Vision-based robot manipulation of transparent liquid containers in a laboratory setting

0
💬
Sign in to get full access
Overview
- Researchers develop a flexible and cost-effective system for liquid volume estimation and pouring in small containers, which can be used to automate cell culture processes.
- The system includes a vision-based liquid volume estimation component and a simulation-driven pouring method designed for containers with small openings.
- The researchers evaluate the individual components and then demonstrate the integrated system using a UR5 robotic arm for cell culture automation.
- The code and a new dataset called LabLiquidVolume are publicly available for reproducibility.
Plain English Explanation
Performing laboratory processes that involve small volumes of solutions and active ingredients can be challenging to automate. Challenges include high initial costs, complex environments, and variability in experimental protocols. To address this, the researchers have developed a flexible and cost-effective system that uses computer vision and simulation to estimate liquid volumes and pour liquids into small containers.
The system has two main components. The first is a vision-based liquid volume estimation system that can accurately measure the amount of liquid in a container. The second is a simulation-driven pouring method that is designed specifically for containers with small openings, which can be difficult to pour into accurately.
The researchers evaluated each component individually and then integrated them into a complete system using a robotic arm to automate cell culture processes. They have made the code for the system and a new dataset called LabLiquidVolume publicly available, so that others can reproduce and build upon their work.
Overall, this research provides a practical solution to the challenge of automating laboratory processes involving small liquid volumes, which could help streamline and improve the efficiency of many scientific experiments and procedures.
Technical Explanation
The researchers developed a flexible and cost-effective approach to address the challenges of automating laboratory processes involving small liquid volumes. They introduced a vision-based system for liquid volume estimation and a simulation-driven pouring method designed for containers with small openings.
The vision-based liquid volume estimation component uses computer vision techniques to accurately measure the amount of liquid in a container. This is particularly useful for small volumes, where traditional measurement methods can be unreliable.
The simulation-driven pouring method leverages physical simulation to model the dynamics of liquid flow and ensure accurate pouring into containers with small openings. This helps overcome the challenges of manually pouring small amounts of liquids.
The researchers evaluated the individual components and then integrated them into a complete system, demonstrating its use for cell culture automation with a UR5 robotic arm. This showcases the practical applicability of their approach.
To ensure reproducibility, the researchers have shared their code and a newly introduced dataset called LabLiquidVolume, which can be accessed at the provided links. This allows other researchers and developers to build upon their work and further enhance robot explanation capabilities.
Critical Analysis
The researchers have addressed an important challenge in laboratory automation by developing a flexible and cost-effective system for liquid volume estimation and pouring in small containers. Their approach, which combines computer vision and physical simulation, shows promise in addressing the limitations of manual processes and traditional automation methods.
One potential limitation of the research is the specific focus on containers with small openings. While this is a common challenge in many laboratory settings, the applicability of the system may be somewhat limited to certain experimental setups or protocols. It would be interesting to see how the researchers' approach could be adapted or extended to handle a wider range of container sizes and shapes.
Additionally, the researchers mention the semi-structured environments and protocol variability as challenges in laboratory automation. While their system seems to address these to some extent, it would be valuable to further explore the robustness and adaptability of the system to different experimental setups and changes in protocols.
Overall, the researchers have made a valuable contribution to the field of laboratory automation, and their work presents an interesting avenue for further research and development in this area.
Conclusion
The researchers have developed a flexible and cost-effective system for automating laboratory processes involving small liquid volumes. Their approach, which combines computer vision-based liquid volume estimation and simulation-driven pouring, addresses the challenges of manual processes and traditional automation methods.
By making their code and a new dataset publicly available, the researchers have enabled others to reproduce and build upon their work, potentially leading to further advancements in laboratory automation. The successful integration of the system with a robotic arm for cell culture automation demonstrates the practical applicability of the researchers' approach.
This work has the potential to streamline and improve the efficiency of many scientific experiments and procedures, ultimately contributing to advancements in various fields of research.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
💬
0
Vision-based robot manipulation of transparent liquid containers in a laboratory setting
Daniel Schober, Ronja Guldenring, James Love, Lazaros Nalpantidis
Laboratory processes involving small volumes of solutions and active ingredients are often performed manually due to challenges in automation, such as high initial costs, semi-structured environments and protocol variability. In this work, we develop a flexible and cost-effective approach to address this gap by introducing a vision-based system for liquid volume estimation and a simulation-driven pouring method particularly designed for containers with small openings. We evaluate both components individually, followed by an applied real-world integration of cell culture automation using a UR5 robotic arm. Our work is fully reproducible: we share our code at at url{https://github.com/DaniSchober/LabLiquidVision} and the newly introduced dataset LabLiquidVolume is available at https://data.dtu.dk/articles/dataset/LabLiquidVision/25103102.
Read more4/26/2024
🏷️
0
RoboCAP: Robotic Classification and Precision Pouring of Diverse Liquids and Granular Media with Capacitive Sensing
Yexin Hu, Alexandra Gillespie, Akhil Padmanabha, Kavya Puthuveetil, Wesley Lewis, Karan Khokar, Zackory Erickson
Liquids and granular media are pervasive throughout human environments, yet remain particularly challenging for robots to sense and manipulate precisely. In this work, we present a systematic approach at integrating capacitive sensing within robotic end effectors to enable robust sensing and precise manipulation of liquids and granular media. We introduce the parallel-jaw RoboCAP Gripper with embedded capacitive sensing arrays that enable a robot to directly sense the materials and dynamics of liquids inside of diverse containers, including some visually opaque. When coupled with model-based control, we demonstrate that the proposed system enables a robotic manipulator to achieve state-of-the-art precision pouring accuracy for a range of substances with varying dynamics properties. Code, designs, and build details are available on the project website.
Read more5/14/2024
0
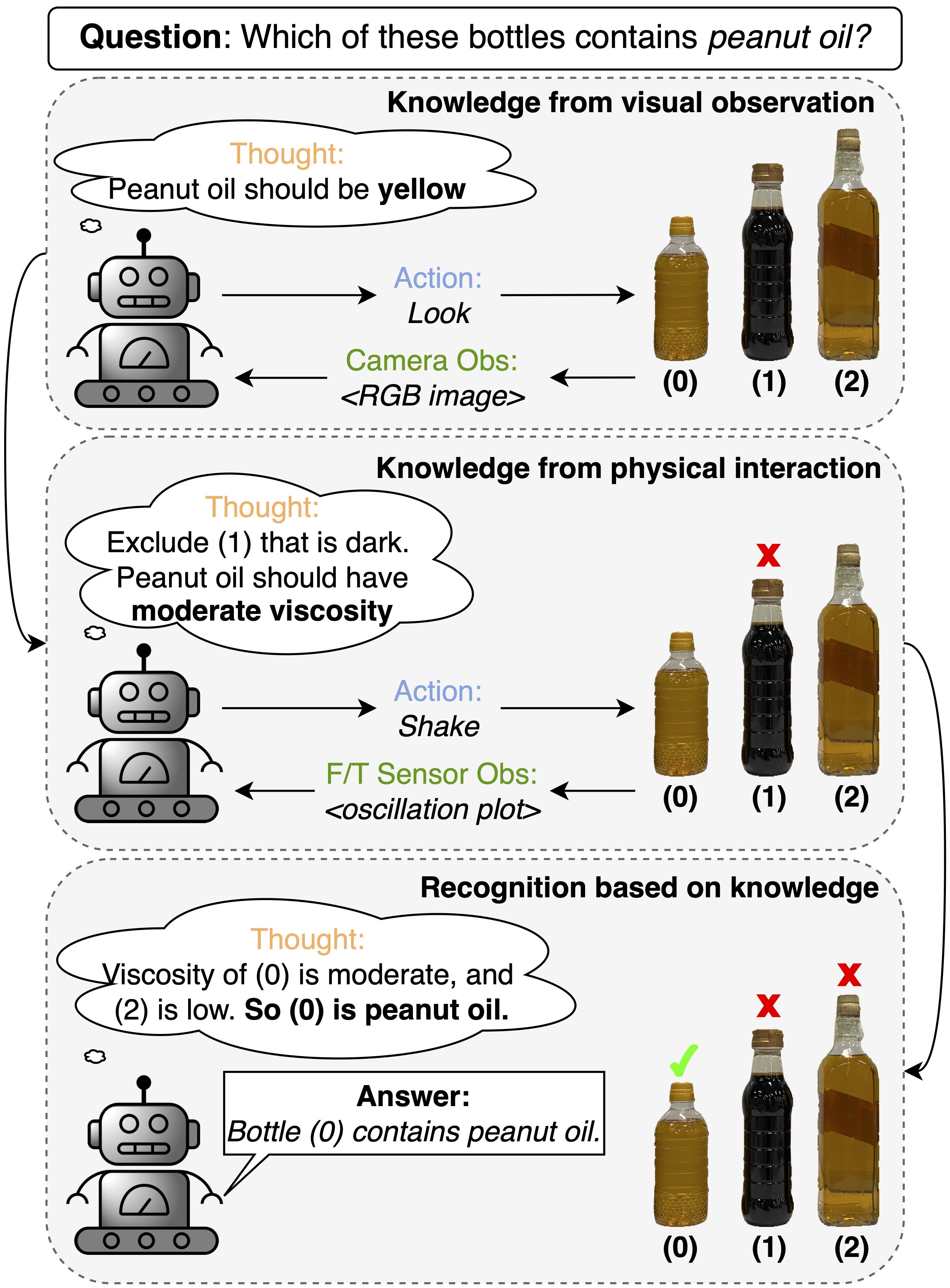
Vision-Language Model-based Physical Reasoning for Robot Liquid Perception
Wenqiang Lai, Yuan Gao, Tin Lun Lam
There is a growing interest in applying large language models (LLMs) in robotic tasks, due to their remarkable reasoning ability and extensive knowledge learned from vast training corpora. Grounding LLMs in the physical world remains an open challenge as they can only process textual input. Recent advancements in large vision-language models (LVLMs) have enabled a more comprehensive understanding of the physical world by incorporating visual input, which provides richer contextual information than language alone. In this work, we proposed a novel paradigm that leveraged GPT-4V(ision), the state-of-the-art LVLM by OpenAI, to enable embodied agents to perceive liquid objects via image-based environmental feedback. Specifically, we exploited the physical understanding of GPT-4V to interpret the visual representation (e.g., time-series plot) of non-visual feedback (e.g., F/T sensor data), indirectly enabling multimodal perception beyond vision and language using images as proxies. We evaluated our method using 10 common household liquids with containers of various geometry and material. Without any training or fine-tuning, we demonstrated that our method can enable the robot to indirectly perceive the physical response of liquids and estimate their viscosity. We also showed that by jointly reasoning over the visual and physical attributes learned through interactions, our method could recognize liquid objects in the absence of strong visual cues (e.g., container labels with legible text or symbols), increasing the accuracy from 69.0% -- achieved by the best-performing vision-only variant -- to 86.0%.
Read more4/11/2024

0
Online Robot Navigation and Manipulation with Distilled Vision-Language Models
Kangcheng Liu
Autonomous robot navigation within the dynamic unknown environment is of crucial significance for mobile robotic applications including robot navigation in last-mile delivery and robot-enabled automated supplies in industrial and hospital delivery applications. Current solutions still suffer from limitations, such as the robot cannot recognize unknown objects in real-time and cannot navigate freely in a dynamic, narrow, and complex environment. We propose a complete software framework for autonomous robot perception and navigation within very dense obstacles and dense human crowds. First, we propose a framework that accurately detects and segments open-world object categories in a zero-shot manner, which overcomes the over-segmentation limitation of the current SAM model. Second, we proposed the distillation strategy to distill the knowledge to segment the free space of the walkway for robot navigation without the label. In the meantime, we design the trimming strategy that works collaboratively with distillation to enable lightweight inference to deploy the neural network on edge devices such as NVIDIA-TX2 or Xavier NX during autonomous navigation. Integrated into the robot navigation system, extensive experiments demonstrate that our proposed framework has achieved superior performance in terms of both accuracy and efficiency in robot scene perception and autonomous robot navigation.
Read more5/14/2024