Vision-Based Adaptive Robotics for Autonomous Surface Crack Repair

0
👁️
Sign in to get full access
Overview
- Manual repair of surface cracks in infrastructure is labor-intensive, time-consuming, and imprecise.
- Autonomous robotic systems can improve the efficiency and accuracy of crack detection and repair.
- This paper presents an adaptive, autonomous system for surface crack detection and repair using advanced sensing technologies.
Plain English Explanation
The paper describes a robotic system for automatically detecting and repairing surface cracks in infrastructure. Cracks in roads, bridges, and other structures can lead to significant deterioration if not addressed promptly. Traditional manual repair methods are challenging to scale to large areas, as they are labor-intensive and imprecise.
The proposed system uses an RGB-D camera to detect cracks, a laser scanner to measure their size precisely, and an extruder and pump to fill the cracks with repair material. Importantly, the system is designed to be adaptive, meaning it can adjust its repair process based on the specific size and characteristics of each crack.
The researchers developed a novel validation procedure using 3D-printed crack specimens to test the system's performance in a controlled, repeatable way. Their experiments showed that the adaptive system is more efficient and effective than a fixed-speed approach, consistently filling cracks with high precision.
Technical Explanation
The paper presents an end-to-end robotic system for autonomous surface crack detection and repair. The system uses an RGB-D camera for crack detection, a laser scanner for precise crack measurement, and an extruder and pump for filling the cracks with repair material.
The key innovation is the adaptive repair process, where the system adjusts the material deposition speed and other parameters based on the specific size and characteristics of each detected crack. This allows the system to be more efficient and effective than a fixed-speed approach.
To validate the system's performance, the researchers developed a novel testing procedure using 3D-printed crack specimens that simulate real-world cracks. This enables repeatable testing and evaluation of the system's precision and consistency in crack filling.
The experimental results confirm that the adaptive system outperforms a fixed-speed approach, demonstrating the benefits of adjusting the repair process to the specific crack characteristics.
Critical Analysis
The paper presents a comprehensive approach to autonomous crack detection and repair, addressing key challenges such as adaptability and validation. However, the researchers acknowledge that the system has not been tested on real-world infrastructure, which may present additional challenges not captured by the 3D-printed crack specimens.
Further research is needed to assess the system's performance in a variety of environmental conditions, crack sizes and types, and infrastructure materials. Additionally, the long-term durability and longevity of the automated crack repairs should be evaluated.
While the paper demonstrates the potential of this technology, it is important to consider the broader implications and challenges of deploying autonomous systems for infrastructure maintenance. Factors such as cost, scalability, and integration with existing maintenance workflows will be crucial in determining the real-world impact of this research.
Conclusion
This paper presents an innovative, adaptive robotic system for autonomous surface crack detection and repair. The use of advanced sensing technologies and an adaptive repair process enables efficient and precise crack filling, which could significantly improve the maintenance of infrastructure and reduce costly deterioration.
The validated performance of the system on simulated cracks suggests that this research lays the groundwork for versatile, reliable robotic infrastructure maintenance. Further development and real-world testing will be necessary to fully realize the potential of this technology and address any remaining challenges.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
👁️
0
Vision-Based Adaptive Robotics for Autonomous Surface Crack Repair
Joshua Genova, Eric Cabrera, Vedhus Hoskere
Surface cracks in infrastructure can lead to significant deterioration and costly maintenance if not efficiently repaired. Manual repair methods are labor-intensive, time-consuming, and imprecise and thus difficult to scale to large areas. Breakthroughs in robotic perception and manipulation have advanced autonomous crack repair, but proposed methods lack end-to-end testing and adaptability to changing crack size. This paper presents an adaptive, autonomous system for surface crack detection and repair using robotics with advanced sensing technologies. The system uses an RGB-D camera for crack detection, a laser scanner for precise measurement, and an extruder and pump for material deposition. A novel validation procedure with 3D-printed crack specimens simulates real-world cracks and ensures testing repeatability. Our study shows that an adaptive system for crack filling is more efficient and effective than a fixed-speed approach, with experimental results confirming precision and consistency. This research paves the way for versatile, reliable robotic infrastructure maintenance.
Read more7/25/2024
0
Automated Real-Time Inspection in Indoor and Outdoor 3D Environments with Cooperative Aerial Robots
Andreas Anastasiou, Angelos Zacharia, Savvas Papaioannou, Panayiotis Kolios, Christos G. Panayiotou, Marios M. Polycarpou
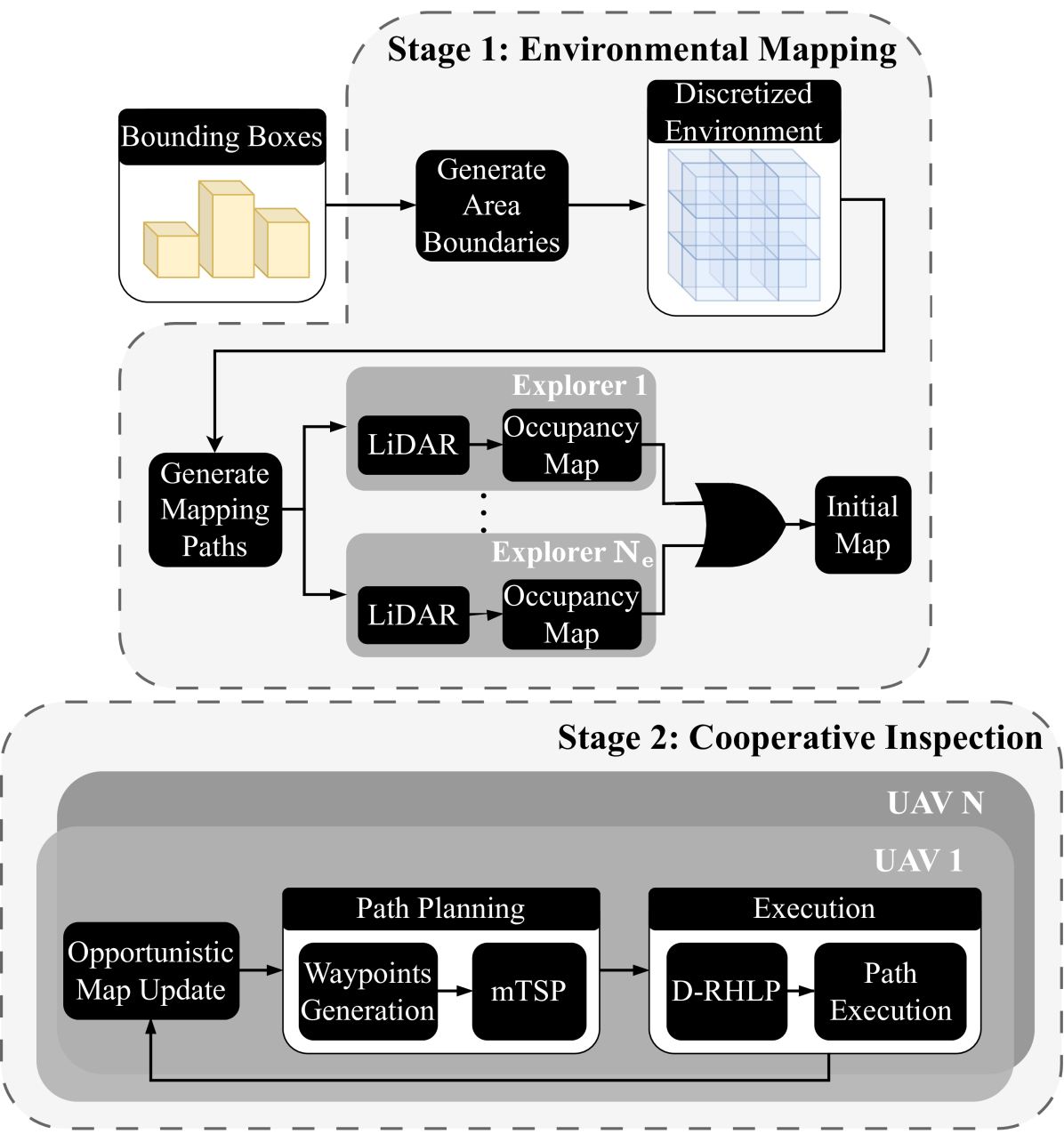
This work introduces a cooperative inspection system designed to efficiently control and coordinate a team of distributed heterogeneous UAV agents for the inspection of 3D structures in cluttered, unknown spaces. Our proposed approach employs a two-stage innovative methodology. Initially, it leverages the complementary sensing capabilities of the robots to cooperatively map the unknown environment. It then generates optimized, collision-free inspection paths, thereby ensuring comprehensive coverage of the structure's surface area. The effectiveness of our system is demonstrated through qualitative and quantitative results from extensive Gazebo-based simulations that closely replicate real-world inspection scenarios, highlighting its ability to thoroughly inspect real-world-like 3D structures.
Read more4/19/2024

0
PSO-Based Optimal Coverage Path Planning for Surface Defect Inspection of 3C Components with a Robotic Line Scanner
Hongpeng Chen, Shengzeng Huo, Muhammad Muddassir, Hoi-Yin Lee, Anqing Duan, Pai Zheng, David Navarro-Alarcon
The automatic inspection of surface defects is an important task for quality control in the computers, communications, and consumer electronics (3C) industry. Conventional devices for defect inspection (viz. line-scan sensors) have a limited field of view, thus, a robot-aided defect inspection system needs to scan the object from multiple viewpoints. Optimally selecting the robot's viewpoints and planning a path is regarded as coverage path planning (CPP), a problem that enables inspecting the object's complete surface while reducing the scanning time and avoiding misdetection of defects. However, the development of CPP strategies for robotic line scanners has not been sufficiently studied by researchers. To fill this gap in the literature, in this paper, we present a new approach for robotic line scanners to detect surface defects of 3C free-form objects automatically. Our proposed solution consists of generating a local path by a new hybrid region segmentation method and an adaptive planning algorithm to ensure the coverage of the complete object surface. An optimization method for the global path sequence is developed to maximize the scanning efficiency. To verify our proposed methodology, we conduct detailed simulation-based and experimental studies on various free-form workpieces, and compare its performance with a state-of-the-art solution. The reported results demonstrate the feasibility and effectiveness of our approach.
Read more7/30/2024
🔎
0
Automated Pavement Cracks Detection and Classification Using Deep Learning
Selvia Nafaa, Hafsa Essam, Karim Ashour, Doaa Emad, Rana Mohamed, Mohammed Elhenawy, Huthaifa I. Ashqar, Abdallah A. Hassan, Taqwa I. Alhadidi
Monitoring asset conditions is a crucial factor in building efficient transportation asset management. Because of substantial advances in image processing, traditional manual classification has been largely replaced by semi-automatic/automatic techniques. As a result, automated asset detection and classification techniques are required. This paper proposes a methodology to detect and classify roadway pavement cracks using the well-known You Only Look Once (YOLO) version five (YOLOv5) and version 8 (YOLOv8) algorithms. Experimental results indicated that the precision of pavement crack detection reaches up to 67.3% under different illumination conditions and image sizes. The findings of this study can assist highway agencies in accurately detecting and classifying asset conditions under different illumination conditions. This will reduce the cost and time that are associated with manual inspection, which can greatly reduce the cost of highway asset maintenance.
Read more6/13/2024