ZebraPose: Zebra Detection and Pose Estimation using only Synthetic Data

0

Sign in to get full access
Overview
- This paper presents ZebraPose, a method for detecting and estimating the pose of zebras using only synthetic training data.
- Key innovations include a novel synthetic data generation pipeline and a multi-task convolutional neural network architecture.
- Experiments show that ZebraPose can achieve state-of-the-art performance on zebra pose estimation tasks using only synthetic data, without requiring any real-world annotated data.
Plain English Explanation
The researchers developed a system called ZebraPose that can detect and estimate the posture (or "pose") of zebras in images. Typically, these kinds of computer vision tasks require extensive labeled datasets of real-world images to train the machine learning models. However, the ZebraPose team found a clever way around this requirement.
Instead of using real zebra photos, they generated synthetic data - that is, computer-created images that mimic the appearance of real zebras. They developed a pipeline to automatically create these synthetic images, complete with accurate 3D models of zebra bodies and realistic textures and backgrounds.
They then trained a convolutional neural network to detect zebras in the synthetic images and estimate their precise body poses, such as the angles of their legs, heads, and tails. Remarkably, this network performed just as well on real zebra photos as it did on the synthetic training data, despite never seeing any real-world examples during training.
This breakthrough means that computer vision systems for tasks like wildlife monitoring can be developed without the usual requirement of collecting and labeling large datasets of real-world images. The ZebraPose approach enables effective models to be built using only computer-generated data, saving time and resources.
Technical Explanation
The core innovation of ZebraPose is its ability to train a high-performing zebra detection and pose estimation model using only synthetic training data, without requiring any real-world annotated images.
The researchers developed a pipeline to procedurally generate diverse synthetic zebra images with accurate 3D zebra models, realistic textures and backgrounds, and a wide range of poses and viewing angles. This synthetic dataset allowed them to train a multi-task convolutional neural network to simultaneously detect the presence of zebras and estimate their 3D body poses.
Experiments on benchmark zebra pose estimation datasets showed that the ZebraPose model trained solely on synthetic data could match or even outperform previous state-of-the-art methods that were trained on real-world annotated data. This demonstrates the remarkable capability of synthetic data to serve as an effective substitute for scarce real-world annotations, at least for certain computer vision tasks.
The authors also note that their data synthesis techniques can be extended to other animal species, potentially enabling the development of category-level pose estimators that work across a variety of animals without requiring manual data collection and labeling for each species.
Critical Analysis
The key strength of the ZebraPose approach is its ability to achieve strong performance on zebra pose estimation using only synthetic training data, avoiding the need for costly real-world data collection and annotation. This is a significant advancement, as data scarcity is a common challenge in developing computer vision models for specialized domains like wildlife monitoring.
However, the authors acknowledge several limitations of their current system. First, the synthetic data generation process requires careful 3D modeling and texture mapping to achieve realism, which may be labor-intensive to scale to many animal species. Additionally, the model's performance may degrade when applied to real-world images with significant domain shifts, such as variable lighting conditions or occlusions.
The authors suggest that future work should focus on improving the realism of the synthetic data through techniques like few-shot adaptation or data augmentation. Incorporating a wider range of environmental factors and occlusion patterns in the synthetic data generation process may also help bridge the gap to real-world deployment.
Overall, the ZebraPose approach demonstrates the promising potential of leveraging synthetic data to enable effective computer vision models for specialized domains where real-world annotations are scarce. As the authors note, this methodology could be extended to other animal species, potentially unlocking new opportunities for wildlife monitoring and conservation applications.
Conclusion
The ZebraPose paper presents a novel technique for detecting and estimating the pose of zebras using only synthetic training data, without requiring any real-world annotated images. By developing a robust pipeline for generating diverse, realistic synthetic zebra images, the researchers were able to train a high-performing convolutional neural network model that matched or exceeded the performance of previous state-of-the-art methods.
This breakthrough has significant implications for the development of computer vision systems in specialized domains where real-world data is scarce, such as wildlife monitoring and conservation. The ZebraPose approach demonstrates the potential of synthetic data to serve as an effective substitute for manual data collection and annotation, potentially unlocking new opportunities for deploying AI-powered tools in the field.
As the authors suggest, future work should focus on improving the realism of the synthetic data and exploring ways to bridge the gap to real-world deployment. Nevertheless, the ZebraPose paper represents an important step forward in leveraging the power of synthetic data to advance the state of the art in computer vision.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
ZebraPose: Zebra Detection and Pose Estimation using only Synthetic Data
Elia Bonetto, Aamir Ahmad
Synthetic data is increasingly being used to address the lack of labeled images in uncommon domains for deep learning tasks. A prominent example is 2D pose estimation of animals, particularly wild species like zebras, for which collecting real-world data is complex and impractical. However, many approaches still require real images, consistency and style constraints, sophisticated animal models, and/or powerful pre-trained networks to bridge the syn-to-real gap. Moreover, they often assume that the animal can be reliably detected in images or videos, a hypothesis that often does not hold, e.g. in wildlife scenarios or aerial images. To solve this, we use synthetic data generated with a 3D photorealistic simulator to obtain the first synthetic dataset that can be used for both detection and 2D pose estimation of zebras without applying any of the aforementioned bridging strategies. Unlike previous works, we extensively train and benchmark our detection and 2D pose estimation models on multiple real-world and synthetic datasets using both pre-trained and non-pre-trained backbones. These experiments show how the models trained from scratch and only with synthetic data can consistently generalize to real-world images of zebras in both tasks. Moreover, we show it is possible to easily generalize those same models to 2D pose estimation of horses with a minimal amount of real-world images to account for the domain transfer. Code, results, trained models; and the synthetic, training, and validation data, including 104K manually labeled frames, are provided as open-source at https://zebrapose.is.tue.mpg.de/
Read more8/21/2024
👀
0
FreeZe: Training-free zero-shot 6D pose estimation with geometric and vision foundation models
Andrea Caraffa, Davide Boscaini, Amir Hamza, Fabio Poiesi
Estimating the 6D pose of objects unseen during training is highly desirable yet challenging. Zero-shot object 6D pose estimation methods address this challenge by leveraging additional task-specific supervision provided by large-scale, photo-realistic synthetic datasets. However, their performance heavily depends on the quality and diversity of rendered data and they require extensive training. In this work, we show how to tackle the same task but without training on specific data. We propose FreeZe, a novel solution that harnesses the capabilities of pre-trained geometric and vision foundation models. FreeZe leverages 3D geometric descriptors learned from unrelated 3D point clouds and 2D visual features learned from web-scale 2D images to generate discriminative 3D point-level descriptors. We then estimate the 6D pose of unseen objects by 3D registration based on RANSAC. We also introduce a novel algorithm to solve ambiguous cases due to geometrically symmetric objects that is based on visual features. We comprehensively evaluate FreeZe across the seven core datasets of the BOP Benchmark, which include over a hundred 3D objects and 20,000 images captured in various scenarios. FreeZe consistently outperforms all state-of-the-art approaches, including competitors extensively trained on synthetic 6D pose estimation data. Code will be publicly available at https://andreacaraffa.github.io/freeze.
Read more4/4/2024
0
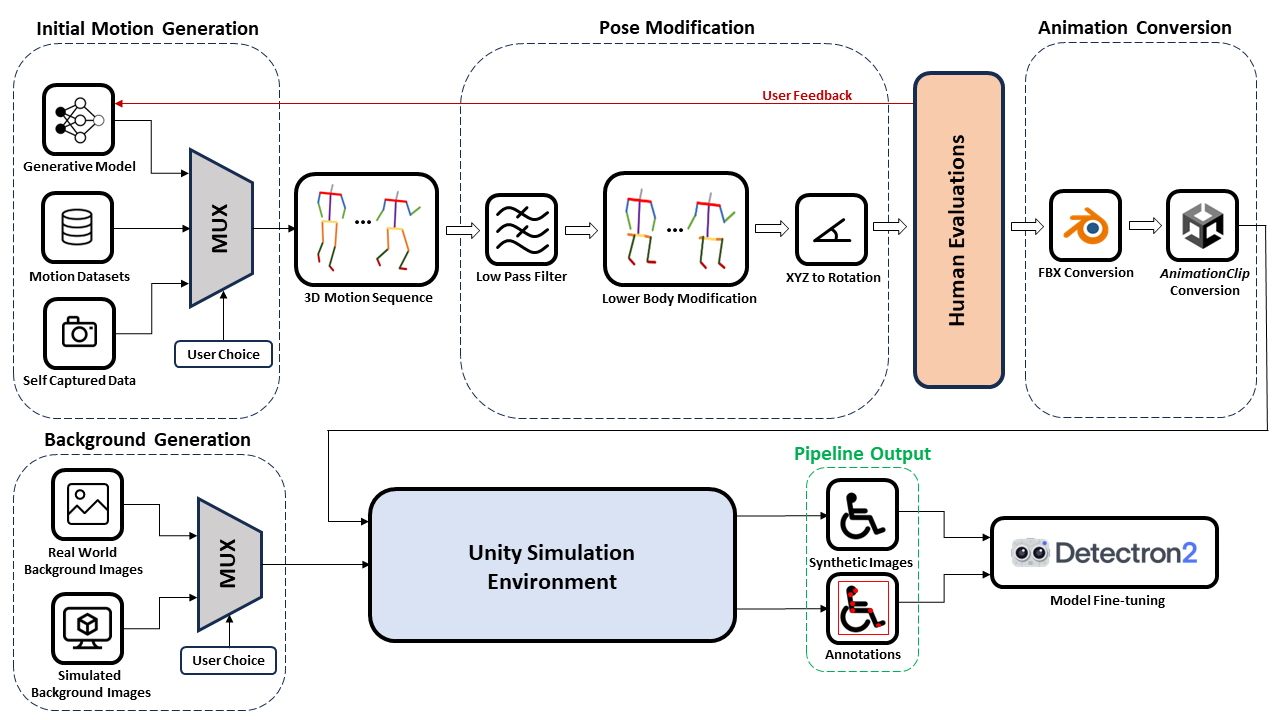
WheelPose: Data Synthesis Techniques to Improve Pose Estimation Performance on Wheelchair Users
William Huang, Sam Ghahremani, Siyou Pei, Yang Zhang
Existing pose estimation models perform poorly on wheelchair users due to a lack of representation in training data. We present a data synthesis pipeline to address this disparity in data collection and subsequently improve pose estimation performance for wheelchair users. Our configurable pipeline generates synthetic data of wheelchair users using motion capture data and motion generation outputs simulated in the Unity game engine. We validated our pipeline by conducting a human evaluation, investigating perceived realism, diversity, and an AI performance evaluation on a set of synthetic datasets from our pipeline that synthesized different backgrounds, models, and postures. We found our generated datasets were perceived as realistic by human evaluators, had more diversity than existing image datasets, and had improved person detection and pose estimation performance when fine-tuned on existing pose estimation models. Through this work, we hope to create a foothold for future efforts in tackling the inclusiveness of AI in a data-centric and human-centric manner with the data synthesis techniques demonstrated in this work. Finally, for future works to extend upon, we open source all code in this research and provide a fully configurable Unity Environment used to generate our datasets. In the case of any models we are unable to share due to redistribution and licensing policies, we provide detailed instructions on how to source and replace said models.
Read more4/29/2024
📊
0
On the power of data augmentation for head pose estimation
Michael Welter
Deep learning has been impressively successful in the last decade in predicting human head poses from monocular images. For in-the-wild inputs, the research community has predominantly relied on a single training set of semi-synthetic nature. This paper suggest the combination of different flavors of synthetic data in order to achieve better generalization to natural images. Moreover, additional expansion of the data volume using traditional out-of-plane rotation synthesis is considered. Together with a novel combination of losses and a network architecture with a standard feature-extractor, a competitive model is obtained, both in accuracy and efficiency, which allows full 6 DoF pose estimation in practical real-time applications.
Read more7/12/2024