UAV Navigation in Tunnels with 2D tilted LiDARs
2404.09688
0
0
Abstract
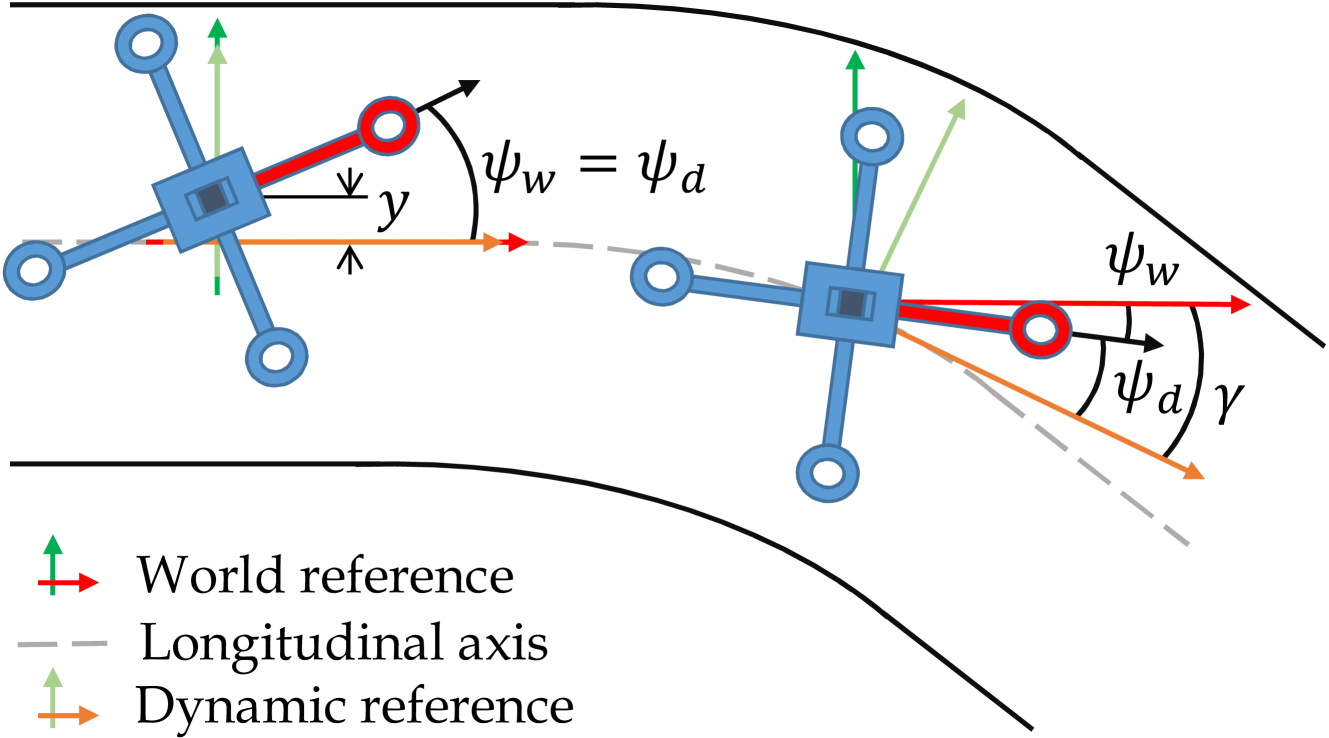
Navigation of UAVs in challenging environments like tunnels or mines, where it is not possible to use GNSS methods to self-localize, illumination may be uneven or nonexistent, and wall features are likely to be scarce, is a complex task, especially if the navigation has to be done at high speed. In this paper we propose a novel proof-of-concept navigation technique for UAVs based on the use of LiDAR information through the joint use of geometric and machine-learning algorithms. The perceived information is processed by a deep neural network to establish the yaw of the UAV with respect to the tunnel's longitudinal axis, in order to adjust the direction of navigation. Additionally, a geometric method is used to compute the safest location inside the tunnel (i.e. the one that maximizes the distance to the closest obstacle). This information proves to be sufficient for simple yet effective navigation in straight and curved tunnels.
Create account to get full access
Overview
- This paper presents a method for navigating unmanned aerial vehicles (UAVs) through tunnels using 2D tilted LiDAR sensors.
- The proposed approach addresses the challenges of navigating in confined spaces with limited visibility and complex environments.
- The researchers introduce a novel navigation algorithm that leverages the unique perspective provided by tilted LiDAR sensors to estimate the UAV's position and orientation within the tunnel.
Plain English Explanation
In this paper, the researchers describe a way to help drones (also known as unmanned aerial vehicles or UAVs) navigate through tunnels. Tunnels can be tricky for drones to fly through because the space is tight and it's hard for the drone to see where it's going.
The researchers came up with a new algorithm that uses a special type of laser sensor called a LiDAR. Instead of pointing the LiDAR straight ahead, they tilt it slightly. This gives the drone a unique view of the tunnel walls and floor, which helps it figure out where it is and which way it needs to go.
The algorithm takes the information from the tilted LiDAR and uses it to estimate the drone's position and orientation (which way it's facing) inside the tunnel. This allows the drone to fly safely through the tunnel without crashing into the walls or getting lost.
The researchers tested their approach in computer simulations and found that it works well for helping drones navigate tight, confined spaces like tunnels. This could be really useful for missions where drones need to explore or inspect the inside of tunnels, like for infrastructure maintenance or search and rescue operations.
Technical Explanation
The paper introduces a novel navigation approach for UAVs operating in tunnel environments using 2D tilted LiDAR sensors. Conventional navigation methods that rely on downward-facing sensors can struggle in tunnels due to the limited visibility and complex, confined geometry.
The proposed approach leverages the unique perspective provided by tilting the LiDAR sensor. By angling the LiDAR, the system can capture information about the tunnel walls and floor, which can be used to accurately estimate the UAV's position and orientation within the tunnel.
The researchers develop a navigation algorithm that fuses the data from the tilted LiDAR with inertial measurement unit (IMU) data to simultaneously localize the UAV and map the tunnel environment. This SLAM (Simultaneous Localization and Mapping) approach allows the UAV to navigate safely through the tunnel without relying on external reference points or GPS.
Through simulation experiments, the authors demonstrate the effectiveness of their method in challenging tunnel environments with varying sizes and geometries. They show that the tilted LiDAR configuration outperforms a conventional downward-facing LiDAR setup in terms of localization accuracy and robustness to tunnel features.
Critical Analysis
The paper presents a promising approach for enabling UAV navigation in confined tunnel environments. By leveraging the unique perspective of a tilted LiDAR sensor, the researchers have developed a novel SLAM-based navigation system that can effectively localize the UAV and map the tunnel surroundings.
One potential limitation of the research is the reliance on simulation experiments. While the simulated environments were designed to be representative of real-world tunnels, further validation using physical UAV platforms and actual tunnel settings would strengthen the claims about the method's practicality and robustness.
Additionally, the paper does not address potential challenges related to sensor occlusion, such as when the UAV is flying close to the tunnel walls or when there are obstacles or debris present. Investigating the system's performance under these more realistic, dynamic conditions could provide valuable insights for real-world deployment.
Another area for further research could be exploring the integration of the tilted LiDAR approach with other sensing modalities, such as edge detection neural networks or terrain information completeness, to enhance the UAV's perception and decision-making capabilities in complex tunnel environments.
Conclusion
The presented research addresses an important challenge in the field of UAV navigation: enabling reliable and accurate operation in confined, GPS-denied environments like tunnels. By introducing a novel approach that leverages tilted LiDAR sensors, the researchers have developed a SLAM-based navigation system that can effectively localize a UAV and map its surroundings within a tunnel.
This work has significant implications for applications where UAVs need to operate in restricted spaces, such as infrastructure inspection, search and rescue missions, and navigation under forest canopies. The findings from this research could also inspire further advancements in bipedal safe navigation and other domains where precise localization in complex environments is crucial.
Overall, this paper showcases a promising solution for enhancing the capabilities of UAVs in challenging tunnel environments, paving the way for more robust and versatile aerial robotic applications in the future.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Under-Canopy Navigation using Aerial Lidar Maps
Lucas Carvalho de Lima, Nicholas Lawrance, Kasra Khosoussi, Paulo Borges, Michael Bruenig
0
0
Autonomous navigation in unstructured natural environments poses a significant challenge. In goal navigation tasks without prior information, the limited look-ahead of onboard sensors utilised by robots compromises path efficiency. We propose a novel approach that leverages an above-the-canopy aerial map for improved ground robot navigation. Our system utilises aerial lidar scans to create a 3D probabilistic occupancy map, uniquely incorporating the uncertainty in the aerial vehicle's trajectory for improved accuracy. Novel path planning cost functions are introduced, combining path length with obstruction risk estimated from the probabilistic map. The D-Star Lite algorithm then calculates an optimal (minimum-cost) path to the goal. This system also allows for dynamic replanning upon encountering unforeseen obstacles on the ground. Extensive experiments and ablation studies in simulated and real forests demonstrate the effectiveness of our system.
6/19/2024
Leveraging edge detection and neural networks for better UAV localization
Theo Di Piazza, Enric Meinhardt-Llopis, Gabriele Facciolo, Benedicte Bascle, Corentin Abgrall, Jean-Clement Devaux
0
0
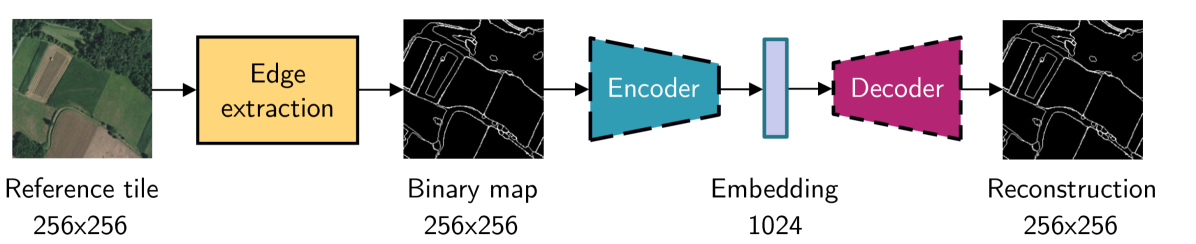
We propose a novel method for geolocalizing Unmanned Aerial Vehicles (UAVs) in environments lacking Global Navigation Satellite Systems (GNSS). Current state-of-the-art techniques employ an offline-trained encoder to generate a vector representation (embedding) of the UAV's current view, which is then compared with pre-computed embeddings of geo-referenced images to determine the UAV's position. Here, we demonstrate that the performance of these methods can be significantly enhanced by preprocessing the images to extract their edges, which exhibit robustness to seasonal and illumination variations. Furthermore, we establish that utilizing edges enhances resilience to orientation and altitude inaccuracies. Additionally, we introduce a confidence criterion for localization. Our findings are substantiated through synthetic experiments.
6/4/2024

Clustering-based Learning for UAV Tracking and Pose Estimation
Jiaping Xiao, Phumrapee Pisutsin, Cheng Wen Tsao, Mir Feroskhan
0
0
UAV tracking and pose estimation plays an imperative role in various UAV-related missions, such as formation control and anti-UAV measures. Accurately detecting and tracking UAVs in a 3D space remains a particularly challenging problem, as it requires extracting sparse features of micro UAVs from different flight environments and continuously matching correspondences, especially during agile flight. Generally, cameras and LiDARs are the two main types of sensors used to capture UAV trajectories in flight. However, both sensors have limitations in UAV classification and pose estimation. This technical report briefly introduces the method proposed by our team NTU-ICG for the CVPR 2024 UG2+ Challenge Track 5. This work develops a clustering-based learning detection approach, CL-Det, for UAV tracking and pose estimation using two types of LiDARs, namely Livox Avia and LiDAR 360. We combine the information from the two data sources to locate drones in 3D. We first align the timestamps of Livox Avia data and LiDAR 360 data and then separate the point cloud of objects of interest (OOIs) from the environment. The point cloud of OOIs is clustered using the DBSCAN method, with the midpoint of the largest cluster assumed to be the UAV position. Furthermore, we utilize historical estimations to fill in missing data. The proposed method shows competitive pose estimation performance and ranks 5th on the final leaderboard of the CVPR 2024 UG2+ Challenge.
5/28/2024

LiCS: Navigation using Learned-imitation on Cluttered Space
Joshua Julian Damanik, Jae-Won Jung, Chala Adane Deresa, Han-Lim Choi
0
0
In this letter, we propose a robust and fast navigation system in a narrow indoor environment for UGV (Unmanned Ground Vehicle) using 2D LiDAR and odometry. We used behavior cloning with Transformer neural network to learn the optimization-based baseline algorithm. We inject Gaussian noise during expert demonstration to increase the robustness of learned policy. We evaluate the performance of LiCS using both simulation and hardware experiments. It outperforms all other baselines in terms of navigation performance and can maintain its robust performance even on highly cluttered environments. During the hardware experiments, LiCS can maintain safe navigation at maximum speed of $1.5 m/s$.
6/24/2024