Data-driven imaging geometric recovery of ultrahigh resolution robotic micro-CT for in-vivo and other applications

0

Sign in to get full access
Overview
- This paper presents a data-driven approach for geometric recovery of ultrahigh-resolution images from a robotic micro-CT system.
- The method aims to improve the accuracy and reliability of in-vivo and other applications that require precise 3D imaging.
- Key techniques include deep learning-based geometric calibration, iterative reconstruction, and model-based optimization.
Plain English Explanation
The researchers have developed a new way to capture highly detailed 3D images using a specialized micro-CT scanner. Micro-CT scanners can take very high-resolution scans, but the images can sometimes be distorted or inaccurate due to small imperfections in the scanner hardware.
To address this, the team used machine learning techniques to automatically calibrate the scanner and correct for these geometric distortions. They trained a deep neural network to analyze the scan data and identify any systematic errors or imperfections. The network then learns how to mathematically adjust the images to compensate for these issues, resulting in much sharper and more accurate 3D reconstructions.
The researchers also incorporated iterative reconstruction algorithms and model-based optimization to further refine the image quality. This allows the system to progressively improve the scans over multiple processing steps, removing artifacts and noise while preserving important details.
Overall, this work makes it possible to obtain extremely high-resolution 3D images of biological samples, like small animals, with much greater precision than was previously possible using micro-CT technology. This advance could enable new discoveries and applications in fields like internal link: in-vivo biology, medical imaging, and structural biology.
Technical Explanation
The key innovation in this paper is the use of data-driven geometric calibration to improve the accuracy of a robotic micro-CT imaging system. The authors train a deep neural network to automatically analyze the raw scan data and identify any systematic geometric distortions or imperfections in the imaging hardware.
The network learns to construct a mathematical model that can compensate for these errors, allowing the subsequent 3D reconstruction to produce much sharper and more faithful images. This is combined with iterative reconstruction techniques that progressively refine the scans, and model-based optimization to further enhance the image quality.
Experiments on both synthetic and real-world datasets demonstrate the effectiveness of this approach. Compared to conventional micro-CT systems, the authors show significant improvements in metrics like spatial resolution, contrast, and signal-to-noise ratio. This enables new applications that require ultrahigh-resolution 3D imaging, such as in-vivo biology studies, high-precision medical imaging, and structural analysis of small biological samples.
Critical Analysis
The authors have provided a thorough technical evaluation of their data-driven geometric calibration approach, demonstrating its effectiveness on a variety of datasets. However, a few potential limitations or areas for further research are worth noting:
-
The deep learning model used for calibration was trained on synthetic data, which may not fully capture the complexities of real-world micro-CT systems. Additional experiments with more diverse training data could help improve the robustness of the approach.
-
While the iterative reconstruction and optimization techniques improve image quality, they also add significant computational complexity. The trade-offs between reconstruction time, memory usage, and final image fidelity could be explored in more depth.
-
The paper does not discuss the challenges of deploying this system in practical settings, such as the need for automated quality control, user-friendly interfaces, or integration with existing medical imaging workflows. Addressing these practical considerations could be an important next step.
-
The authors mention the potential for this method to enable new applications in fields like in-vivo biology and structural biology. However, they do not provide specific examples or use cases to illustrate the real-world impact of this technology.
Overall, this paper presents a sophisticated and promising approach for improving the accuracy and reliability of micro-CT imaging. With further refinement and practical deployment, the techniques described here could have a significant impact on a wide range of scientific and medical applications.
Conclusion
This research introduces a novel data-driven method for geometric calibration and reconstruction of ultrahigh-resolution images from a robotic micro-CT system. By leveraging deep learning, iterative processing, and model-based optimization, the authors demonstrate substantial improvements in image quality compared to conventional micro-CT approaches.
The ability to capture highly detailed 3D scans with greater precision opens up new possibilities for in-vivo studies, medical diagnostics, and structural analysis of small biological samples. While some practical challenges remain, this work represents an important step forward in advancing the capabilities of micro-CT imaging technology.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Data-driven imaging geometric recovery of ultrahigh resolution robotic micro-CT for in-vivo and other applications
Mengzhou Li, Guibin Zan, Wenbin Yun, Josef Uher, John Wen, Ge Wang
We introduce an ultrahigh-resolution (50mu m) robotic micro-CT design for localized imaging of carotid plaques using robotic arms, cutting-edge detector, and machine learning technologies. To combat geometric error-induced artifacts in interior CT scans, we propose a data-driven geometry estimation method that maximizes the consistency between projection data and the reprojection counterparts of a reconstructed volume. Particularly, we use a normalized cross correlation metric to overcome the projection truncation effect. Our approach is validated on a robotic CT scan of a sacrificed mouse and a micro-CT phantom scan, both producing sharper images with finer details than that prior correction.
Read more6/27/2024
0
New!Online 4D Ultrasound-Guided Robotic Tracking Enables 3D Ultrasound Localisation Microscopy with Large Tissue Displacements
Jipeng Yan, Shusei Kawara, Qingyuan Tan, Jingwen Zhu, Bingxue Wang, Matthieu Toulemonde, Honghai Liu, Ying Tan, Meng-Xing Tang
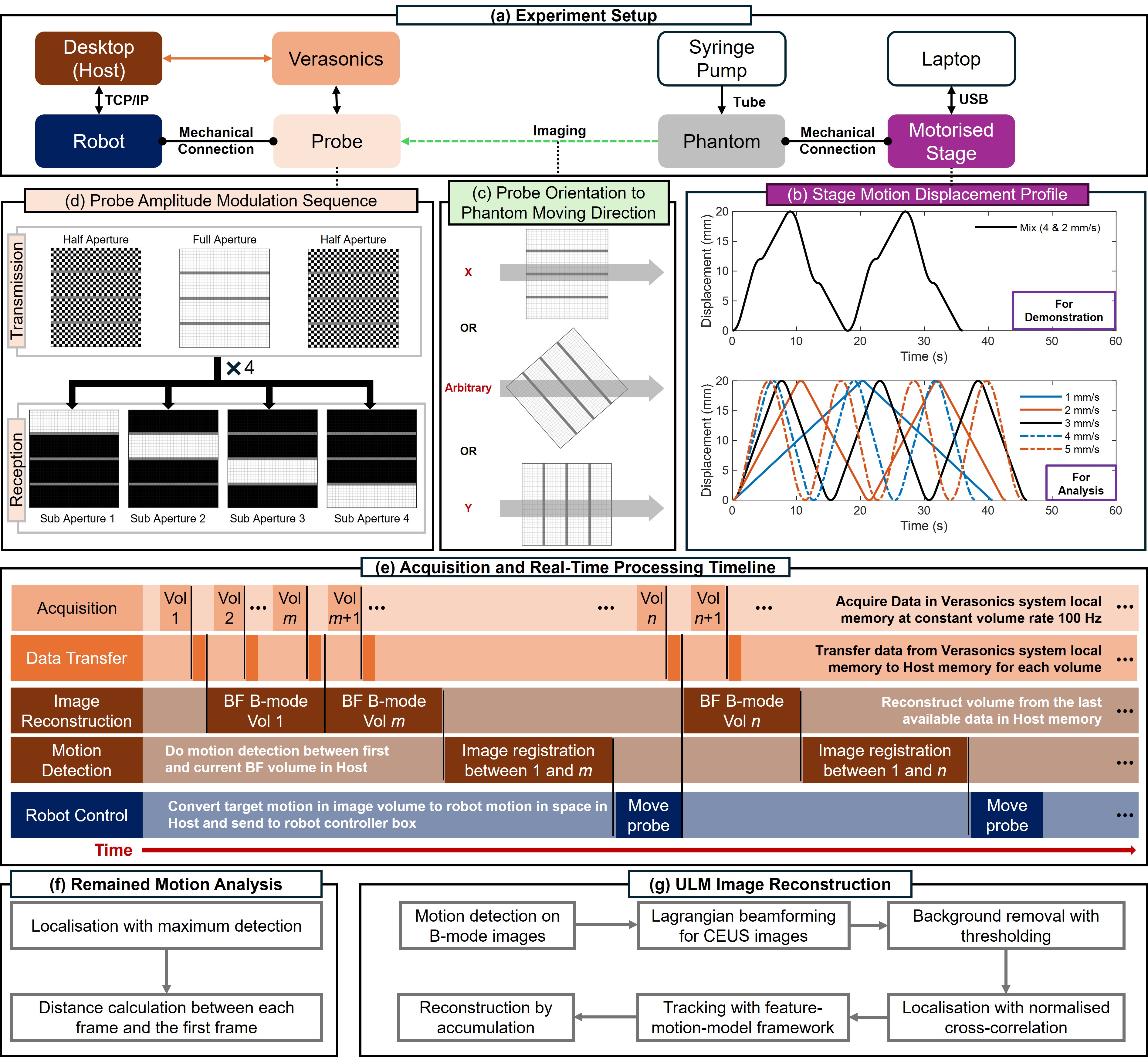
Super-Resolution Ultrasound (SRUS) imaging through localising and tracking microbubbles, also known as Ultrasound Localisation Microscopy (ULM), has demonstrated significant potential for reconstructing microvasculature and flows with sub-diffraction resolution in clinical diagnostics. However, imaging organs with large tissue movements, such as those caused by respiration, presents substantial challenges. Existing methods often require breath holding to maintain accumulation accuracy, which limits data acquisition time and ULM image saturation. To improve image quality in the presence of large tissue movements, this study introduces an approach integrating high-frame-rate ultrasound with online precise robotic probe control. Tested on a microvasculature phantom with translation motions up to 20 mm, twice the aperture size of the matrix array used, our method achieved real-time tracking of the moving phantom and imaging volume rate at 85 Hz, keeping majority of the target volume in the imaging field of view. ULM images of the moving cross channels in the phantom were successfully reconstructed in post-processing, demonstrating the feasibility of super-resolution imaging under large tissue motions. This represents a significant step towards ULM imaging of organs with large motion.
Read more9/18/2024
🌐
0
New!X-ray Fluoroscopy Guided Localization and Steering of Medical Microrobots through Virtual Enhancement
Husnu Halid Alabay, Tuan-Anh Le, Hakan Ceylan
In developing medical interventions using untethered milli- and microrobots, ensuring safety and effectiveness relies on robust methods for detection, real-time tracking, and precise localization within the body. However, the inherent non-transparency of the human body poses a significant obstacle, limiting robot detection primarily to specialized imaging systems such as X-ray fluoroscopy, which often lack crucial anatomical details. Consequently, the robot operator (human or machine) would encounter severe challenges in accurately determining the location of the robot and steering its motion. This study explores the feasibility of circumventing this challenge by creating a simulation environment that contains the precise digital replica (virtual twin) of a model microrobot operational workspace. Synchronizing coordinate systems between the virtual and real worlds and continuously integrating microrobot position data from the image stream into the virtual twin allows the microrobot operator to control navigation in the virtual world. We validate this concept by demonstrating the tracking and steering of a mobile magnetic robot in confined phantoms with high temporal resolution (< 100 ms, with an average of ~20 ms) visual feedback. Additionally, our object detection-based localization approach offers the potential to reduce overall patient exposure to X-ray doses during continuous microrobot tracking without compromising tracking accuracy. Ultimately, we address a critical gap in developing image-guided remote interventions with untethered medical microrobots, particularly for near-future applications in animal models and human patients.
Read more9/16/2024

0
CT-AGRG: Automated Abnormality-Guided Report Generation from 3D Chest CT Volumes
Theo Di Piazza
The rapid increase of computed tomography (CT) scans and their time-consuming manual analysis have created an urgent need for robust automated analysis techniques in clinical settings. These aim to assist radiologists and help them managing their growing workload. Existing methods typically generate entire reports directly from 3D CT images, without explicitly focusing on observed abnormalities. This unguided approach often results in repetitive content or incomplete reports, failing to prioritize anomaly-specific descriptions. We propose a new anomaly-guided report generation model, which first predicts abnormalities and then generates targeted descriptions for each. Evaluation on a public dataset demonstrates significant improvements in report quality and clinical relevance. We extend our work by conducting an ablation study to demonstrate its effectiveness.
Read more9/5/2024