Angle-Aware Coverage with Camera Rotational Motion Control

0

Sign in to get full access
Overview
- Presents a novel approach for camera-based coverage of a virtual field using drone rotational motion control
- Aims to optimize the angle of the camera relative to the target surface to improve coverage and reduce occlusion
- Introduces an optimization-based algorithm to plan drone trajectories that balance coverage and angle-awareness
Plain English Explanation
The paper describes a system for controlling the motion of drones equipped with cameras to efficiently cover a virtual field or area of interest. The key innovation is the use of "angle-aware" planning, which means the system tries to orient the camera on the drone at the optimal angle relative to the target surface. This helps reduce occlusions and ensure better coverage compared to just trying to maximize the area covered.
The authors develop an optimization-based algorithm to plan the drone's trajectory, balancing the competing objectives of maximizing coverage area and maintaining the ideal camera angle. This allows the drone to navigate the virtual field in a way that captures high-quality imagery without missing important parts of the target area.
This type of angle-aware coverage could be useful for applications like automated real-time inspection of indoor and outdoor 3D environments, aerial search and rescue missions, or even generating 6D trajectories for omnidirectional multirotor aerial vehicles. By considering the camera angle, the system can capture high-quality data that is more useful for downstream tasks.
Technical Explanation
The paper presents an "angle-aware coverage" approach for controlling the motion of drones equipped with cameras to efficiently cover a virtual field or area of interest. The key components are:
-
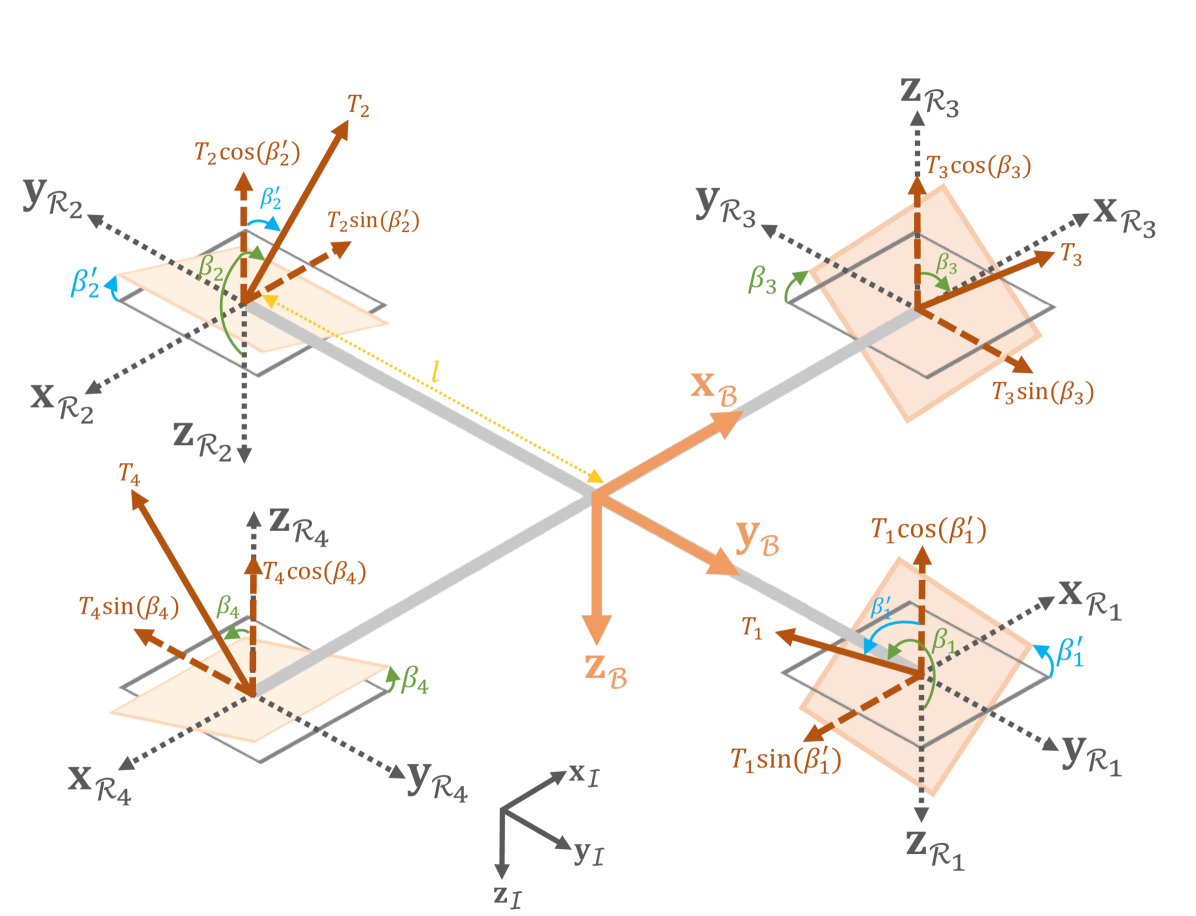
Drones, Virtual Field, and Geometry: The authors define a virtual field represented as a 3D polygonal mesh, along with a fleet of drones equipped with cameras. Each drone has 6 degrees of freedom (position and orientation) that can be controlled.
-
Angle-Aware Coverage Objective: The goal is to plan the drone trajectories to maximize the coverage of the virtual field while also ensuring the camera is oriented at the optimal angle relative to the target surface. This "angle-awareness" helps reduce occlusions and improve the quality of the captured data.
-
Optimization-based Trajectory Planning: The authors develop an optimization-based algorithm to plan the drone trajectories. This involves formulating an objective function that combines coverage area and angle-awareness, and then using numerical optimization techniques to find the best trajectories.
-
Experiments and Results: The authors evaluate their approach through simulation experiments, comparing it to baseline methods that do not consider camera angle. The results show the angle-aware approach can achieve better coverage while maintaining high-quality camera angles.
Critical Analysis
The paper presents a well-designed and innovative approach to the problem of camera-based coverage using drone motion control. The angle-awareness aspect is a key contribution that helps address an important limitation of previous work, which focused solely on maximizing coverage area.
However, the paper does not discuss potential limitations or challenges of the proposed approach. For example, it's unclear how the system would handle dynamic environments or scenarios with multiple obstacles. Additionally, the reliance on numerical optimization techniques may raise concerns about computational complexity and real-time performance, especially for large-scale or time-critical applications.
Further research could explore ways to make the angle-aware planning more robust and efficient, perhaps by incorporating machine learning techniques or hierarchical planning approaches. It would also be valuable to validate the method on real-world drone platforms and evaluate its performance in more complex, realistic scenarios.
Conclusion
This paper introduces an innovative "angle-aware coverage" approach for controlling the motion of drones equipped with cameras to efficiently capture data from a virtual field or area of interest. By considering the optimal camera angle relative to the target surface, the system can improve coverage quality and reduce occlusions compared to previous methods that focused solely on maximizing coverage area.
The optimization-based planning algorithm developed by the authors represents a significant contribution to the field of sensor-based multi-robot coverage control. This work could have important implications for a wide range of applications, from automated 3D inspection to aerial search and rescue missions to omnidirectional multirotor control. By prioritizing both coverage and angle-awareness, the system can capture high-quality data that is more useful for downstream tasks and decision-making.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Angle-Aware Coverage with Camera Rotational Motion Control
Zhiyuan Lu, Muhammad Hanif, Takumi Shimizu, Takeshi Hatanaka
This paper presents a novel control strategy for drone networks to improve the quality of 3D structures reconstructed from aerial images by drones. Unlike the existing coverage control strategies for this purpose, our proposed approach simultaneously controls both the camera orientation and drone translational motion, enabling more comprehensive perspectives and enhancing the map's overall quality. Subsequently, we present a novel problem formulation, including a new performance function to evaluate the drone positions and camera orientations. We then design a QP-based controller with a control barrier-like function for a constraint on the decay rate of the objective function. The present problem formulation poses a new challenge, requiring significantly greater computational efforts than the case involving only translational motion control. We approach this issue technologically, namely by introducing JAX, utilizing just-in-time (JIT) compilation and Graphical Processing Unit (GPU) acceleration. We finally conduct extensive verifications through simulation in ROS (Robot Operating System) and show the real-time feasibility of the controller and the superiority of the present controller to the conventional method.
Read more4/23/2024
👨🏫
0
Geometric Tracking Control of Omnidirectional Multirotors for Aggressive Maneuvers
Hyungyu Lee, Sheng Cheng, Zhuohuan Wu, Jaeyoung Lim, Roland Siegwart, Naira Hovakimyan
An omnidirectional multirotor has the maneuverability of decoupled translational and rotational motions, superseding the traditional multirotors' motion capability. Such maneuverability is achieved due to the ability of the omnidirectional multirotor to frequently alter the thrust amplitude and direction. In doing so, the rotors' settling time, which is induced by inherent rotor dynamics, significantly affects the omnidirectional multirotor's tracking performance, especially in aggressive flights. To resolve this issue, we propose a novel tracking controller that takes the rotor dynamics into account and does not require additional rotor state measurement. We prove that the proposed controller yields almost global exponential stability. The proposed controller is validated in experiments, where we demonstrate significantly improved tracking performance in multiple aggressive maneuvers compared with a baseline geometric PD controller.
Read more8/19/2024

0
Trajectory Tracking for Unmanned Aerial Vehicles in 3D Spaces under Motion Constraints
Saurabh Kumar, Shashi Ranjan Kumar, Abhinav Sinha
This article presents a three-dimensional nonlinear trajectory tracking control strategy for unmanned aerial vehicles (UAVs) in the presence of spatial constraints. As opposed to many existing control strategies, which do not consider spatial constraints, the proposed strategy considers spatial constraints on each degree of freedom movement of the UAV. Such consideration makes the design appealing for many practical applications, such as pipeline inspection, boundary tracking, etc. The proposed design accounts for the limited information about the inertia matrix, thereby affirming its inherent robustness against unmodeled dynamics and other imperfections. We rigorously show that the UAV will converge to its desired path by maintaining bounded position, orientation, and linear and angular speeds. Finally, we demonstrate the effectiveness of the proposed strategy through various numerical simulations.
Read more7/16/2024
0
Nonlinear Model Predictive Control of Tiltrotor Quadrotors with Feasible Control Allocation
Zeinab Shayan, Jann Cristobal, Mohammadreza Izadi, Amin Yazdanshenas, Mehdi Naderi, Reza Faieghi
This paper presents a new flight control framework for tilt-rotor multirotor uncrewed aerial vehicles (MRUAVs). Tiltrotor designs offer full actuation but introduce complexity in control allocation due to actuator redundancy. We propose a new approach where the allocator is tightly coupled with the controller, ensuring that the control signals generated by the controller are feasible within the vehicle actuation space. We leverage nonlinear model predictive control (NMPC) to implement the above framework, providing feasible control signals and optimizing performance. This unified control structure simultaneously manages both position and attitude, which eliminates the need for cascaded position and attitude control loops. Extensive numerical experiments demonstrate that our approach significantly outperforms conventional techniques that are based on linear quadratic regulator (LQR) and sliding mode control (SMC), especially in high-acceleration trajectories and disturbance rejection scenarios, making the proposed approach a viable option for enhanced control precision and robustness, particularly in challenging missions.
Read more6/26/2024