ZARRIO @ Ego4D Short Term Object Interaction Anticipation Challenge: Leveraging Affordances and Attention-based models for STA

0
Sign in to get full access
Overview
- This paper describes the approach used by ZARRIO team for the Ego4D Short Term Object Interaction Anticipation Challenge.
- The team leveraged affordances and attention-based models to anticipate future object interactions in egocentric videos.
- The key focus was on predicting the future state of objects and the user's intended interactions with them.
Plain English Explanation
The paper presents a method for anticipating future object interactions in egocentric videos. The researchers used a combination of affordance-based models and attention-based neural networks to predict how users might interact with objects in the near future.
Affordances refer to the possible actions that an object affords or "allows" a person to perform. For example, a chair affords the action of sitting. By modeling these affordances, the researchers could better anticipate how a person might interact with an object.
The attention-based models helped the system focus on the most relevant parts of the video frames when making predictions. This allowed the model to hone in on the key objects and user behaviors that would be important for predicting future interactions.
Overall, this approach enabled the researchers to anticipate the future state of objects and the user's intended interactions with them in egocentric video, which could have applications in areas like autonomous driving and human-robot interaction.
Technical Explanation
The paper describes the ZARRIO team's approach to the Ego4D Short Term Object Interaction Anticipation Challenge. The key components of their method include:
-
Affordance-based Modeling: The researchers used affordance-based models to capture the potential actions that an object affords a person. This helped the system anticipate how a user might interact with an object in the near future.
-
Attention-based Neural Networks: The team leveraged attention-based neural network architectures to focus the model's "attention" on the most relevant parts of the video frames when making predictions. This allowed the system to hone in on the key objects and user behaviors that would be important for anticipating future interactions.
-
Anticipating Object State Changes: In addition to predicting user interactions, the researchers also aimed to anticipate changes in the future state of objects in the video. This provided a more comprehensive understanding of the upcoming object-related activities.
-
Integrating Affordances and Attention: The affordance-based models and attention-based neural networks were integrated to leverage both the semantic information about object affordances and the dynamic, contextual cues from the video frames to make accurate predictions about future human-object interactions.
Through this combination of approaches, the ZARRIO team was able to effectively anticipate the short-term object interactions in the Ego4D videos, demonstrating the value of leveraging both semantic and attention-based techniques for this task.
Critical Analysis
The paper presents a well-designed and comprehensive approach to the Ego4D Short Term Object Interaction Anticipation Challenge. The integration of affordance-based modeling and attention-based neural networks is a promising direction for anticipating future human-object interactions in egocentric videos.
One potential limitation of the approach is the reliance on pre-trained affordance models, which may not generalize well to all types of objects and environments. The researchers could explore ways to dynamically learn affordances from the data or combine multiple affordance sources to improve the model's adaptability.
Additionally, while the paper focuses on anticipating future object states and interactions, it does not delve into the implications of such predictions, such as how they could be used in real-world applications like autonomous driving or human-robot interaction. Further research could explore the practical uses and ethical considerations of this technology.
Overall, the ZARRIO team's approach demonstrates the value of integrating semantic and attention-based techniques for anticipating future object interactions in egocentric videos, paving the way for advancements in areas like anticipatory AI and human-centered computing.
Conclusion
This paper presents a novel approach that leverages affordances and attention-based models to anticipate short-term object interactions in egocentric videos. By combining semantic information about object affordances with the dynamic, contextual cues captured by attention-based neural networks, the researchers were able to effectively predict how users might interact with objects in the near future.
The integration of these two key techniques – affordance modeling and attention-based learning – represents a promising direction for advancing the field of anticipatory AI and enabling more intuitive and adaptive human-computer/robot interactions. While the paper has some limitations, it serves as an important step towards developing intelligent systems that can better understand and anticipate human behavior in real-world settings.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
ZARRIO @ Ego4D Short Term Object Interaction Anticipation Challenge: Leveraging Affordances and Attention-based models for STA
Lorenzo Mur-Labadia, Ruben Martinez-Cantin, Josechu Guerrero-Campo, Giovanni Maria Farinella
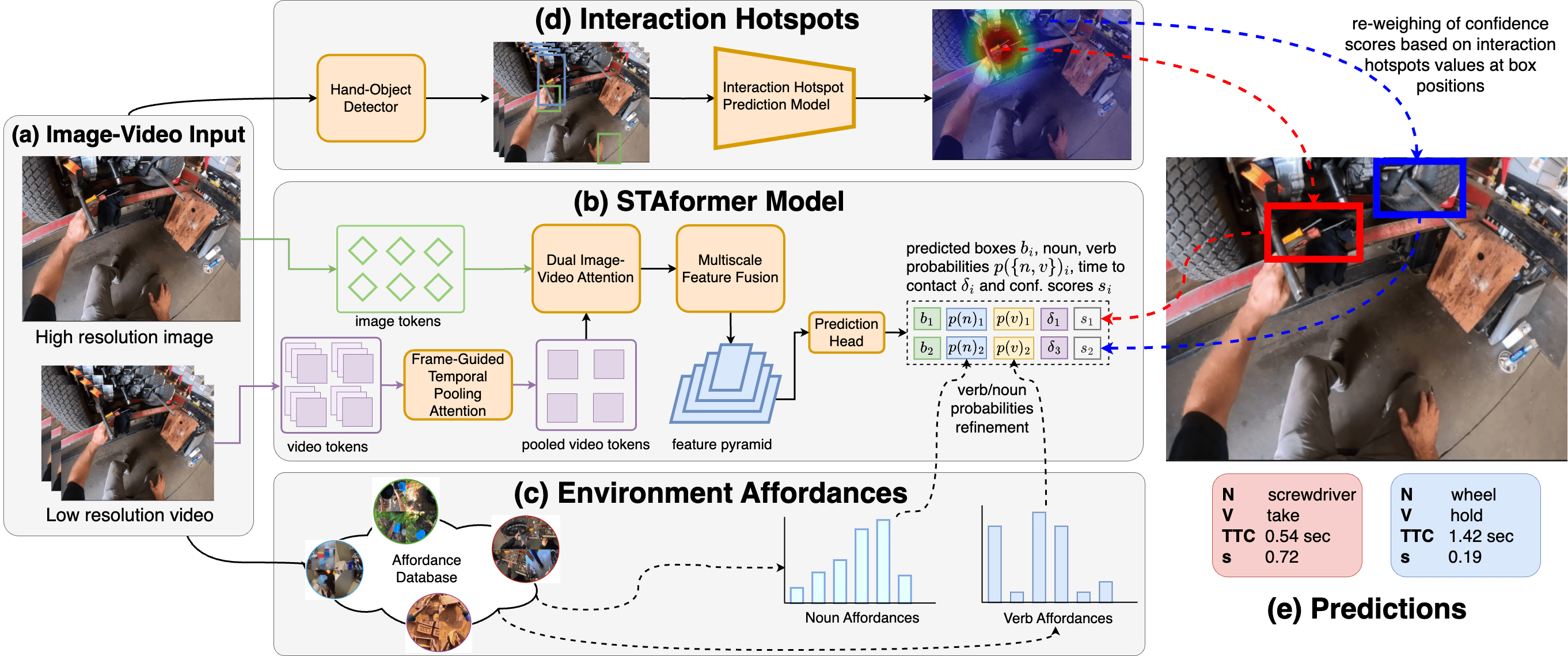
Short-Term object-interaction Anticipation (STA) consists of detecting the location of the next-active objects, the noun and verb categories of the interaction, and the time to contact from the observation of egocentric video. We propose STAformer, a novel attention-based architecture integrating frame-guided temporal pooling, dual image-video attention, and multi-scale feature fusion to support STA predictions from an image-input video pair. Moreover, we introduce two novel modules to ground STA predictions on human behavior by modeling affordances. First, we integrate an environment affordance model which acts as a persistent memory of interactions that can take place in a given physical scene. Second, we predict interaction hotspots from the observation of hands and object trajectories, increasing confidence in STA predictions localized around the hotspot. On the test set, our results obtain a final 33.5 N mAP, 17.25 N+V mAP, 11.77 N+{delta} mAP and 6.75 Overall top-5 mAP metric when trained on the v2 training dataset.
Read more7/8/2024

0
AFF-ttention! Affordances and Attention models for Short-Term Object Interaction Anticipation
Lorenzo Mur-Labadia, Ruben Martinez-Cantin, Josechu Guerrero, Giovanni Maria Farinella, Antonino Furnari
Short-Term object-interaction Anticipation consists of detecting the location of the next-active objects, the noun and verb categories of the interaction, and the time to contact from the observation of egocentric video. This ability is fundamental for wearable assistants or human robot interaction to understand the user goals, but there is still room for improvement to perform STA in a precise and reliable way. In this work, we improve the performance of STA predictions with two contributions: 1. We propose STAformer, a novel attention-based architecture integrating frame guided temporal pooling, dual image-video attention, and multiscale feature fusion to support STA predictions from an image-input video pair. 2. We introduce two novel modules to ground STA predictions on human behavior by modeling affordances.First, we integrate an environment affordance model which acts as a persistent memory of interactions that can take place in a given physical scene. Second, we predict interaction hotspots from the observation of hands and object trajectories, increasing confidence in STA predictions localized around the hotspot. Our results show significant relative Overall Top-5 mAP improvements of up to +45% on Ego4D and +42% on a novel set of curated EPIC-Kitchens STA labels. We will release the code, annotations, and pre extracted affordances on Ego4D and EPIC- Kitchens to encourage future research in this area.
Read more6/6/2024

0
Short-term Object Interaction Anticipation with Disentangled Object Detection @ Ego4D Short Term Object Interaction Anticipation Challenge
Hyunjin Cho, Dong Un Kang, Se Young Chun
Short-term object interaction anticipation is an important task in egocentric video analysis, including precise predictions of future interactions and their timings as well as the categories and positions of the involved active objects. To alleviate the complexity of this task, our proposed method, SOIA-DOD, effectively decompose it into 1) detecting active object and 2) classifying interaction and predicting their timing. Our method first detects all potential active objects in the last frame of egocentric video by fine-tuning a pre-trained YOLOv9. Then, we combine these potential active objects as query with transformer encoder, thereby identifying the most promising next active object and predicting its future interaction and time-to-contact. Experimental results demonstrate that our method outperforms state-of-the-art models on the challenge test set, achieving the best performance in predicting next active objects and their interactions. Finally, our proposed ranked the third overall top-5 mAP when including time-to-contact predictions. The source code is available at https://github.com/KeenyJin/SOIA-DOD.
Read more7/9/2024
🎲
0
Anticipating Object State Changes
Victoria Manousaki, Konstantinos Bacharidis, Filippos Gouidis, Konstantinos Papoutsakis, Dimitris Plexousakis, Antonis Argyros
Anticipating object state changes in images and videos is a challenging problem whose solution has important implications in vision-based scene understanding, automated monitoring systems, and action planning. In this work, we propose the first method for solving this problem. The proposed method predicts object state changes that will occur in the near future as a result of yet unseen human actions. To address this new problem, we propose a novel framework that integrates learnt visual features that represent the recent visual information, with natural language (NLP) features that represent past object state changes and actions. Leveraging the extensive and challenging Ego4D dataset which provides a large-scale collection of first-person perspective videos across numerous interaction scenarios, we introduce new curated annotation data for the object state change anticipation task (OSCA), noted as Ego4D-OSCA. An extensive experimental evaluation was conducted that demonstrates the efficacy of the proposed method in predicting object state changes in dynamic scenarios. The proposed work underscores the potential of integrating video and linguistic cues to enhance the predictive performance of video understanding systems. Moreover, it lays the groundwork for future research on the new task of object state change anticipation. The source code and the new annotation data (Ego4D-OSCA) will be made publicly available.
Read more5/22/2024