.
Read more6/28/2024
📈
0
Iterative thresholding for non-linear learning in the strong $varepsilon$-contamination model
Arvind Rathnashyam, Alex Gittens
We derive approximation bounds for learning single neuron models using thresholded gradient descent when both the labels and the covariates are possibly corrupted adversarially. We assume the data follows the model $y = sigma(mathbf{w}^{*} cdot mathbf{x}) + xi,$ where $sigma$ is a nonlinear activation function, the noise $xi$ is Gaussian, and the covariate vector $mathbf{x}$ is sampled from a sub-Gaussian distribution. We study sigmoidal, leaky-ReLU, and ReLU activation functions and derive a $O(nusqrt{epsilonlog(1/epsilon)})$ approximation bound in $ell_{2}$-norm, with sample complexity $O(d/epsilon)$ and failure probability $e^{-Omega(d)}$. We also study the linear regression problem, where $sigma(mathbf{x}) = mathbf{x}$. We derive a $O(nuepsilonlog(1/epsilon))$ approximation bound, improving upon the previous $O(nu)$ approximation bounds for the gradient-descent based iterative thresholding algorithms of Bhatia et al. (NeurIPS 2015) and Shen and Sanghavi (ICML 2019). Our algorithm has a $O(textrm{polylog}(N,d)log(R/epsilon))$ runtime complexity when $|mathbf{w}^{*}|_2 leq R$, improving upon the $O(text{polylog}(N,d)/epsilon^2)$ runtime complexity of Awasthi et al. (NeurIPS 2022).
Read more9/6/2024