X-ray Fluoroscopy Guided Localization and Steering of Medical Microrobots through Virtual Enhancement

0
🌐
Sign in to get full access
Overview
- Developing safe and effective medical microrobots requires robust detection, tracking, and localization methods within the body
- The human body's non-transparency poses a challenge, limiting detection primarily to specialized imaging systems like X-ray fluoroscopy
- This study explores creating a simulation environment with a digital replica (virtual twin) of the microrobot's operational workspace to address this challenge
Plain English Explanation
The researchers are working on developing tiny robots, called microrobots, to be used for medical treatments inside the human body. For these microrobots to be effective and safe, it's important to be able to accurately detect, track, and locate them as they move around inside the body.
However, the human body is not very transparent, which makes it difficult to see where the microrobots are. The main way to detect them is by using specialized imaging systems like X-ray machines, but these don't always provide a clear picture of the robot's exact location.
To solve this problem, the researchers created a virtual, digital replica or "twin" of the area where the microrobot is operating. By syncing this virtual model with the real-time information from the imaging system, the researchers were able to track and steer the microrobot with high accuracy and speed, even in confined spaces.
This approach could help reduce the amount of X-ray exposure that patients need during microrobot procedures, while still allowing doctors to precisely control the robot's movements. Overall, this research addresses an important challenge in using tiny medical robots, which could lead to better treatments for patients in the near future.
Technical Explanation
The researchers developed a simulation environment that contains a precise digital replica, or "virtual twin," of the operational workspace for a model microrobot. By continuously integrating the microrobot's position data from the image stream (such as X-ray fluoroscopy) into this virtual twin, the researchers were able to synchronize the coordinate systems between the virtual and real-world environments.
This allowed the microrobot operator, whether human or machine, to control the robot's navigation by working in the virtual world rather than relying solely on the limited visual feedback from the imaging systems. The researchers validated this concept by demonstrating the tracking and steering of a mobile magnetic robot within confined phantoms (simulated body parts) with high temporal resolution (less than 100 milliseconds, with an average of around 20 milliseconds) visual feedback.
Importantly, the researchers' object detection-based localization approach offers the potential to reduce overall patient exposure to X-ray doses during continuous microrobot tracking, without compromising tracking accuracy. This addresses a critical gap in developing image-guided remote interventions with untethered medical microrobots, which is an important step towards future applications in animal models and human patients.
Critical Analysis
The researchers acknowledge several limitations and areas for further research in their paper. For example, they note that the virtual twin approach may not be suitable for all types of microrobots or operational environments, and that additional validation is needed in more complex, heterogeneous tissue-like phantoms.
Additionally, the researchers highlight the need to integrate advanced haptic and tactile feedback mechanisms to provide the microrobot operator with a more comprehensive sense of the robot's interactions within the body.
While the researchers' approach shows promise, further work is needed to fully optimize the system and address any potential safety concerns that may arise when deploying these microrobots in a clinical setting.
Conclusion
This research presents a novel approach to addressing the challenge of accurately detecting, tracking, and controlling the movement of medical microrobots within the human body. By creating a virtual twin of the microrobot's operational workspace and integrating real-time position data, the researchers have demonstrated a way to overcome the limitations of current imaging technologies.
This work represents an important step towards the development of safer and more effective image-guided remote interventions using untethered medical microrobots. As the field of medical robotics continues to advance, this type of innovative approach could significantly improve patient outcomes and pave the way for new, minimally invasive treatment options.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🌐
0
X-ray Fluoroscopy Guided Localization and Steering of Medical Microrobots through Virtual Enhancement
Husnu Halid Alabay, Tuan-Anh Le, Hakan Ceylan
In developing medical interventions using untethered milli- and microrobots, ensuring safety and effectiveness relies on robust methods for detection, real-time tracking, and precise localization within the body. However, the inherent non-transparency of the human body poses a significant obstacle, limiting robot detection primarily to specialized imaging systems such as X-ray fluoroscopy, which often lack crucial anatomical details. Consequently, the robot operator (human or machine) would encounter severe challenges in accurately determining the location of the robot and steering its motion. This study explores the feasibility of circumventing this challenge by creating a simulation environment that contains the precise digital replica (virtual twin) of a model microrobot operational workspace. Synchronizing coordinate systems between the virtual and real worlds and continuously integrating microrobot position data from the image stream into the virtual twin allows the microrobot operator to control navigation in the virtual world. We validate this concept by demonstrating the tracking and steering of a mobile magnetic robot in confined phantoms with high temporal resolution (< 100 ms, with an average of ~20 ms) visual feedback. Additionally, our object detection-based localization approach offers the potential to reduce overall patient exposure to X-ray doses during continuous microrobot tracking without compromising tracking accuracy. Ultimately, we address a critical gap in developing image-guided remote interventions with untethered medical microrobots, particularly for near-future applications in animal models and human patients.
Read more9/16/2024
0
New!Online 4D Ultrasound-Guided Robotic Tracking Enables 3D Ultrasound Localisation Microscopy with Large Tissue Displacements
Jipeng Yan, Shusei Kawara, Qingyuan Tan, Jingwen Zhu, Bingxue Wang, Matthieu Toulemonde, Honghai Liu, Ying Tan, Meng-Xing Tang
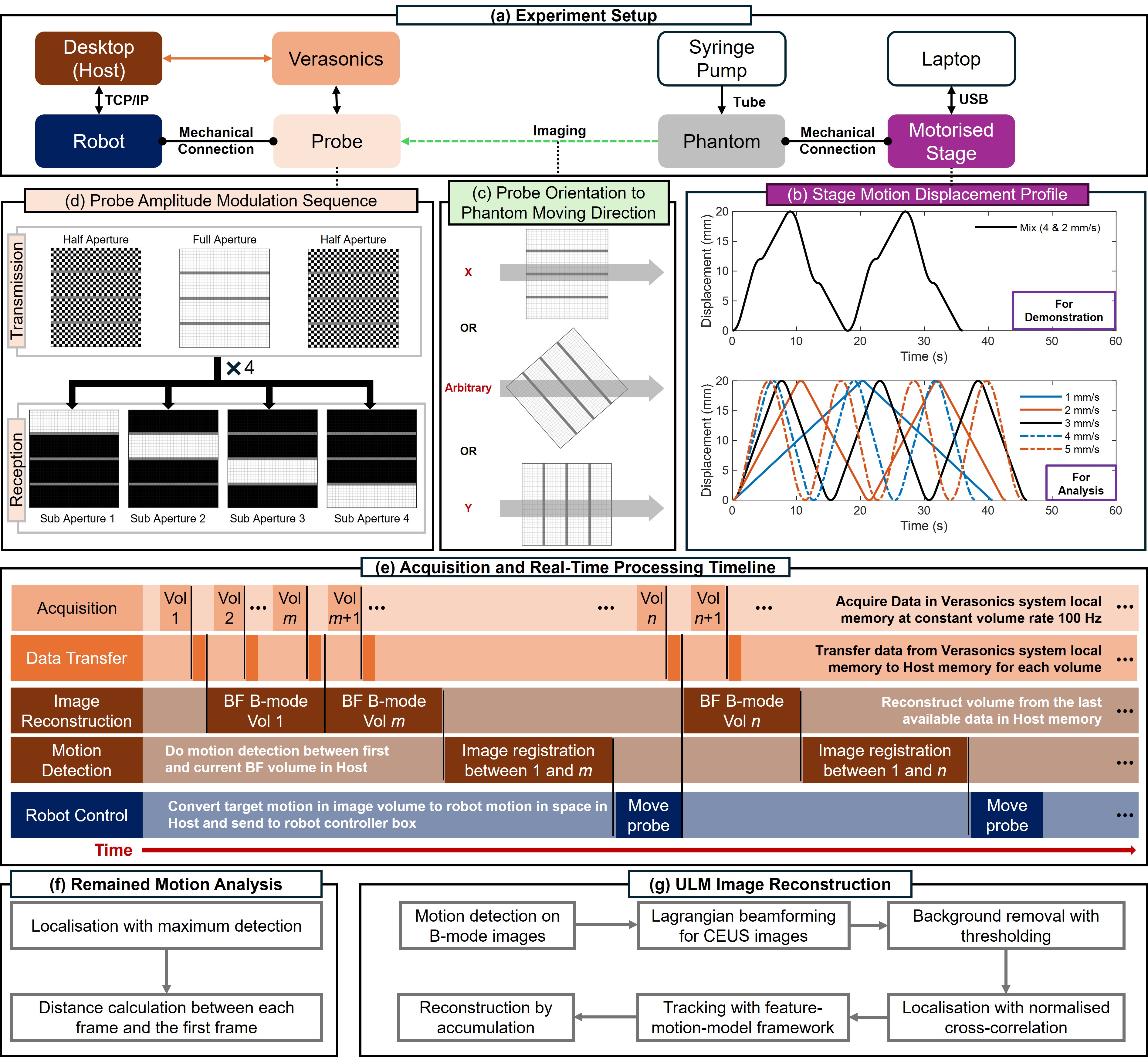
Super-Resolution Ultrasound (SRUS) imaging through localising and tracking microbubbles, also known as Ultrasound Localisation Microscopy (ULM), has demonstrated significant potential for reconstructing microvasculature and flows with sub-diffraction resolution in clinical diagnostics. However, imaging organs with large tissue movements, such as those caused by respiration, presents substantial challenges. Existing methods often require breath holding to maintain accumulation accuracy, which limits data acquisition time and ULM image saturation. To improve image quality in the presence of large tissue movements, this study introduces an approach integrating high-frame-rate ultrasound with online precise robotic probe control. Tested on a microvasculature phantom with translation motions up to 20 mm, twice the aperture size of the matrix array used, our method achieved real-time tracking of the moving phantom and imaging volume rate at 85 Hz, keeping majority of the target volume in the imaging field of view. ULM images of the moving cross channels in the phantom were successfully reconstructed in post-processing, demonstrating the feasibility of super-resolution imaging under large tissue motions. This represents a significant step towards ULM imaging of organs with large motion.
Read more9/18/2024

0
Enhancing Precision in Tactile Internet-Enabled Remote Robotic Surgery: Kalman Filter Approach
Muhammad Hanif Lashari, Wafa Batayneh, Ashfaq Khokhar
Accurately estimating the position of a patient's side robotic arm in real time in a remote surgery task is a significant challenge, particularly in Tactile Internet (TI) environments. This paper presents a Kalman Filter (KF) based computationally efficient position estimation method. The study also assume no prior knowledge of the dynamic system model of the robotic arm system. Instead, The JIGSAW dataset, which is a comprehensive collection of robotic surgical data, and the Master Tool Manipulator's (MTM) input are utilized to learn the system model using System Identification (SI) toolkit available in Matlab. We further investigate the effectiveness of KF to determine the position of the Patient Side Manipulator (PSM) under simulated network conditions that include delays, jitter, and packet loss. These conditions reflect the typical challenges encountered in real-world Tactile Internet applications. The results of the study highlight KF's resilience and effectiveness in achieving accurate state estimation despite network-induced uncertainties with over 90% estimation accuracy.
Read more6/10/2024

0
A Patient-Specific Framework for Autonomous Spinal Fixation via a Steerable Drilling Robot
Susheela Sharma, Sarah Go, Zeynep Yakay, Yash Kulkarni, Siddhartha Kapuria, Jordan P. Amadio, Mohsen Khadem, Nassir Navab, Farshid Alambeigi
In this paper, with the goal of enhancing the minimally invasive spinal fixation procedure in osteoporotic patients, we propose a first-of-its-kind image-guided robotic framework for performing an autonomous and patient-specific procedure using a unique concentric tube steerable drilling robot (CT-SDR). Particularly, leveraging a CT-SDR, we introduce the concept of J-shape drilling based on a pre-operative trajectory planned in CT scan of a patient followed by appropriate calibration, registration, and navigation steps to safely execute this trajectory in real-time using our unique robotic setup. To thoroughly evaluate the performance of our framework, we performed several experiments on two different vertebral phantoms designed based on CT scan of real patients.
Read more7/9/2024