Finite-Time Convergence and Sample Complexity of Actor-Critic Multi-Objective Reinforcement Learning
2405.03082
0
0
Abstract
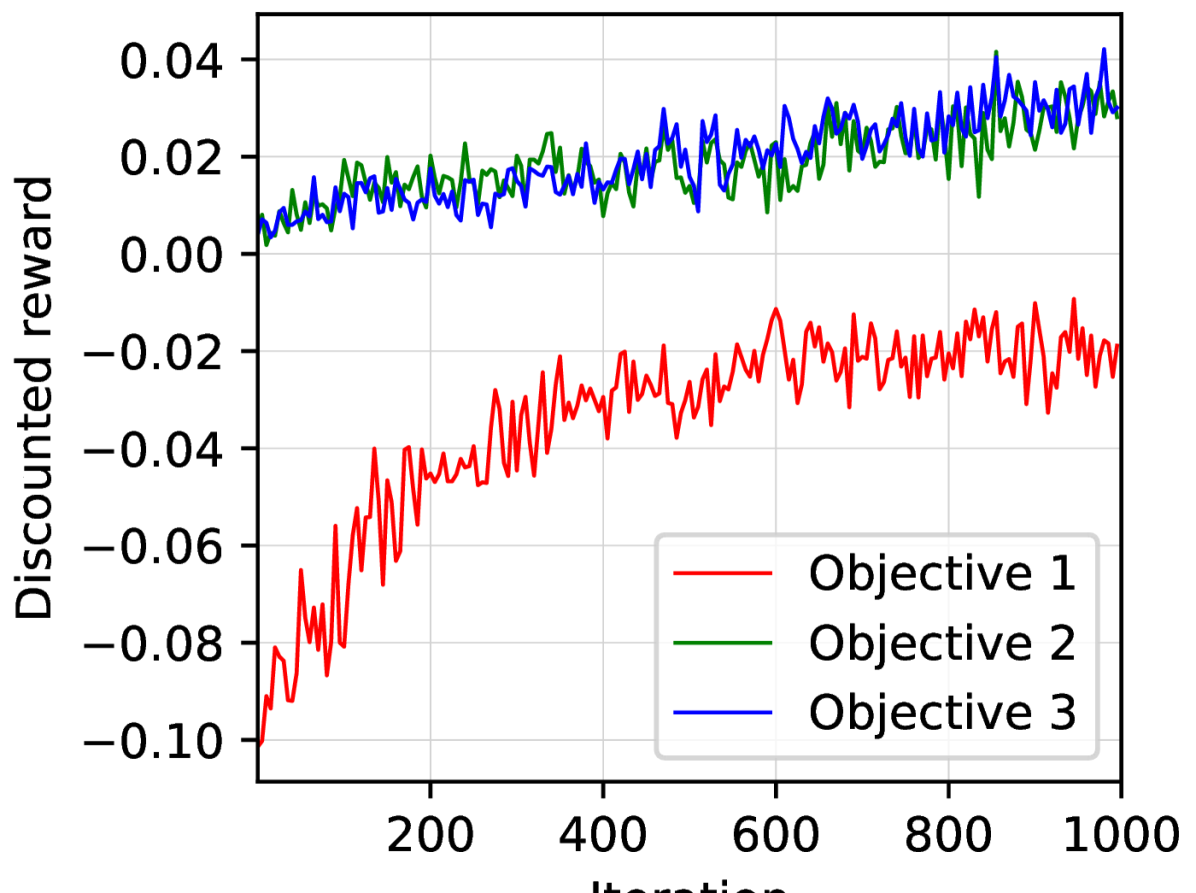
Reinforcement learning with multiple, potentially conflicting objectives is pervasive in real-world applications, while this problem remains theoretically under-explored. This paper tackles the multi-objective reinforcement learning (MORL) problem and introduces an innovative actor-critic algorithm named MOAC which finds a policy by iteratively making trade-offs among conflicting reward signals. Notably, we provide the first analysis of finite-time Pareto-stationary convergence and corresponding sample complexity in both discounted and average reward settings. Our approach has two salient features: (a) MOAC mitigates the cumulative estimation bias resulting from finding an optimal common gradient descent direction out of stochastic samples. This enables provable convergence rate and sample complexity guarantees independent of the number of objectives; (b) With proper momentum coefficient, MOAC initializes the weights of individual policy gradients using samples from the environment, instead of manual initialization. This enhances the practicality and robustness of our algorithm. Finally, experiments conducted on a real-world dataset validate the effectiveness of our proposed method.
Create account to get full access
Overview
- This paper proposes a new actor-critic algorithm for multi-objective reinforcement learning (MORL) that achieves finite-time convergence and sample efficiency.
- The authors provide theoretical guarantees on the algorithm's convergence rate and sample complexity, making it suitable for practical applications.
- The algorithm is evaluated on several benchmark MORL problems, demonstrating its effectiveness compared to state-of-the-art methods.
Plain English Explanation
In reinforcement learning, an agent learns to make decisions by interacting with an environment and receiving rewards. When there are multiple, potentially conflicting objectives, this becomes a multi-objective reinforcement learning (MORL) problem. Demonstration-Guided Multi-Objective Reinforcement Learning and Natural Policy Gradient Actor-Critic Methods for Constrained are examples of MORL approaches.
The paper presents a new actor-critic algorithm for MORL that is both efficient and reliable. Actor-critic methods, like Actor-Critic Reinforcement Learning with Phased Actor Updates, learn both a policy (the "actor") and a value function (the "critic") to guide the agent's decision-making.
The key innovation in this work is that the algorithm is designed to converge in a finite number of steps and requires a manageable number of samples from the environment, making it practical for real-world applications. This is achieved through careful mathematical analysis and algorithm design.
The authors evaluate their method on several benchmark MORL problems and show that it outperforms existing state-of-the-art approaches, like UCB-Driven Utility Function Search for Multi-Objective and Closing the Gap: Achieving Global Convergence of Last-Iterate methods, in terms of both performance and sample efficiency.
Technical Explanation
The paper proposes a new actor-critic algorithm for multi-objective reinforcement learning (MORL) called Finite-Time Actor-Critic (FTAC). The key features of FTAC are:
- Finite-Time Convergence: The authors prove that FTAC converges to the optimal policy in a finite number of iterations, unlike many existing MORL algorithms that only guarantee asymptotic convergence.
- Sample Efficiency: The authors also provide bounds on the sample complexity of FTAC, showing that it requires a manageable number of samples from the environment to achieve near-optimal performance.
- Practical Implementation: FTAC is designed to be implementable in practice, with careful consideration of hyperparameter tuning and other practical aspects.
The FTAC algorithm consists of two main components: an actor network that learns the policy, and a critic network that learns the value function. The actor and critic are updated in an alternating fashion, with the critic update using a multi-objective variant of temporal difference learning and the actor update using a novel multi-objective policy gradient method.
The authors provide a detailed theoretical analysis of FTAC, proving bounds on its convergence rate and sample complexity. They also evaluate FTAC on several benchmark MORL problems, including classic control tasks and navigation problems, and demonstrate its superiority over state-of-the-art MORL algorithms in terms of both performance and sample efficiency.
Critical Analysis
The paper presents a well-designed and theoretically-grounded MORL algorithm with strong empirical performance. The finite-time convergence and sample efficiency guarantees are particularly noteworthy, as they make the algorithm suitable for practical applications where sample efficiency and reliable performance are crucial.
However, the paper does not explore the algorithm's behavior in more complex, high-dimensional MORL problems, which may require further modifications or extensions to the basic FTAC framework. Additionally, the authors do not discuss potential limitations or caveats of their approach, such as the impact of hyperparameter tuning or the algorithm's robustness to model misspecification or distribution shift.
Further research could also investigate the scalability of FTAC to larger-scale problems, as well as its performance in continuous action spaces or partially observed environments. Comparisons to other recent MORL algorithms, such as those that leverage demonstration guidance or constrained policy optimization, could also provide additional insights.
Conclusion
This paper presents a promising new actor-critic algorithm for multi-objective reinforcement learning that achieves finite-time convergence and sample efficiency. The theoretical guarantees and strong empirical performance make FTAC a valuable contribution to the MORL literature, with potential for practical applications in domains where reliable and sample-efficient decision-making is crucial. Further exploration of the algorithm's scalability and robustness could lead to even broader applicability in the future.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🏅
Finite-Time Analysis for Conflict-Avoidant Multi-Task Reinforcement Learning
Yudan Wang, Peiyao Xiao, Hao Ban, Kaiyi Ji, Shaofeng Zou
0
0
Multi-task reinforcement learning (MTRL) has shown great promise in many real-world applications. Existing MTRL algorithms often aim to learn a policy that optimizes individual objective functions simultaneously with a given prior preference (or weights) on different tasks. However, these methods often suffer from the issue of textit{gradient conflict} such that the tasks with larger gradients dominate the update direction, resulting in a performance degeneration on other tasks. In this paper, we develop a novel dynamic weighting multi-task actor-critic algorithm (MTAC) under two options of sub-procedures named as CA and FC in task weight updates. MTAC-CA aims to find a conflict-avoidant (CA) update direction that maximizes the minimum value improvement among tasks, and MTAC-FC targets at a much faster convergence rate. We provide a comprehensive finite-time convergence analysis for both algorithms. We show that MTAC-CA can find a $epsilon+epsilon_{text{app}}$-accurate Pareto stationary policy using $mathcal{O}({epsilon^{-5}})$ samples, while ensuring a small $epsilon+sqrt{epsilon_{text{app}}}$-level CA distance (defined as the distance to the CA direction), where $epsilon_{text{app}}$ is the function approximation error. The analysis also shows that MTAC-FC improves the sample complexity to $mathcal{O}(epsilon^{-3})$, but with a constant-level CA distance. Our experiments on MT10 demonstrate the improved performance of our algorithms over existing MTRL methods with fixed preference.
6/12/2024

Demonstration Guided Multi-Objective Reinforcement Learning
Junlin Lu, Patrick Mannion, Karl Mason
0
0
Multi-objective reinforcement learning (MORL) is increasingly relevant due to its resemblance to real-world scenarios requiring trade-offs between multiple objectives. Catering to diverse user preferences, traditional reinforcement learning faces amplified challenges in MORL. To address the difficulty of training policies from scratch in MORL, we introduce demonstration-guided multi-objective reinforcement learning (DG-MORL). This novel approach utilizes prior demonstrations, aligns them with user preferences via corner weight support, and incorporates a self-evolving mechanism to refine suboptimal demonstrations. Our empirical studies demonstrate DG-MORL's superiority over existing MORL algorithms, establishing its robustness and efficacy, particularly under challenging conditions. We also provide an upper bound of the algorithm's sample complexity.
4/8/2024
Global Optimality without Mixing Time Oracles in Average-reward RL via Multi-level Actor-Critic
Bhrij Patel, Wesley A. Suttle, Alec Koppel, Vaneet Aggarwal, Brian M. Sadler, Amrit Singh Bedi, Dinesh Manocha
0
0
In the context of average-reward reinforcement learning, the requirement for oracle knowledge of the mixing time, a measure of the duration a Markov chain under a fixed policy needs to achieve its stationary distribution, poses a significant challenge for the global convergence of policy gradient methods. This requirement is particularly problematic due to the difficulty and expense of estimating mixing time in environments with large state spaces, leading to the necessity of impractically long trajectories for effective gradient estimation in practical applications. To address this limitation, we consider the Multi-level Actor-Critic (MAC) framework, which incorporates a Multi-level Monte-Carlo (MLMC) gradient estimator. With our approach, we effectively alleviate the dependency on mixing time knowledge, a first for average-reward MDPs global convergence. Furthermore, our approach exhibits the tightest available dependence of $mathcal{O}left( sqrt{tau_{mix}} right)$known from prior work. With a 2D grid world goal-reaching navigation experiment, we demonstrate that MAC outperforms the existing state-of-the-art policy gradient-based method for average reward settings.
6/24/2024
🌿
Natural Policy Gradient and Actor Critic Methods for Constrained Multi-Task Reinforcement Learning
Sihan Zeng, Thinh T. Doan, Justin Romberg
0
0
Multi-task reinforcement learning (RL) aims to find a single policy that effectively solves multiple tasks at the same time. This paper presents a constrained formulation for multi-task RL where the goal is to maximize the average performance of the policy across tasks subject to bounds on the performance in each task. We consider solving this problem both in the centralized setting, where information for all tasks is accessible to a single server, and in the decentralized setting, where a network of agents, each given one task and observing local information, cooperate to find the solution of the globally constrained objective using local communication. We first propose a primal-dual algorithm that provably converges to the globally optimal solution of this constrained formulation under exact gradient evaluations. When the gradient is unknown, we further develop a sampled-based actor-critic algorithm that finds the optimal policy using online samples of state, action, and reward. Finally, we study the extension of the algorithm to the linear function approximation setting.
5/7/2024