Unifying 3D Representation and Control of Diverse Robots with a Single Camera

0

Sign in to get full access
Overview
- This paper introduces a novel "Neural Jacobian Field" approach that enables a single camera to represent and control diverse robots in 3D
- The method can learn the 3D geometry and kinematics of a robot from visual observations alone, without prior knowledge
- It can then use this learned representation to control the robot's end-effector in 3D space, even for complex robotic systems
Plain English Explanation
The researchers have developed a way for a single camera to understand and control different types of robots in 3D space. Typically, controlling a robot requires knowing detailed information about its structure and how its parts move. But with this new "Neural Jacobian Field" approach, the camera can learn all of that just by observing the robot.
The camera builds an internal 3D model of the robot, including its geometry and how its joints move, without being programmed with that information ahead of time. Then, it can use that learned model to precisely control the robot's end-effector - the part that interacts with the world - and make it move around in 3D space. This works for all kinds of robots, from simple arms to complex humanoids, using just a single camera as the input.
This advance could make it much easier to develop and control robotic systems, by eliminating the need for detailed programming of each robot's specifics. It also opens up new possibilities for flexible, adaptable robots that can be quickly deployed and retrained for different tasks.
Technical Explanation
The key innovation of this paper is the "Neural Jacobian Field" (NJF) - a neural network that can learn the 3D geometry and kinematics of a robot from visual observations alone. The NJF represents the robot's Jacobian matrix, which describes how the robot's joint angles affect the position and orientation of its end-effector.
By training the NJF on images of the robot moving, the system can build an internal 3D model of the robot's structure and kinematics. It can then use this learned model to control the robot's end-effector, guiding it to a desired 3D position and orientation using inverse kinematics.
The researchers demonstrate this approach on a variety of robot systems, from simple planar arms to complex humanoid robots. They show that the NJF can generalize to new robot configurations and outperform traditional hand-engineered methods for robot control.
Critical Analysis
A key strength of this approach is its ability to learn robot representations and control policies from visual data alone, without requiring any prior knowledge about the robot's structure or kinematics. This makes it highly flexible and adaptable - the system can be applied to new robots with minimal effort.
However, the paper does not address how well the NJF would scale to robots with a very large number of degrees of freedom, such as dexterous robotic hands. The computational and sample complexity of learning high-dimensional Jacobian fields could become challenging.
Additionally, while the paper demonstrates control of the robot's end-effector, it does not explore how the NJF might be extended to control the full robot configuration, including internal joint angles. This could be an important limitation for tasks requiring precise whole-body control.
Overall, this is an impressive and promising approach that could significantly simplify the development and deployment of robotic systems. Further research is needed to address its scalability and extend its capabilities, but the core idea of learning rich 3D robot representations from visual data alone is a notable contribution.
Conclusion
This paper presents a novel "Neural Jacobian Field" method that allows a single camera to learn the 3D geometry and kinematics of diverse robots, and then use that learned representation to control the robots' end-effectors in 3D space. By eliminating the need for detailed prior programming of each robot's specifics, this approach could greatly simplify the development and deployment of flexible, adaptable robotic systems. While further research is needed to address scalability and whole-body control, the core ideas demonstrated here represent an important step forward in unifying 3D scene understanding and robotic control.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Unifying 3D Representation and Control of Diverse Robots with a Single Camera
Sizhe Lester Li, Annan Zhang, Boyuan Chen, Hanna Matusik, Chao Liu, Daniela Rus, Vincent Sitzmann
Mirroring the complex structures and diverse functions of natural organisms is a long-standing challenge in robotics. Modern fabrication techniques have dramatically expanded feasible hardware, yet deploying these systems requires control software to translate desired motions into actuator commands. While conventional robots can easily be modeled as rigid links connected via joints, it remains an open challenge to model and control bio-inspired robots that are often multi-material or soft, lack sensing capabilities, and may change their material properties with use. Here, we introduce Neural Jacobian Fields, an architecture that autonomously learns to model and control robots from vision alone. Our approach makes no assumptions about the robot's materials, actuation, or sensing, requires only a single camera for control, and learns to control the robot without expert intervention by observing the execution of random commands. We demonstrate our method on a diverse set of robot manipulators, varying in actuation, materials, fabrication, and cost. Our approach achieves accurate closed-loop control and recovers the causal dynamic structure of each robot. By enabling robot control with a generic camera as the only sensor, we anticipate our work will dramatically broaden the design space of robotic systems and serve as a starting point for lowering the barrier to robotic automation.
Read more7/12/2024
0
Unifying Scene Representation and Hand-Eye Calibration with 3D Foundation Models
Weiming Zhi, Haozhan Tang, Tianyi Zhang, Matthew Johnson-Roberson
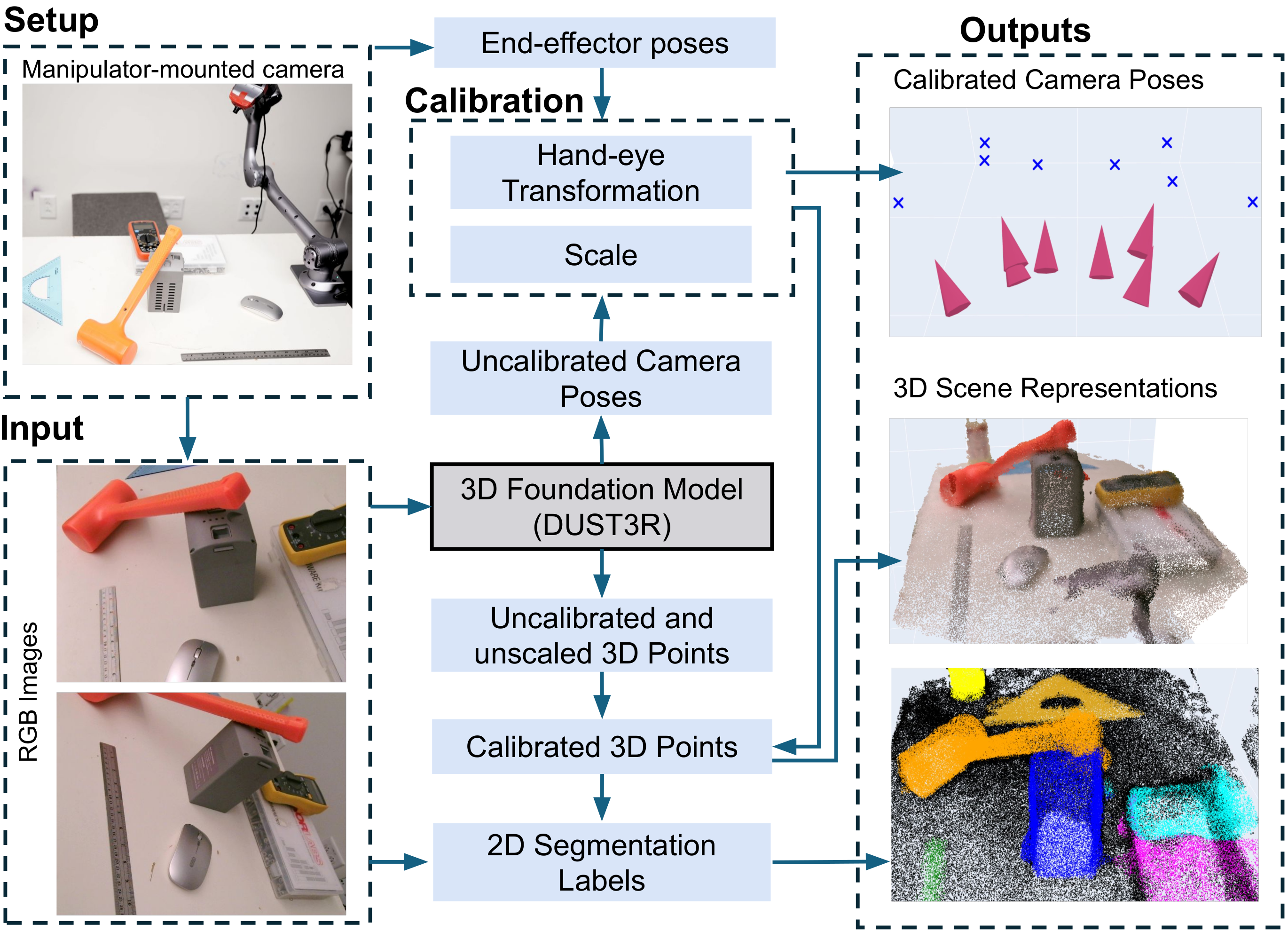
Representing the environment is a central challenge in robotics, and is essential for effective decision-making. Traditionally, before capturing images with a manipulator-mounted camera, users need to calibrate the camera using a specific external marker, such as a checkerboard or AprilTag. However, recent advances in computer vision have led to the development of emph{3D foundation models}. These are large, pre-trained neural networks that can establish fast and accurate multi-view correspondences with very few images, even in the absence of rich visual features. This paper advocates for the integration of 3D foundation models into scene representation approaches for robotic systems equipped with manipulator-mounted RGB cameras. Specifically, we propose the Joint Calibration and Representation (JCR) method. JCR uses RGB images, captured by a manipulator-mounted camera, to simultaneously construct an environmental representation and calibrate the camera relative to the robot's end-effector, in the absence of specific calibration markers. The resulting 3D environment representation is aligned with the robot's coordinate frame and maintains physically accurate scales. We demonstrate that JCR can build effective scene representations using a low-cost RGB camera attached to a manipulator, without prior calibration.
Read more4/19/2024
🧠
0
High-Degrees-of-Freedom Dynamic Neural Fields for Robot Self-Modeling and Motion Planning
Lennart Schulze, Hod Lipson
A robot self-model is a task-agnostic representation of the robot's physical morphology that can be used for motion planning tasks in the absence of a classical geometric kinematic model. In particular, when the latter is hard to engineer or the robot's kinematics change unexpectedly, human-free self-modeling is a necessary feature of truly autonomous agents. In this work, we leverage neural fields to allow a robot to self-model its kinematics as a neural-implicit query model learned only from 2D images annotated with camera poses and configurations. This enables significantly greater applicability than existing approaches which have been dependent on depth images or geometry knowledge. To this end, alongside a curricular data sampling strategy, we propose a new encoder-based neural density field architecture for dynamic object-centric scenes conditioned on high numbers of degrees of freedom (DOFs). In a 7-DOF robot test setup, the learned self-model achieves a Chamfer-L2 distance of 2% of the robot's workspace dimension. We demonstrate the capabilities of this model on motion planning tasks as an exemplary downstream application.
Read more4/22/2024

0
Angle-Aware Coverage with Camera Rotational Motion Control
Zhiyuan Lu, Muhammad Hanif, Takumi Shimizu, Takeshi Hatanaka
This paper presents a novel control strategy for drone networks to improve the quality of 3D structures reconstructed from aerial images by drones. Unlike the existing coverage control strategies for this purpose, our proposed approach simultaneously controls both the camera orientation and drone translational motion, enabling more comprehensive perspectives and enhancing the map's overall quality. Subsequently, we present a novel problem formulation, including a new performance function to evaluate the drone positions and camera orientations. We then design a QP-based controller with a control barrier-like function for a constraint on the decay rate of the objective function. The present problem formulation poses a new challenge, requiring significantly greater computational efforts than the case involving only translational motion control. We approach this issue technologically, namely by introducing JAX, utilizing just-in-time (JIT) compilation and Graphical Processing Unit (GPU) acceleration. We finally conduct extensive verifications through simulation in ROS (Robot Operating System) and show the real-time feasibility of the controller and the superiority of the present controller to the conventional method.
Read more4/23/2024