Voxel Mamba: Group-Free State Space Models for Point Cloud based 3D Object Detection

0

Sign in to get full access
Overview
- This paper introduces Voxel Mamba, a group-free state space model for 3D object detection using point cloud data.
- The key ideas include using state space models to capture the structure of point clouds, and a "group-free" approach that avoids the need for explicit object proposals or grouping.
- The model is designed to enhance local features and provide a simple, efficient way to model point cloud data for 3D object detection.
Plain English Explanation
Voxel Mamba: Group-Free State Space Models for Point Cloud based 3D Object Detection presents a new approach for detecting 3D objects from point cloud data. The core idea is to use a state space model, which is a type of mathematical model that can capture the underlying structure and dynamics of a system.
In this case, the "system" is the 3D point cloud data representing the objects in a scene. The state space model allows the algorithm to efficiently learn and represent the key features and relationships within the point cloud, without the need for explicit object proposals or grouping steps that are common in many 3D detection methods.
The Voxel Mamba model enhances local features in the point cloud data, which helps it better identify and localize individual objects. This multi-scale approach captures information at different resolutions to build a more robust and comprehensive understanding of the 3D scene.
The state space model used in Voxel Mamba is designed to be simple and efficient, allowing it to process point clouds in linear time without sacrificing accuracy. This makes it well-suited for real-world applications that require fast, reliable 3D object detection.
Technical Explanation
Voxel Mamba: Group-Free State Space Models for Point Cloud based 3D Object Detection proposes a novel approach for 3D object detection using point cloud data. The key innovation is the use of a state space model to capture the underlying structure and dynamics of the point cloud, without the need for explicit object proposals or grouping steps.
The Voxel Mamba model first encodes the point cloud into a compact voxel representation, which preserves local spatial information. It then uses a multi-scale hierarchical state space model to learn features and relationships at different resolutions.
The state space model used in Voxel Mamba is designed to be simple and efficient, allowing it to process point clouds in linear time without sacrificing accuracy. This is achieved through a "group-free" approach that avoids the need for costly object proposals or grouping steps.
The authors evaluate Voxel Mamba on several standard 3D object detection benchmarks, and demonstrate that it outperforms state-of-the-art group-based methods in terms of both accuracy and inference speed.
Critical Analysis
The Voxel Mamba paper presents a promising approach for 3D object detection that addresses some key limitations of existing methods. The use of a state space model to capture the structure of point clouds is a novel and theoretically well-grounded idea, and the "group-free" design helps to make the system more efficient and scalable.
However, the paper does not explore the potential limitations or failure modes of the state space model approach. It would be valuable to understand how the model behaves in the presence of occlusions, sparse point clouds, or other challenging real-world scenarios. Additionally, the paper does not provide a detailed analysis of the model's interpretability or explainability, which could be an important consideration for some applications.
Further research could also investigate the generalizability of the Voxel Mamba approach to other 3D perception tasks beyond object detection, such as semantic segmentation or instance segmentation. Exploring ways to make the model more robust and adaptable to diverse datasets and environments could also be a fruitful area of inquiry.
Conclusion
Voxel Mamba: Group-Free State Space Models for Point Cloud based 3D Object Detection presents a novel approach for 3D object detection that uses a state space model to efficiently capture the structure and dynamics of point cloud data. By avoiding the need for explicit object proposals or grouping, the Voxel Mamba model achieves state-of-the-art performance while running in linear time.
The multi-scale, hierarchical state space model and selective state processing techniques used in Voxel Mamba demonstrate the power of simple, efficient state space models for 3D perception tasks. This work opens up new avenues for developing fast, accurate, and interpretable 3D object detection systems that can be deployed in real-world applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Voxel Mamba: Group-Free State Space Models for Point Cloud based 3D Object Detection
Guowen Zhang, Lue Fan, Chenhang He, Zhen Lei, Zhaoxiang Zhang, Lei Zhang
Serialization-based methods, which serialize the 3D voxels and group them into multiple sequences before inputting to Transformers, have demonstrated their effectiveness in 3D object detection. However, serializing 3D voxels into 1D sequences will inevitably sacrifice the voxel spatial proximity. Such an issue is hard to be addressed by enlarging the group size with existing serialization-based methods due to the quadratic complexity of Transformers with feature sizes. Inspired by the recent advances of state space models (SSMs), we present a Voxel SSM, termed as Voxel Mamba, which employs a group-free strategy to serialize the whole space of voxels into a single sequence. The linear complexity of SSMs encourages our group-free design, alleviating the loss of spatial proximity of voxels. To further enhance the spatial proximity, we propose a Dual-scale SSM Block to establish a hierarchical structure, enabling a larger receptive field in the 1D serialization curve, as well as more complete local regions in 3D space. Moreover, we implicitly apply window partition under the group-free framework by positional encoding, which further enhances spatial proximity by encoding voxel positional information. Our experiments on Waymo Open Dataset and nuScenes dataset show that Voxel Mamba not only achieves higher accuracy than state-of-the-art methods, but also demonstrates significant advantages in computational efficiency.
Read more6/19/2024
0
GroupMamba: Parameter-Efficient and Accurate Group Visual State Space Model
Abdelrahman Shaker, Syed Talal Wasim, Salman Khan, Juergen Gall, Fahad Shahbaz Khan
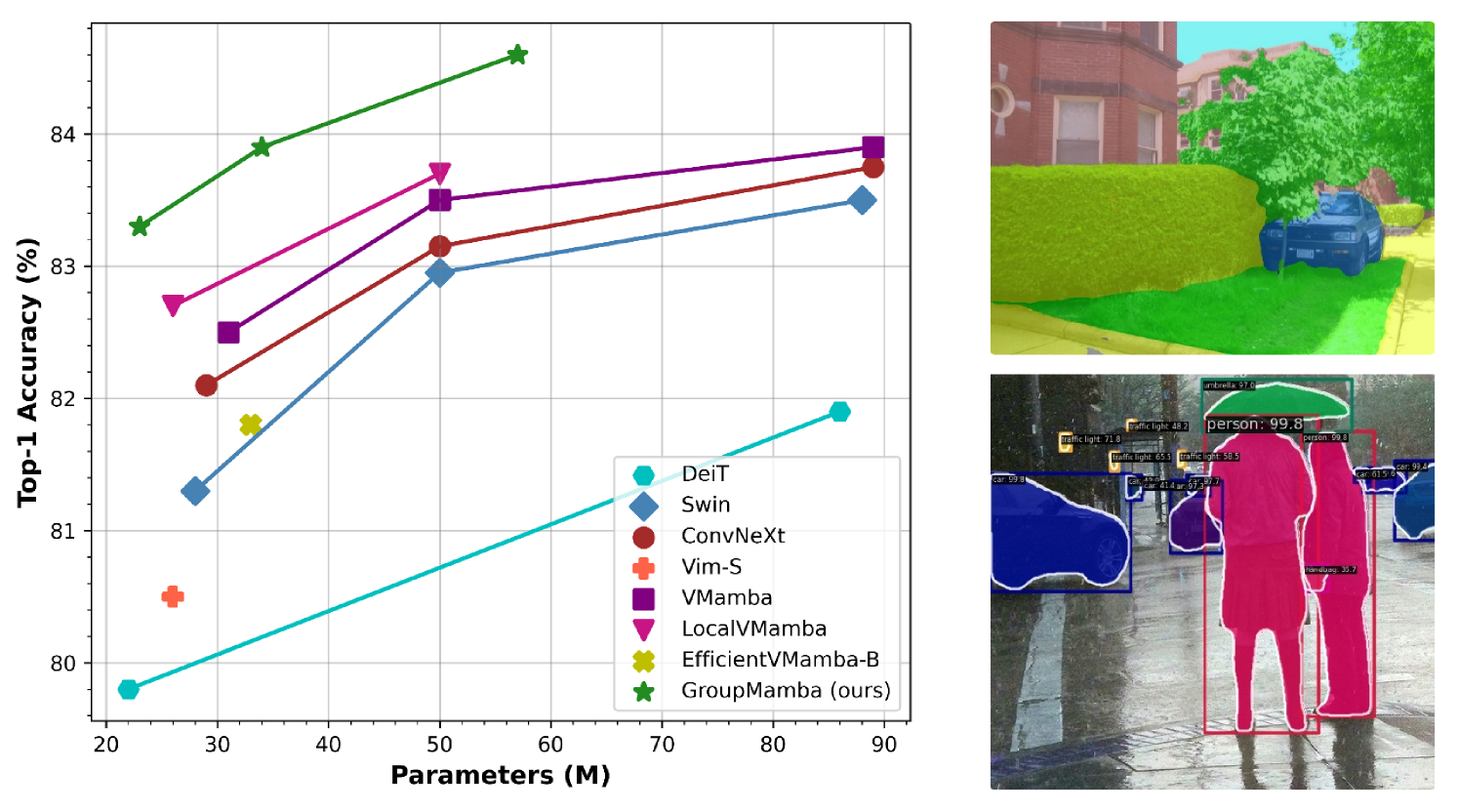
Recent advancements in state-space models (SSMs) have showcased effective performance in modeling long-range dependencies with subquadratic complexity. However, pure SSM-based models still face challenges related to stability and achieving optimal performance on computer vision tasks. Our paper addresses the challenges of scaling SSM-based models for computer vision, particularly the instability and inefficiency of large model sizes. To address this, we introduce a Modulated Group Mamba layer which divides the input channels into four groups and applies our proposed SSM-based efficient Visual Single Selective Scanning (VSSS) block independently to each group, with each VSSS block scanning in one of the four spatial directions. The Modulated Group Mamba layer also wraps the four VSSS blocks into a channel modulation operator to improve cross-channel communication. Furthermore, we introduce a distillation-based training objective to stabilize the training of large models, leading to consistent performance gains. Our comprehensive experiments demonstrate the merits of the proposed contributions, leading to superior performance over existing methods for image classification on ImageNet-1K, object detection, instance segmentation on MS-COCO, and semantic segmentation on ADE20K. Our tiny variant with 23M parameters achieves state-of-the-art performance with a classification top-1 accuracy of 83.3% on ImageNet-1K, while being 26% efficient in terms of parameters, compared to the best existing Mamba design of same model size. Our code and models are available at: https://github.com/Amshaker/GroupMamba.
Read more7/19/2024
📈
0
Mamba3D: Enhancing Local Features for 3D Point Cloud Analysis via State Space Model
Xu Han, Yuan Tang, Zhaoxuan Wang, Xianzhi Li
Existing Transformer-based models for point cloud analysis suffer from quadratic complexity, leading to compromised point cloud resolution and information loss. In contrast, the newly proposed Mamba model, based on state space models (SSM), outperforms Transformer in multiple areas with only linear complexity. However, the straightforward adoption of Mamba does not achieve satisfactory performance on point cloud tasks. In this work, we present Mamba3D, a state space model tailored for point cloud learning to enhance local feature extraction, achieving superior performance, high efficiency, and scalability potential. Specifically, we propose a simple yet effective Local Norm Pooling (LNP) block to extract local geometric features. Additionally, to obtain better global features, we introduce a bidirectional SSM (bi-SSM) with both a token forward SSM and a novel backward SSM that operates on the feature channel. Extensive experimental results show that Mamba3D surpasses Transformer-based counterparts and concurrent works in multiple tasks, with or without pre-training. Notably, Mamba3D achieves multiple SoTA, including an overall accuracy of 92.6% (train from scratch) on the ScanObjectNN and 95.1% (with single-modal pre-training) on the ModelNet40 classification task, with only linear complexity. Our code and weights are available at https://github.com/xhanxu/Mamba3D.
Read more9/4/2024

0
Point Cloud Mamba: Point Cloud Learning via State Space Model
Tao Zhang, Xiangtai Li, Haobo Yuan, Shunping Ji, Shuicheng Yan
Recently, state space models have exhibited strong global modeling capabilities and linear computational complexity in contrast to transformers. This research focuses on applying such architecture in point cloud analysis. In particular, for the first time, we demonstrate that Mamba-based point cloud methods can outperform previous methods based on transformer or multi-layer perceptrons (MLPs). To enable Mamba to process 3-D point cloud data more effectively, we propose a novel Consistent Traverse Serialization method to convert point clouds into 1-D point sequences while ensuring that neighboring points in the sequence are also spatially adjacent. Consistent Traverse Serialization yields six variants by permuting the order of x, y, and z coordinates, and the synergistic use of these variants aids Mamba in comprehensively observing point cloud data. Furthermore, to assist Mamba in handling point sequences with different orders more effectively, we introduce point prompts to inform Mamba of the sequence's arrangement rules. Finally, we propose positional encoding based on spatial coordinate mapping to inject positional information into point cloud sequences better. Point Cloud Mamba surpasses the state-of-the-art (SOTA) point-based method PointNeXt and achieves new SOTA performance on the ScanObjectNN, ModelNet40, ShapeNetPart, and S3DIS datasets. It is worth mentioning that when using a more powerful local feature extraction module, our PCM achieves 82.6 mIoU on S3DIS, significantly surpassing the previous SOTA models, DeLA and PTv3, by 8.5 mIoU and 7.9 mIoU, respectively. Code and model are available at https://github.com/SkyworkAI/PointCloudMamba.
Read more5/31/2024