What Matters in Range View 3D Object Detection

0
Sign in to get full access
Overview
- This paper explores the key factors that influence the performance of 3D object detection using range view data from LiDAR sensors.
- The researchers conduct a comprehensive study to understand how different design choices and input data characteristics impact the accuracy and robustness of range-based 3D object detectors.
- The insights from this work can guide the development of more effective 3D perception systems for autonomous vehicles and other applications.
Plain English Explanation
3D object detection is a crucial capability for autonomous vehicles, allowing them to identify and track objects around them in the real world. One popular approach is to use data from LiDAR sensors, which measure the distance to objects by emitting and detecting laser pulses.
The researchers in this paper wanted to understand what factors are most important for achieving high performance in 3D object detection using this "range view" data from LiDAR. They systematically examined different design choices for the neural networks used for detection, as well as the characteristics of the input data itself.
For example, they looked at how the resolution and coverage of the LiDAR sensor affected the results, as well as the impact of data augmentation techniques to improve robustness. The researchers also analyzed the relative importance of different input features, like the intensity of the LiDAR returns.
By conducting this comprehensive study, the researchers were able to identify the key elements that matter most for accurate 3D object detection from range view data. This knowledge can help guide the development of more effective perception systems for self-driving cars and other applications that rely on 3D scene understanding.
Technical Explanation
The paper begins by reviewing prior work on 3D object detection, including both range-based approaches using LiDAR and other sensor modalities like cameras. The authors note that range view-based methods have advantages in terms of their robustness to lighting and weather conditions.
To understand the factors that influence the performance of range view 3D object detectors, the researchers conducted an extensive series of experiments. They used a state-of-the-art range view detector as the backbone and systematically varied different design choices, such as network architecture, input representations, and data augmentation techniques.
The experiments were carried out on the nuScenes dataset, a large-scale autonomous driving benchmark. The researchers analyzed the impact of LiDAR resolution, coverage, and sensor position, as well as the utility of different input features like intensity and height. They also explored the benefits of advanced data augmentation methods like point cloud jittering and flipping.
Through this comprehensive analysis, the authors were able to identify the most critical factors for range view 3D object detection performance. For example, they found that high-resolution LiDAR data and features like intensity were particularly important, while the optimal sensor position depended on the specific application. The data augmentation techniques were also shown to significantly improve robustness.
The insights from this work can inform the design of more effective 3D perception systems for autonomous vehicles and other real-world applications that rely on LiDAR sensors. The researchers provide clear guidelines on the key considerations for developing range view-based 3D object detectors.
Critical Analysis
The paper provides a thorough and systematic analysis of the factors that influence the performance of range view-based 3D object detection. The experimental design is rigorous, and the researchers make a concerted effort to isolate the impact of individual design choices.
One potential limitation is that the study is primarily focused on the nuScenes dataset, which may not fully capture the diversity of real-world driving scenarios. It would be valuable to see the generalization of these findings to other datasets and environments.
Additionally, while the paper explores a wide range of design choices, there may be other architectural innovations or input representations that could further improve performance. The authors acknowledge this, noting that their analysis is not exhaustive.
It would also be interesting to see a more in-depth investigation of the interplay between different factors, as some of the effects may be interdependent. For example, the optimal sensor position could depend on the LiDAR resolution and coverage.
Despite these minor caveats, the insights provided in this paper are highly valuable for researchers and engineers working on 3D perception systems for autonomous vehicles and other applications. The clear guidelines and design principles can help accelerate the development of more robust and accurate 3D object detectors.
Conclusion
This comprehensive study on range view 3D object detection offers valuable insights that can guide the development of more effective perception systems for autonomous vehicles and other real-world applications. The researchers have identified the key factors that influence performance, including LiDAR resolution, coverage, sensor position, and the importance of input features like intensity.
By systematically exploring the design space, the authors have provided a clear set of guidelines for optimizing range view-based 3D object detectors. These findings can help researchers and engineers build more accurate and robust 3D perception systems, which is crucial for the safe and reliable deployment of autonomous vehicles and other intelligent systems.
While the study is primarily focused on the nuScenes dataset, the general principles and insights are likely to be applicable across a wider range of scenarios and environments. Future work could further explore the generalization of these findings and investigate more advanced architectural and input representation innovations.
Overall, this paper represents an important contribution to the field of 3D object detection, offering a deep understanding of the factors that matter most for range view-based approaches. The implications of this research can help drive progress towards more capable and trustworthy autonomous systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
What Matters in Range View 3D Object Detection
Benjamin Wilson, Nicholas Autio Mitchell, Jhony Kaesemodel Pontes, James Hays
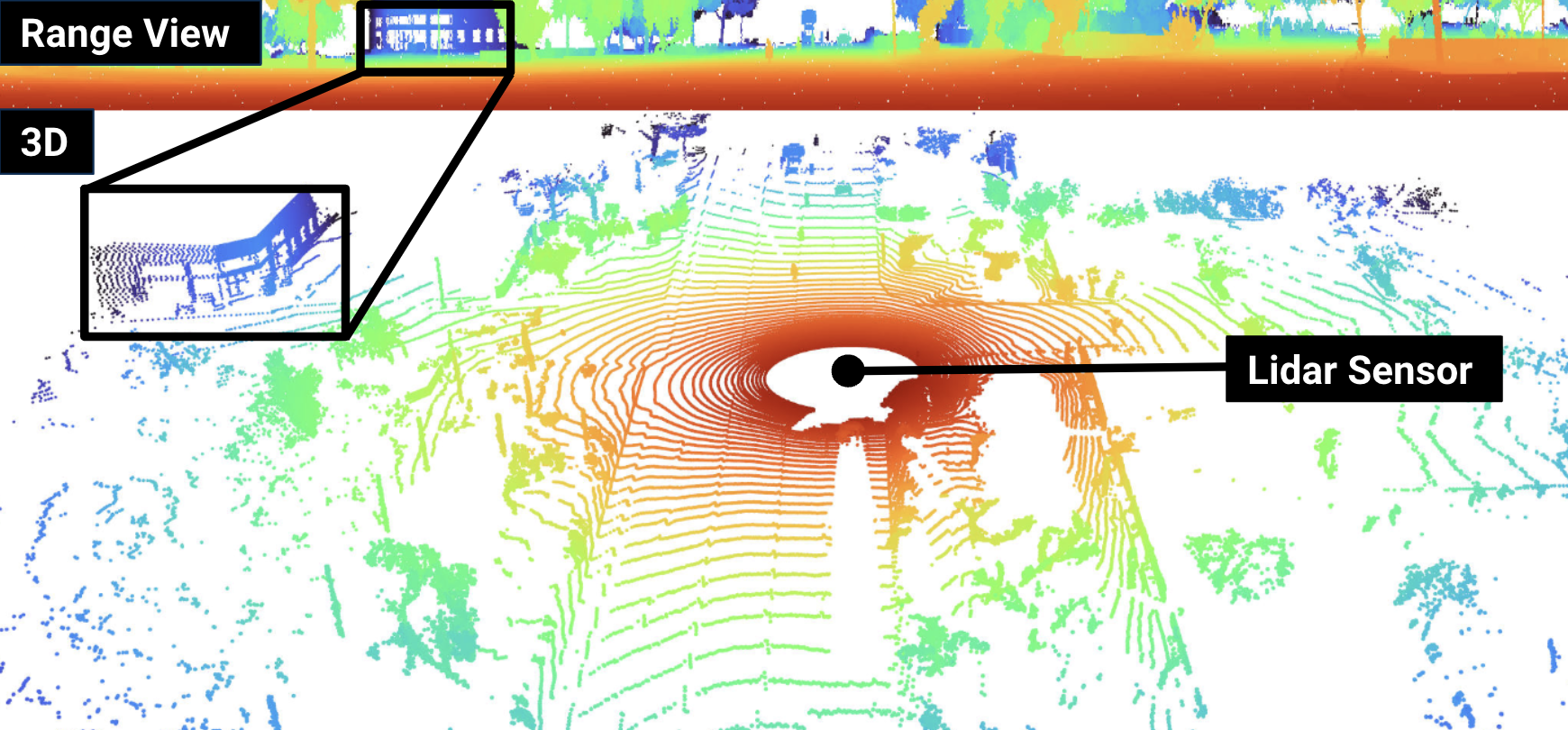
Lidar-based perception pipelines rely on 3D object detection models to interpret complex scenes. While multiple representations for lidar exist, the range-view is enticing since it losslessly encodes the entire lidar sensor output. In this work, we achieve state-of-the-art amongst range-view 3D object detection models without using multiple techniques proposed in past range-view literature. We explore range-view 3D object detection across two modern datasets with substantially different properties: Argoverse 2 and Waymo Open. Our investigation reveals key insights: (1) input feature dimensionality significantly influences the overall performance, (2) surprisingly, employing a classification loss grounded in 3D spatial proximity works as well or better compared to more elaborate IoU-based losses, and (3) addressing non-uniform lidar density via a straightforward range subsampling technique outperforms existing multi-resolution, range-conditioned networks. Our experiments reveal that techniques proposed in recent range-view literature are not needed to achieve state-of-the-art performance. Combining the above findings, we establish a new state-of-the-art model for range-view 3D object detection -- improving AP by 2.2% on the Waymo Open dataset while maintaining a runtime of 10 Hz. We establish the first range-view model on the Argoverse 2 dataset and outperform strong voxel-based baselines. All models are multi-class and open-source. Code is available at https://github.com/benjaminrwilson/range-view-3d-detection.
Read more7/29/2024

0
Uplifting Range-View-based 3D Semantic Segmentation in Real-Time with Multi-Sensor Fusion
Shiqi Tan, Hamidreza Fazlali, Yixuan Xu, Yuan Ren, Bingbing Liu
Range-View(RV)-based 3D point cloud segmentation is widely adopted due to its compact data form. However, RV-based methods fall short in providing robust segmentation for the occluded points and suffer from distortion of projected RGB images due to the sparse nature of 3D point clouds. To alleviate these problems, we propose a new LiDAR and Camera Range-view-based 3D point cloud semantic segmentation method (LaCRange). Specifically, a distortion-compensating knowledge distillation (DCKD) strategy is designed to remedy the adverse effect of RV projection of RGB images. Moreover, a context-based feature fusion module is introduced for robust and preservative sensor fusion. Finally, in order to address the limited resolution of RV and its insufficiency of 3D topology, a new point refinement scheme is devised for proper aggregation of features in 2D and augmentation of point features in 3D. We evaluated the proposed method on large-scale autonomous driving datasets ie SemanticKITTI and nuScenes. In addition to being real-time, the proposed method achieves state-of-the-art results on nuScenes benchmark
Read more7/16/2024
🔎
0
Towards Long-Range 3D Object Detection for Autonomous Vehicles
Ajinkya Khoche, Laura Pereira S'anchez, Nazre Batool, Sina Sharif Mansouri, Patric Jensfelt
3D object detection at long range is crucial for ensuring the safety and efficiency of self driving vehicles, allowing them to accurately perceive and react to objects, obstacles, and potential hazards from a distance. But most current state of the art LiDAR based methods are range limited due to sparsity at long range, which generates a form of domain gap between points closer to and farther away from the ego vehicle. Another related problem is the label imbalance for faraway objects, which inhibits the performance of Deep Neural Networks at long range. To address the above limitations, we investigate two ways to improve long range performance of current LiDAR based 3D detectors. First, we combine two 3D detection networks, referred to as range experts, one specializing at near to mid range objects, and one at long range 3D detection. To train a detector at long range under a scarce label regime, we further weigh the loss according to the labelled point's distance from ego vehicle. Second, we augment LiDAR scans with virtual points generated using Multimodal Virtual Points (MVP), a readily available image-based depth completion algorithm. Our experiments on the long range Argoverse2 (AV2) dataset indicate that MVP is more effective in improving long range performance, while maintaining a straightforward implementation. On the other hand, the range experts offer a computationally efficient and simpler alternative, avoiding dependency on image-based segmentation networks and perfect camera-LiDAR calibration.
Read more5/22/2024
🤿
0
Deep Models for Multi-View 3D Object Recognition: A Review
Mona Alzahrani, Muhammad Usman, Salma Kammoun, Saeed Anwar, Tarek Helmy
Human decision-making often relies on visual information from multiple perspectives or views. In contrast, machine learning-based object recognition utilizes information from a single image of the object. However, the information conveyed by a single image may not be sufficient for accurate decision-making, particularly in complex recognition problems. The utilization of multi-view 3D representations for object recognition has thus far demonstrated the most promising results for achieving state-of-the-art performance. This review paper comprehensively covers recent progress in multi-view 3D object recognition methods for 3D classification and retrieval tasks. Specifically, we focus on deep learning-based and transformer-based techniques, as they are widely utilized and have achieved state-of-the-art performance. We provide detailed information about existing deep learning-based and transformer-based multi-view 3D object recognition models, including the most commonly used 3D datasets, camera configurations and number of views, view selection strategies, pre-trained CNN architectures, fusion strategies, and recognition performance on 3D classification and 3D retrieval tasks. Additionally, we examine various computer vision applications that use multi-view classification. Finally, we highlight key findings and future directions for developing multi-view 3D object recognition methods to provide readers with a comprehensive understanding of the field.
Read more4/24/2024