VIRUS-NeRF -- Vision, InfraRed and UltraSonic based Neural Radiance Fields

0
Sign in to get full access
Overview
- This paper presents VIRUS-NeRF, a novel approach that combines vision, infrared, and ultrasonic sensors to create high-quality neural radiance fields (NeRF) for 3D scene reconstruction.
- The key innovation is the integration of multiple sensor modalities to improve the robustness and accuracy of the NeRF reconstruction, particularly in challenging environments.
- The authors demonstrate the effectiveness of VIRUS-NeRF through extensive experiments and comparisons to state-of-the-art methods.
Plain English Explanation
VIRUS-NeRF is a new way to create detailed 3D models of real-world scenes using a combination of different types of sensors. Traditional NeRF models rely solely on visual information from cameras, but this can be challenging in certain environments, like those with low light or complex geometries.
To address these limitations, the VIRUS-NeRF approach incorporates data from vision, infrared, and ultrasonic sensors. By fusing information from multiple modalities, the system can build more robust and accurate 3D representations, even in tricky situations. The "VIRUS" in the name stands for this combination of sensor types.
The key advantage of VIRUS-NeRF is its ability to handle a wider range of real-world conditions, making it more practical for applications like robotics, augmented reality, and 3D mapping. The authors show through experiments that VIRUS-NeRF outperforms traditional NeRF methods in terms of reconstruction quality and robustness.
Technical Explanation
The core of the VIRUS-NeRF approach is the integration of data from multiple sensor modalities - vision, infrared, and ultrasonic - to improve the quality and reliability of the neural radiance field (NeRF) reconstruction.
Traditional NeRF models rely solely on RGB image data, which can struggle in certain environments, such as those with low lighting or complex geometry. To address these limitations, the VIRUS-NeRF system incorporates additional sensor inputs:
- Vision: Standard RGB camera
- Infrared: Thermal infrared camera
- Ultrasonic: Ultrasonic rangefinder
By fusing the information from these diverse sensors, the VIRUS-NeRF model can better handle challenging conditions and produce more robust 3D reconstructions.
The authors evaluate VIRUS-NeRF through extensive experiments, comparing it to state-of-the-art NeRF methods on various datasets. The results demonstrate that VIRUS-NeRF consistently outperforms the baselines in terms of reconstruction quality, as measured by metrics like PSNR and SSIM.
Critical Analysis
The paper acknowledges some limitations of the VIRUS-NeRF approach, such as the need for careful sensor calibration and the potential for interference between the different modalities. Additionally, the system may be more computationally expensive than single-sensor NeRF models due to the additional processing required for the multi-modal fusion.
Further research could explore ways to optimize the sensor integration and investigate the trade-offs between reconstruction quality and computational efficiency. It would also be interesting to see how VIRUS-NeRF performs in a wider range of real-world scenarios, including dynamic environments and larger-scale applications.
Conclusion
The VIRUS-NeRF approach represents a significant advancement in neural radiance field reconstruction by leveraging multiple sensor modalities to create more robust and accurate 3D models. The integration of vision, infrared, and ultrasonic data allows the system to handle a broader range of environmental conditions, making it a promising tool for applications such as robotics, augmented reality, and 3D mapping.
While the system has some limitations, the promising results demonstrated in this paper suggest that the VIRUS-NeRF concept could have a substantial impact on the field of 3D scene understanding and reconstruction.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
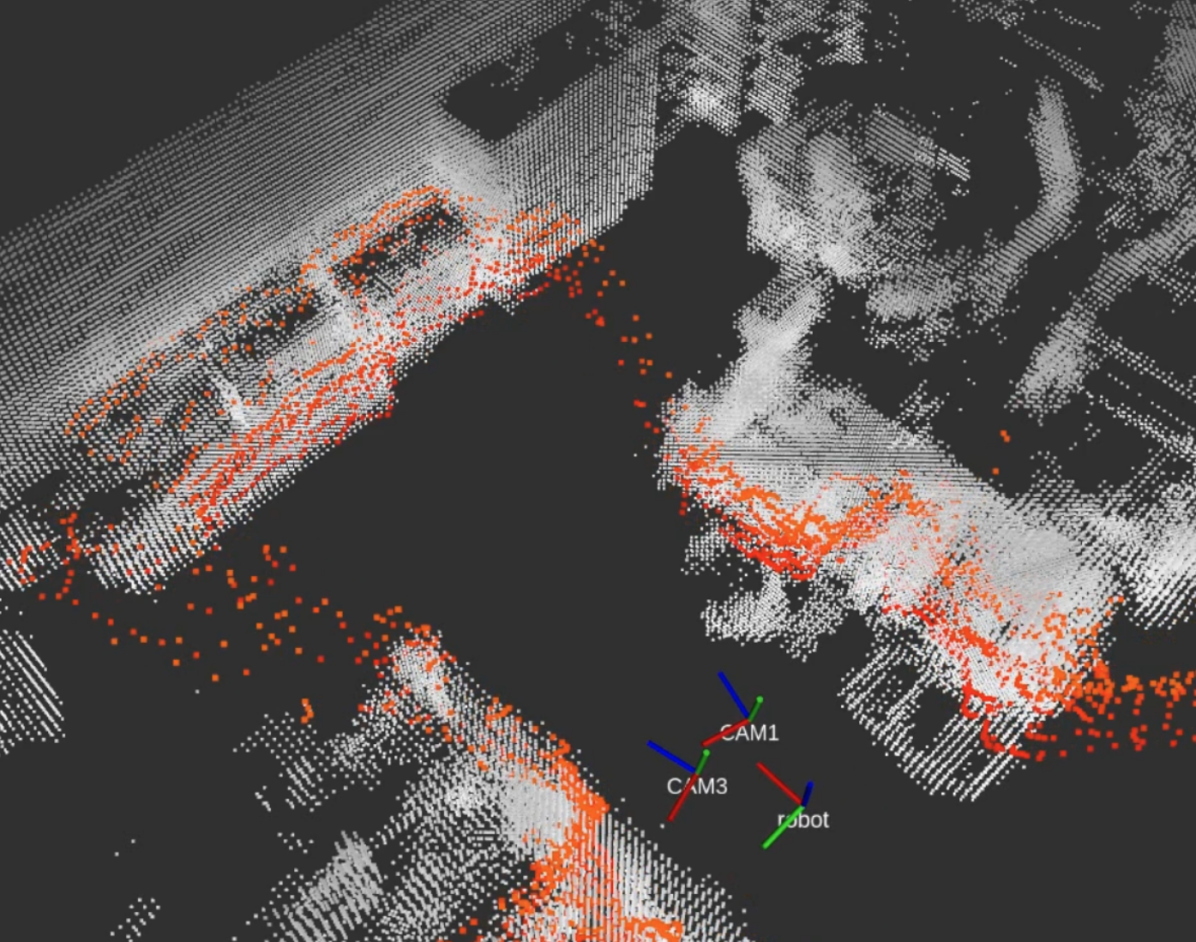
VIRUS-NeRF -- Vision, InfraRed and UltraSonic based Neural Radiance Fields
Nicolaj Schmid, Cornelius von Einem, Cesar Cadena, Roland Siegwart, Lorenz Hruby, Florian Tschopp
Autonomous mobile robots are an increasingly integral part of modern factory and warehouse operations. Obstacle detection, avoidance and path planning are critical safety-relevant tasks, which are often solved using expensive LiDAR sensors and depth cameras. We propose to use cost-effective low-resolution ranging sensors, such as ultrasonic and infrared time-of-flight sensors by developing VIRUS-NeRF - Vision, InfraRed, and UltraSonic based Neural Radiance Fields. Building upon Instant Neural Graphics Primitives with a Multiresolution Hash Encoding (Instant-NGP), VIRUS-NeRF incorporates depth measurements from ultrasonic and infrared sensors and utilizes them to update the occupancy grid used for ray marching. Experimental evaluation in 2D demonstrates that VIRUS-NeRF achieves comparable mapping performance to LiDAR point clouds regarding coverage. Notably, in small environments, its accuracy aligns with that of LiDAR measurements, while in larger ones, it is bounded by the utilized ultrasonic sensors. An in-depth ablation study reveals that adding ultrasonic and infrared sensors is highly effective when dealing with sparse data and low view variation. Further, the proposed occupancy grid of VIRUS-NeRF improves the mapping capabilities and increases the training speed by 46% compared to Instant-NGP. Overall, VIRUS-NeRF presents a promising approach for cost-effective local mapping in mobile robotics, with potential applications in safety and navigation tasks. The code can be found at https://github.com/ethz-asl/virus nerf.
Read more8/15/2024
0
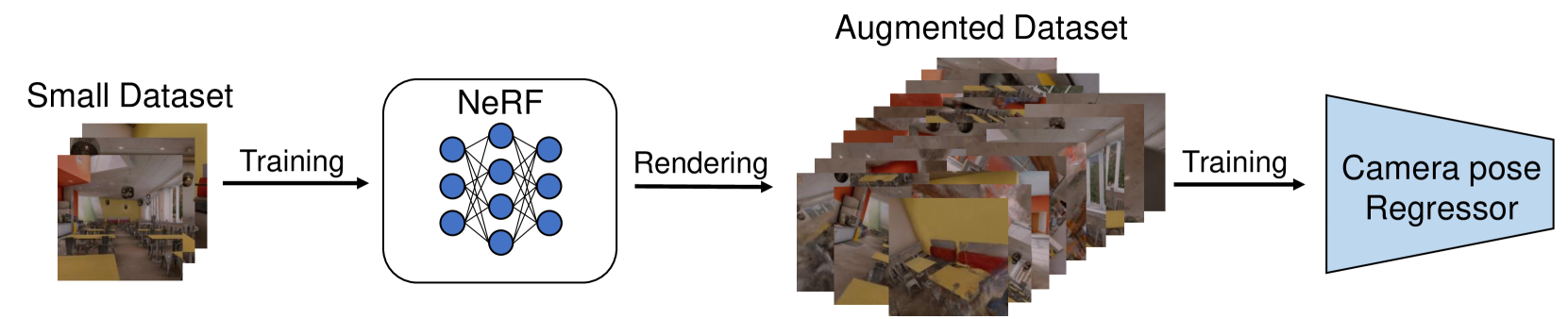
NVINS: Robust Visual Inertial Navigation Fused with NeRF-augmented Camera Pose Regressor and Uncertainty Quantification
Juyeop Han, Lukas Lao Beyer, Guilherme V. Cavalheiro, Sertac Karaman
In recent years, Neural Radiance Fields (NeRF) have emerged as a powerful tool for 3D reconstruction and novel view synthesis. However, the computational cost of NeRF rendering and degradation in quality due to the presence of artifacts pose significant challenges for its application in real-time and robust robotic tasks, especially on embedded systems. This paper introduces a novel framework that integrates NeRF-derived localization information with Visual-Inertial Odometry (VIO) to provide a robust solution for real-time robotic navigation. By training an absolute pose regression network with augmented image data rendered from a NeRF and quantifying its uncertainty, our approach effectively counters positional drift and enhances system reliability. We also establish a mathematically sound foundation for combining visual inertial navigation with camera localization neural networks, considering uncertainty under a Bayesian framework. Experimental validation in a photorealistic simulation environment demonstrates significant improvements in accuracy compared to a conventional VIO approach.
Read more8/20/2024
🧠
0
Benchmarking Neural Radiance Fields for Autonomous Robots: An Overview
Yuhang Ming, Xingrui Yang, Weihan Wang, Zheng Chen, Jinglun Feng, Yifan Xing, Guofeng Zhang
Neural Radiance Fields (NeRF) have emerged as a powerful paradigm for 3D scene representation, offering high-fidelity renderings and reconstructions from a set of sparse and unstructured sensor data. In the context of autonomous robotics, where perception and understanding of the environment are pivotal, NeRF holds immense promise for improving performance. In this paper, we present a comprehensive survey and analysis of the state-of-the-art techniques for utilizing NeRF to enhance the capabilities of autonomous robots. We especially focus on the perception, localization and navigation, and decision-making modules of autonomous robots and delve into tasks crucial for autonomous operation, including 3D reconstruction, segmentation, pose estimation, simultaneous localization and mapping (SLAM), navigation and planning, and interaction. Our survey meticulously benchmarks existing NeRF-based methods, providing insights into their strengths and limitations. Moreover, we explore promising avenues for future research and development in this domain. Notably, we discuss the integration of advanced techniques such as 3D Gaussian splatting (3DGS), large language models (LLM), and generative AIs, envisioning enhanced reconstruction efficiency, scene understanding, decision-making capabilities. This survey serves as a roadmap for researchers seeking to leverage NeRFs to empower autonomous robots, paving the way for innovative solutions that can navigate and interact seamlessly in complex environments.
Read more7/29/2024

0
NeRFoot: Robot-Footprint Estimation for Image-Based Visual Servoing
Daoxin Zhong, Luke Robinson, Daniele De Martini
This paper investigates the utility of Neural Radiance Fields (NeRF) models in extending the regions of operation of a mobile robot, controlled by Image-Based Visual Servoing (IBVS) via static CCTV cameras. Using NeRF as a 3D-representation prior, the robot's footprint may be extrapolated geometrically and used to train a CNN-based network to extract it online from the robot's appearance alone. The resulting footprint results in a tighter bound than a robot-wide bounding box, allowing the robot's controller to prescribe more optimal trajectories and expand its safe operational floor area.
Read more8/6/2024