An Accelerated Multi-level Monte Carlo Approach for Average Reward Reinforcement Learning with General Policy Parametrization

0
🏅
Sign in to get full access
Overview
- This paper introduces an accelerated multi-level Monte Carlo approach for average reward reinforcement learning with general policy parametrization.
- The method aims to improve the sample efficiency and convergence rate of reinforcement learning algorithms.
- It combines multi-level Monte Carlo sampling with an actor-critic framework to handle complex policy parameterizations.
Plain English Explanation
The paper presents a new reinforcement learning technique that can help agents learn more efficiently in challenging environments. Reinforcement learning is a type of machine learning where agents learn by interacting with their surroundings and receiving rewards or punishments for their actions.
One of the key challenges in reinforcement learning is that it can require a large number of samples, or interactions with the environment, before the agent learns an effective policy. This paper introduces a [object Object] approach that can accelerate the learning process.
The core idea is to combine two powerful techniques: [object Object] and the [object Object]. Multi-level Monte Carlo sampling allows the agent to learn from simulations at different levels of fidelity, ranging from fast but approximate simulations to slower but more accurate ones. The actor-critic framework helps the agent learn both a policy (the "actor" that takes actions) and a value function (the "critic" that evaluates the quality of those actions).
By bringing these two techniques together, the authors develop a reinforcement learning algorithm that can handle complex, high-dimensional policy spaces while still maintaining strong sample efficiency and convergence guarantees. This could be particularly useful in real-world applications where data collection is expensive or time-consuming.
Technical Explanation
The paper proposes an [object Object] approach for [object Object] with [object Object].
The key components of the approach are:
-
Multi-level Monte Carlo Sampling: The method leverages multi-level Monte Carlo sampling to efficiently estimate the policy gradient. This involves running simulations at different levels of fidelity, from fast but approximate to slower but more accurate, and combining the results.
-
Actor-Critic Framework: The algorithm uses an [object Object] to learn both a policy (the "actor") and a value function (the "critic"). This helps the agent learn more effectively in complex environments.
-
General Policy Parametrization: The method can handle general, high-dimensional policy parameterizations, unlike some previous approaches that were limited to simpler policy classes.
The authors provide theoretical analysis to show that the proposed algorithm achieves [object Object] to a stationary point of the average reward objective, with rates that improve upon previous methods.
Critical Analysis
The paper presents a promising approach for improving the sample efficiency and convergence of reinforcement learning algorithms, particularly in complex environments with high-dimensional policy spaces.
One potential limitation is that the theoretical analysis assumes access to a generative model of the environment, which may not be available in all real-world settings. The authors acknowledge this and note that extending the approach to the model-free case is an important direction for future work.
Additionally, the paper focuses on the average reward setting, whereas many practical applications may involve maximizing the total (discounted) reward. Extending the multi-level Monte Carlo approach to the discounted reward case could be a valuable area for further research.
Overall, the paper makes a valuable contribution to the field of reinforcement learning by introducing a novel technique that can significantly improve sample efficiency and convergence, with potential applications in a wide range of domains.
Conclusion
This paper presents an [object Object] for [object Object] with [object Object]. The key innovation is the combination of multi-level Monte Carlo sampling and an actor-critic framework, which enables efficient learning in complex environments with high-dimensional policy spaces.
The theoretical analysis shows that the proposed algorithm achieves sample-efficient convergence to a stationary point of the average reward objective. This could have significant practical implications, as it suggests a way to develop more sample-efficient reinforcement learning agents that can tackle challenging real-world problems.
Overall, this work represents an important advance in the field of reinforcement learning and could pave the way for more effective and practical applications of this powerful technique.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🏅
0
An Accelerated Multi-level Monte Carlo Approach for Average Reward Reinforcement Learning with General Policy Parametrization
Swetha Ganesh, Vaneet Aggarwal
In our study, we delve into average-reward reinforcement learning with general policy parametrization. Within this domain, current guarantees either fall short with suboptimal guarantees or demand prior knowledge of mixing time. To address these issues, we introduce Randomized Accelerated Natural Actor Critic, a method that integrates Multi-level Monte-Carlo and Natural Actor Critic. Our approach is the first to achieve global convergence rate of $tilde{mathcal{O}}(1/sqrt{T})$ without requiring knowledge of mixing time, significantly surpassing the state-of-the-art bound of $tilde{mathcal{O}}(1/T^{1/4})$.
Read more7/29/2024
0
Global Optimality without Mixing Time Oracles in Average-reward RL via Multi-level Actor-Critic
Bhrij Patel, Wesley A. Suttle, Alec Koppel, Vaneet Aggarwal, Brian M. Sadler, Amrit Singh Bedi, Dinesh Manocha
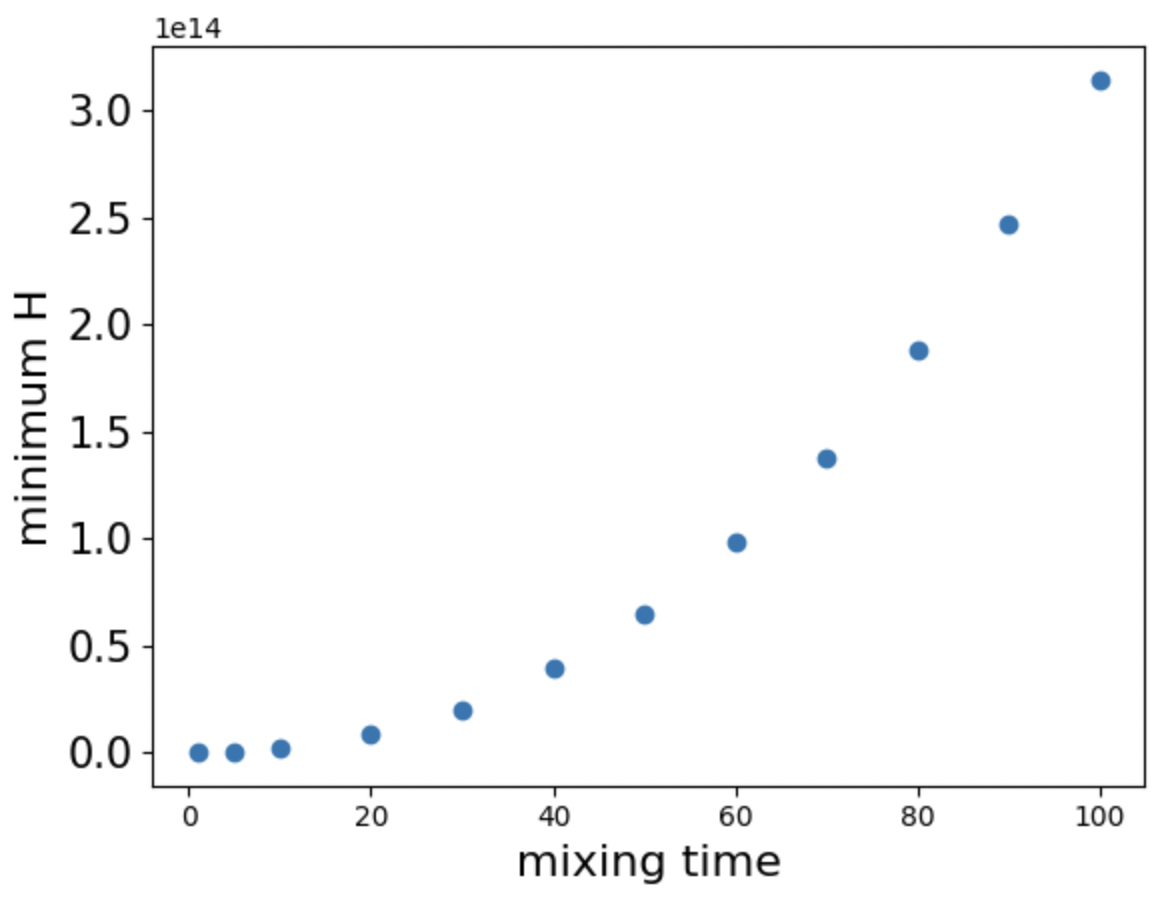
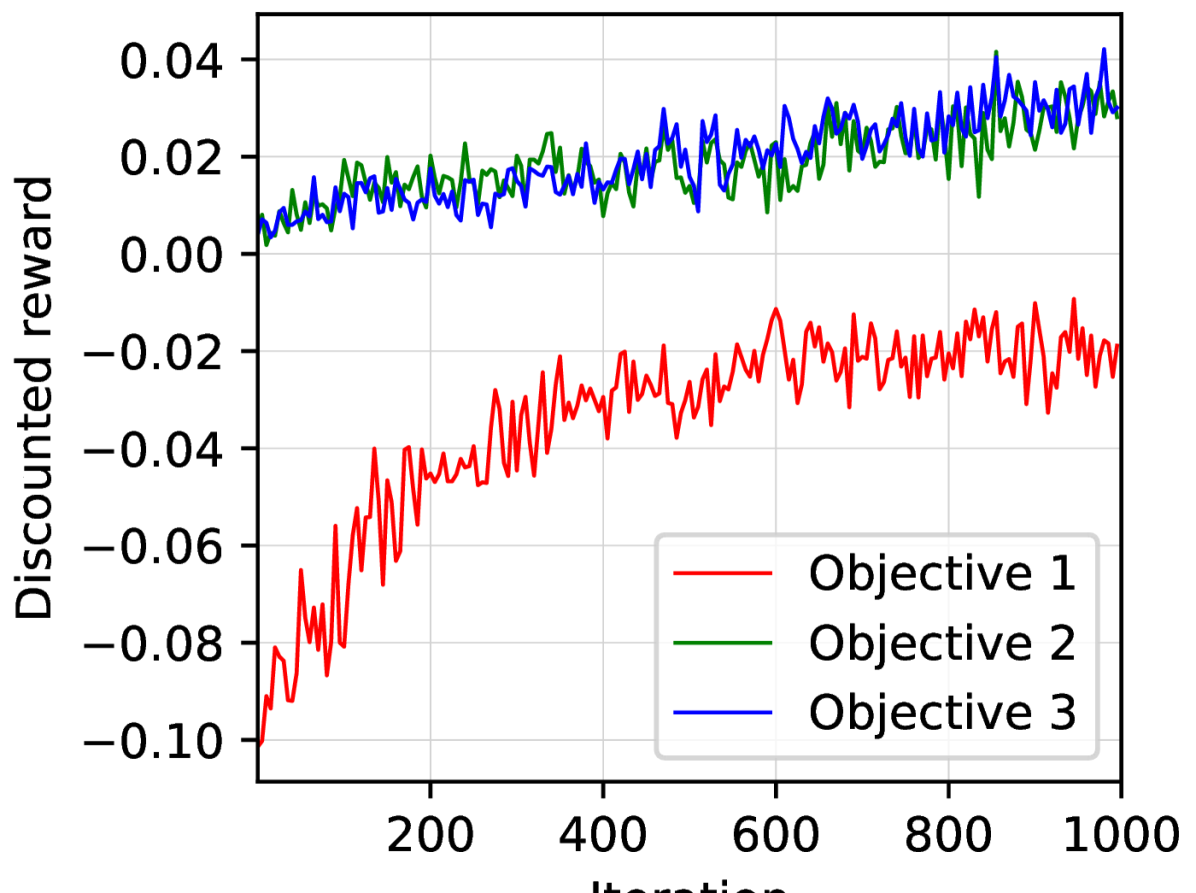
In the context of average-reward reinforcement learning, the requirement for oracle knowledge of the mixing time, a measure of the duration a Markov chain under a fixed policy needs to achieve its stationary distribution, poses a significant challenge for the global convergence of policy gradient methods. This requirement is particularly problematic due to the difficulty and expense of estimating mixing time in environments with large state spaces, leading to the necessity of impractically long trajectories for effective gradient estimation in practical applications. To address this limitation, we consider the Multi-level Actor-Critic (MAC) framework, which incorporates a Multi-level Monte-Carlo (MLMC) gradient estimator. With our approach, we effectively alleviate the dependency on mixing time knowledge, a first for average-reward MDPs global convergence. Furthermore, our approach exhibits the tightest available dependence of $mathcal{O}left( sqrt{tau_{mix}} right)$known from prior work. With a 2D grid world goal-reaching navigation experiment, we demonstrate that MAC outperforms the existing state-of-the-art policy gradient-based method for average reward settings.
Read more6/24/2024
🌿
0
Natural Policy Gradient and Actor Critic Methods for Constrained Multi-Task Reinforcement Learning
Sihan Zeng, Thinh T. Doan, Justin Romberg
Multi-task reinforcement learning (RL) aims to find a single policy that effectively solves multiple tasks at the same time. This paper presents a constrained formulation for multi-task RL where the goal is to maximize the average performance of the policy across tasks subject to bounds on the performance in each task. We consider solving this problem both in the centralized setting, where information for all tasks is accessible to a single server, and in the decentralized setting, where a network of agents, each given one task and observing local information, cooperate to find the solution of the globally constrained objective using local communication. We first propose a primal-dual algorithm that provably converges to the globally optimal solution of this constrained formulation under exact gradient evaluations. When the gradient is unknown, we further develop a sampled-based actor-critic algorithm that finds the optimal policy using online samples of state, action, and reward. Finally, we study the extension of the algorithm to the linear function approximation setting.
Read more5/7/2024
0
Finite-Time Convergence and Sample Complexity of Actor-Critic Multi-Objective Reinforcement Learning
Tianchen Zhou, FNU Hairi, Haibo Yang, Jia Liu, Tian Tong, Fan Yang, Michinari Momma, Yan Gao
Reinforcement learning with multiple, potentially conflicting objectives is pervasive in real-world applications, while this problem remains theoretically under-explored. This paper tackles the multi-objective reinforcement learning (MORL) problem and introduces an innovative actor-critic algorithm named MOAC which finds a policy by iteratively making trade-offs among conflicting reward signals. Notably, we provide the first analysis of finite-time Pareto-stationary convergence and corresponding sample complexity in both discounted and average reward settings. Our approach has two salient features: (a) MOAC mitigates the cumulative estimation bias resulting from finding an optimal common gradient descent direction out of stochastic samples. This enables provable convergence rate and sample complexity guarantees independent of the number of objectives; (b) With proper momentum coefficient, MOAC initializes the weights of individual policy gradients using samples from the environment, instead of manual initialization. This enhances the practicality and robustness of our algorithm. Finally, experiments conducted on a real-world dataset validate the effectiveness of our proposed method.
Read more5/10/2024