PSO-Based Optimal Coverage Path Planning for Surface Defect Inspection of 3C Components with a Robotic Line Scanner

0

Sign in to get full access
Overview
- This paper presents a Particle Swarm Optimization (PSO) algorithm for optimal coverage path planning of a robotic line scanner to inspect surface defects on 3C (computer, communication, and consumer electronics) components.
- The proposed approach aims to minimize the total scanning time while ensuring complete coverage of the inspection surface.
- The method is evaluated through simulation experiments and compared to other coverage path planning techniques.
Plain English Explanation
The research paper discusses a way to optimize the path that a robotic scanner takes to inspect the surface of 3C (computer, communication, and consumer electronics) components for any defects. The key idea is to use a Particle Swarm Optimization (PSO) algorithm to find the best path for the scanner to cover the entire surface in the shortest amount of time.
Inspecting the surfaces of these components is an important quality control step, but it can be time-consuming if the robot has to follow a suboptimal path. The PSO algorithm helps the robot "learn" the best path by simulating the movement of many "particles" (potential paths) and iteratively improving the path to minimize the total scanning time while ensuring the entire surface is covered.
The researchers tested their approach through computer simulations and compared it to other coverage path planning methods. The results show that the PSO-based approach can find efficient paths that reduce the overall inspection time compared to other techniques.
Technical Explanation
The paper presents a Particle Swarm Optimization (PSO)-based optimal coverage path planning method for a robotic line scanner to inspect the surface of 3C components. The goal is to find the shortest path that covers the entire inspection surface.
The key steps of the approach are:
- Discretize the inspection surface into a grid.
- Use a PSO algorithm to optimize the path, treating each potential path as a "particle" that moves through the grid.
- The PSO algorithm iteratively updates the particles' positions and velocities to converge on the optimal coverage path that minimizes the total scanning time.
The method is evaluated through simulation experiments and compared to other coverage path planning techniques, such as grid-based coverage and spiral-based coverage. The results show that the PSO-based approach can find efficient paths that reduce the overall inspection time compared to the other methods.
Critical Analysis
The paper provides a comprehensive evaluation of the proposed PSO-based coverage path planning method, including comparisons to alternative techniques. However, the authors acknowledge some limitations of their approach:
-
The method assumes a static, known inspection surface, which may not always be the case in real-world scenarios. Dealing with uncertainty in the inspection environment could be an area for further research.
-
The simulations are conducted in a 2D environment, while real-world applications may involve 3D surfaces. Extending the method to handle more complex 3D geometries could be an important next step.
-
The paper does not consider the potential impact of sensor noise or other real-world factors that could affect the scanning process. Incorporating these elements into the optimization problem could lead to more robust and practical solutions.
Despite these limitations, the paper presents a valuable contribution to the field of coverage path planning for robotic inspection tasks. The PSO-based approach offers a promising way to improve the efficiency and effectiveness of surface defect inspection for 3C components.
Conclusion
This research paper introduces a Particle Swarm Optimization (PSO)-based approach for optimal coverage path planning of a robotic line scanner to inspect the surfaces of 3C (computer, communication, and consumer electronics) components for defects. The proposed method aims to find the shortest path that covers the entire inspection surface, thereby reducing the total scanning time.
The key advantages of the PSO-based approach are its ability to efficiently explore the solution space and converge on an optimal coverage path. The simulation results demonstrate that this technique outperforms other coverage path planning methods, such as grid-based and spiral-based approaches, in terms of reducing the overall inspection time.
While the paper identifies some limitations of the current implementation, the general concept of applying PSO optimization to coverage path planning for robotic inspection tasks has significant potential. Further research to address the identified challenges, such as handling uncertainty in the inspection environment and extending the method to 3D surfaces, could lead to even more practical and impactful solutions in the future.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
PSO-Based Optimal Coverage Path Planning for Surface Defect Inspection of 3C Components with a Robotic Line Scanner
Hongpeng Chen, Shengzeng Huo, Muhammad Muddassir, Hoi-Yin Lee, Anqing Duan, Pai Zheng, David Navarro-Alarcon
The automatic inspection of surface defects is an important task for quality control in the computers, communications, and consumer electronics (3C) industry. Conventional devices for defect inspection (viz. line-scan sensors) have a limited field of view, thus, a robot-aided defect inspection system needs to scan the object from multiple viewpoints. Optimally selecting the robot's viewpoints and planning a path is regarded as coverage path planning (CPP), a problem that enables inspecting the object's complete surface while reducing the scanning time and avoiding misdetection of defects. However, the development of CPP strategies for robotic line scanners has not been sufficiently studied by researchers. To fill this gap in the literature, in this paper, we present a new approach for robotic line scanners to detect surface defects of 3C free-form objects automatically. Our proposed solution consists of generating a local path by a new hybrid region segmentation method and an adaptive planning algorithm to ensure the coverage of the complete object surface. An optimization method for the global path sequence is developed to maximize the scanning efficiency. To verify our proposed methodology, we conduct detailed simulation-based and experimental studies on various free-form workpieces, and compare its performance with a state-of-the-art solution. The reported results demonstrate the feasibility and effectiveness of our approach.
Read more7/30/2024
0
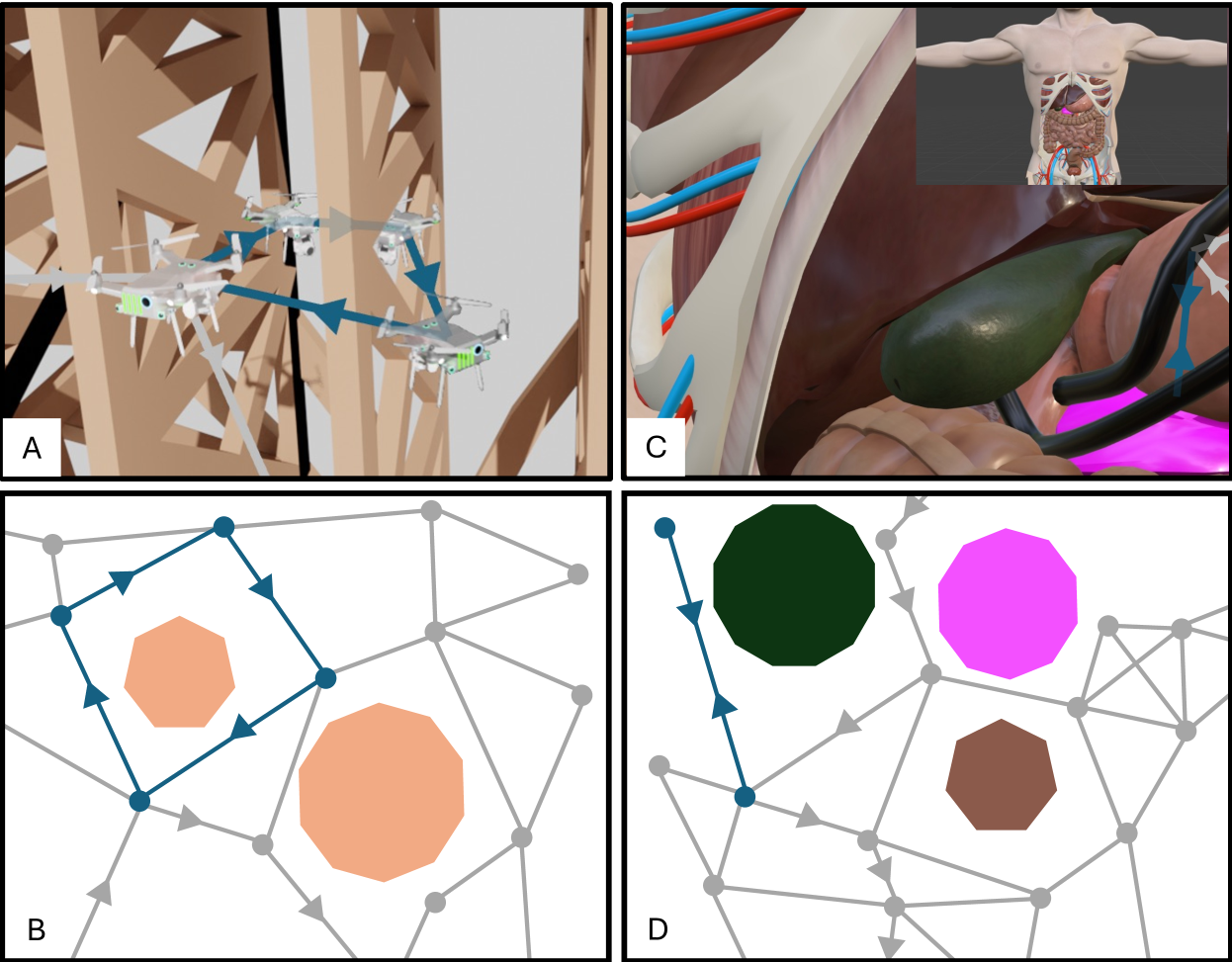
Leveraging Fixed-Parameter Tractability for Robot Inspection Planning
Yosuke Mizutani, Daniel Coimbra Salomao, Alex Crane, Matthias Bentert, P{aa}l Gr{o}n{aa}s Drange, Felix Reidl, Alan Kuntz, Blair D. Sullivan
Autonomous robotic inspection, where a robot moves through its environment and inspects points of interest, has applications in industrial settings, structural health monitoring, and medicine. Planning the paths for a robot to safely and efficiently perform such an inspection is an extremely difficult algorithmic challenge. In this work we consider an abstraction of the inspection planning problem which we term Graph Inspection. We give two exact algorithms for this problem, using dynamic programming and integer linear programming. We analyze the performance of these methods, and present multiple approaches to achieve scalability. We demonstrate significant improvement both in path weight and inspection coverage over a state-of-the-art approach on two robotics tasks in simulation, a bridge inspection task by a UAV and a surgical inspection task using a medical robot.
Read more7/2/2024

0
Reinforcement Learning Approach to Optimizing Profilometric Sensor Trajectories for Surface Inspection
Sara Roos-Hoefgeest, Mario Roos-Hoefgeest, Ignacio Alvarez, Rafael C. Gonz'alez
High-precision surface defect detection in manufacturing is essential for ensuring quality control. Laser triangulation profilometric sensors are key to this process, providing detailed and accurate surface measurements over a line. To achieve a complete and precise surface scan, accurate relative motion between the sensor and the workpiece is required. It is crucial to control the sensor pose to maintain optimal distance and relative orientation to the surface. It is also important to ensure uniform profile distribution throughout the scanning process. This paper presents a novel Reinforcement Learning (RL) based approach to optimize robot inspection trajectories for profilometric sensors. Building upon the Boustrophedon scanning method, our technique dynamically adjusts the sensor position and tilt to maintain optimal orientation and distance from the surface, while also ensuring a consistent profile distance for uniform and high-quality scanning. Utilizing a simulated environment based on the CAD model of the part, we replicate real-world scanning conditions, including sensor noise and surface irregularities. This simulation-based approach enables offline trajectory planning based on CAD models. Key contributions include the modeling of the state space, action space, and reward function, specifically designed for inspection applications using profilometric sensors. We use Proximal Policy Optimization (PPO) algorithm to efficiently train the RL agent, demonstrating its capability to optimize inspection trajectories with profilometric sensors. To validate our approach, we conducted several experiments where a model trained on a specific training piece was tested on various parts in simulation. Also, we conducted a real-world experiment by executing the optimized trajectory, generated offline from a CAD model, to inspect a part using a UR3e robotic arm model.
Read more9/6/2024

0
A Quantum Computing Approach for Multi-robot Coverage Path Planning
Poojith U Rao, Florian Speelman, Balwinder Sodhi, Sachin Kinge
This paper tackles the multi-vehicle Coverage Path Planning (CPP) problem, crucial for applications like search and rescue or environmental monitoring. Due to its NP-hard nature, finding optimal solutions becomes infeasible with larger problem sizes. This motivates the development of heuristic approaches that enhance efficiency even marginally. We propose a novel approach for exploring paths in a 2D grid, specifically designed for easy integration with the Quantum Alternating Operator Ansatz (QAOA), a powerful quantum heuristic. Our contribution includes: 1) An objective function tailored to solve the multi-vehicle CPP using QAOA. 2) Theoretical proofs guaranteeing the validity of the proposed approach. 3) Efficient construction of QAOA operators for practical implementation. 4) Resource estimation to assess the feasibility of QAOA execution. 5) Performance comparison against established algorithms like the Depth First Search. This work paves the way for leveraging quantum computing in optimizing multi-vehicle path planning, potentially leading to real-world advancements in various applications.
Read more7/15/2024