Accelerating the Evolution of Personalized Automated Lane Change through Lesson Learning

0
🔍
Sign in to get full access
Overview
- Personalization is crucial for widespread adoption of advanced driver assistance systems (ADAS)
- Conventional evolution methods require a lot of computing power and cannot be applied online
- This paper proposes a "lesson learning" approach that learns from driver's takeover interventions to enable faster, more efficient personalization
Plain English Explanation
This paper explores how to make advanced driver assistance systems (ADAS) more personalized and tailored to individual drivers. Personalization is important for widespread adoption of these systems, but current methods for evolving the system to match each user's preferences require a lot of computing power and can't be done in real-time.
The researchers propose a new "lesson learning" approach that learns from the times when drivers have to take over control from the ADAS. By analyzing these takeover events, the system can generate a "driving zone" that ensures the driver feels safe. It then uses this information to make real-time corrections to the trajectory planning rewards, guided by the goal of optimizing rewards within the constraints of this driving zone.
This lesson learning framework is designed to be faster, more efficient at accumulating experience, and computationally efficient compared to conventional methods. The simulation results show that it can consistently achieve successful customization for individual drivers without requiring further takeover interventions. The system was able to improve its evolution efficiency by 24% through accumulated experience, and only needed an average of 13.8 learning iterations, taking just 0.08 seconds on average.
Technical Explanation
The key innovation in this paper is the "lesson learning" approach, which leverages driver takeover interventions to personalize the ADAS. Conventional evolution methods learn from naturalistic driving data, but this requires significant computing power and can't be done online.
In contrast, the proposed system uses Gaussian discriminant analysis to generate a "driving zone" based on the online takeover data. This ensures the ADAS trajectory planning respects the driver's perceived safety constraints. The system then employs apprenticeship learning to make real-time corrections to the trajectory planning rewards, guided by the objective of optimizing rewards within this driving zone.
This is implemented using model predictive control for the trajectory planning. The researchers demonstrate through simulations that this lesson learning framework can achieve successful customization for individual drivers much more efficiently than prior methods. The accumulated experience leads to a 24% improvement in evolution efficiency, with an average of only 13.8 learning iterations taking just 0.08 seconds.
Critical Analysis
The paper makes a strong case for the benefits of the lesson learning approach, showing impressive results in terms of speed, efficiency, and the ability to personalize the ADAS without further driver interventions. However, the simulations were conducted in a controlled environment, and it's unclear how well the system would perform in real-world, dynamic driving conditions.
Additionally, the paper does not address potential issues around driver trust and acceptance of the system, which can be a significant barrier to widespread adoption. The dilemma zone problem is also not discussed, which could be an important consideration for real-world deployment.
Further research would be needed to validate the approach in more realistic scenarios, and to explore how it might be integrated with other techniques, such as deep reinforcement learning for longitudinal control or large language model-empowered collaborative driving.
Conclusion
This paper presents a novel "lesson learning" approach to personalizing advanced driver assistance systems, which addresses the limitations of conventional evolution methods that require significant computing power and cannot be applied online. By leveraging driver takeover interventions, the system can generate a driving zone that ensures perceived safety and make real-time corrections to the trajectory planning.
The simulation results demonstrate that this framework can achieve successful customization much more efficiently than prior techniques, with a 24% improvement in evolution efficiency and an average of just 13.8 learning iterations. While further research is needed to validate the approach in real-world conditions, this work represents an important step forward in making ADAS systems more personalized and widely adopted.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🔍
0
Accelerating the Evolution of Personalized Automated Lane Change through Lesson Learning
Jia Hu (Jason), Mingyue Lei (Jason), Duo Li (Jason), Zhenning Li (Jason), Jaehyun (Jason), So, Haoran Wang
Personalization is crucial for the widespread adoption of advanced driver assistance system. To match up with each user's preference, the online evolution capability is a must. However, conventional evolution methods learn from naturalistic driving data, which requires a lot computing power and cannot be applied online. To address this challenge, this paper proposes a lesson learning approach: learning from driver's takeover interventions. By leveraging online takeover data, the driving zone is generated to ensure perceived safety using Gaussian discriminant analysis. Real-time corrections to trajectory planning rewards are enacted through apprenticeship learning. Guided by the objective of optimizing rewards within the constraints of the driving zone, this approach employs model predictive control for trajectory planning. This lesson learning framework is highlighted for its faster evolution capability, adeptness at experience accumulating, assurance of perceived safety, and computational efficiency. Simulation results demonstrate that the proposed system consistently achieves a successful customization without further takeover interventions. Accumulated experience yields a 24% enhancement in evolution efficiency. The average number of learning iterations is only 13.8. The average computation time is 0.08 seconds.
Read more5/14/2024
0
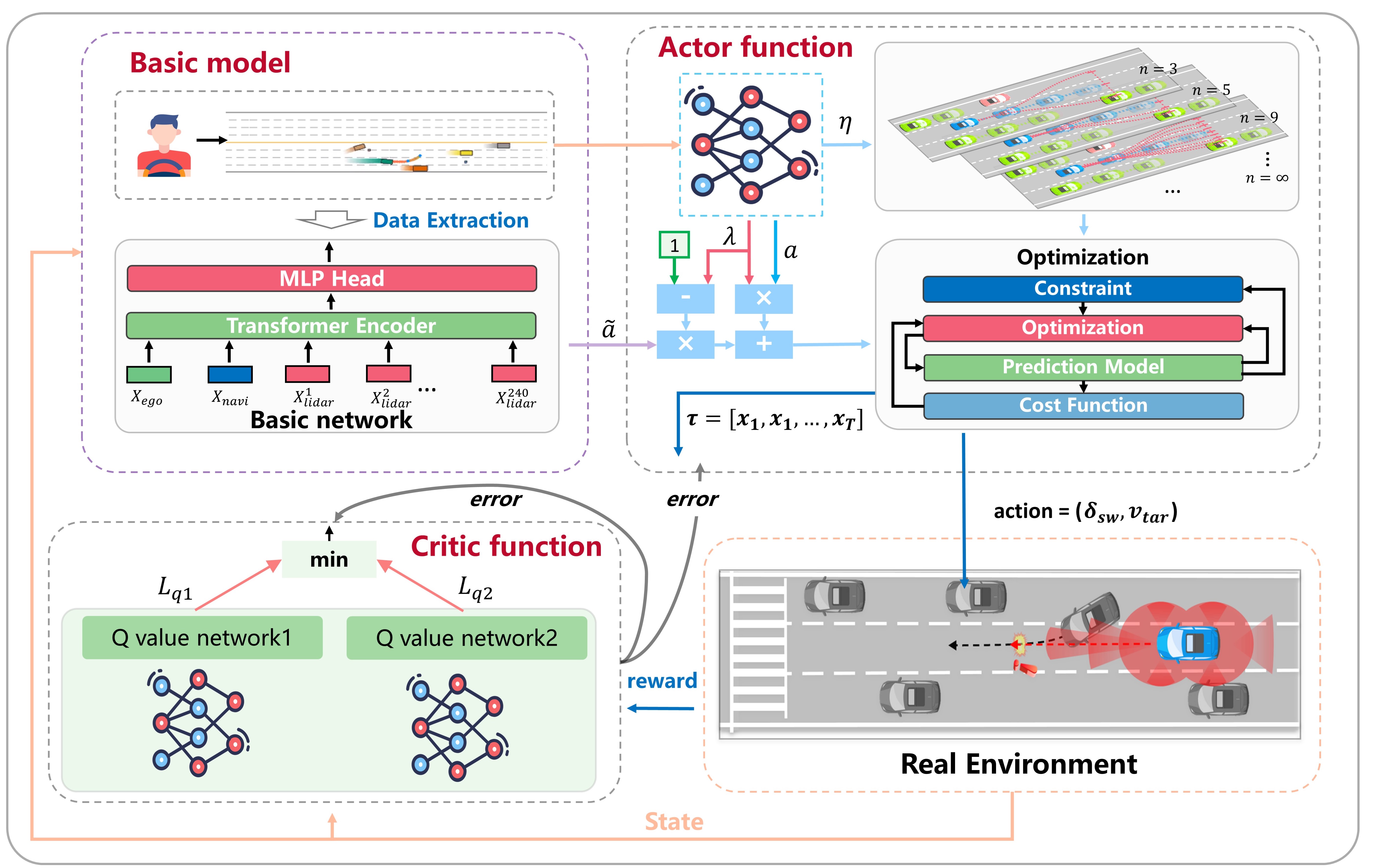
A Safety-Oriented Self-Learning Algorithm for Autonomous Driving: Evolution Starting from a Basic Model
Shuo Yang, Caojun Wang, Zhenyu Ma, Yanjun Huang, Hong Chen
Autonomous driving vehicles with self-learning capabilities are expected to evolve in complex environments to improve their ability to cope with different scenarios. However, most self-learning algorithms suffer from low learning efficiency and lacking safety, which limits their applications. This paper proposes a safety-oriented self-learning algorithm for autonomous driving, which focuses on how to achieve evolution from a basic model. Specifically, a basic model based on the transformer encoder is designed to extract and output policy features from a small number of demonstration trajectories. To improve the learning efficiency, a policy mixed approach is developed. The basic model provides initial values to improve exploration efficiency, and the self-learning algorithm enhances the adaptability and generalization of the model, enabling continuous improvement without external intervention. Finally, an actor approximator based on receding horizon optimization is designed considering the constraints of the environmental input to ensure safety. The proposed method is verified in a challenging mixed traffic environment with pedestrians and vehicles. Simulation and real-vehicle test results show that the proposed method can safely and efficiently learn appropriate autonomous driving behaviors. Compared reinforcement learning and behavior cloning methods, it can achieve comprehensive improvement in learning efficiency and performance under the premise of ensuring safety.
Read more8/23/2024
0
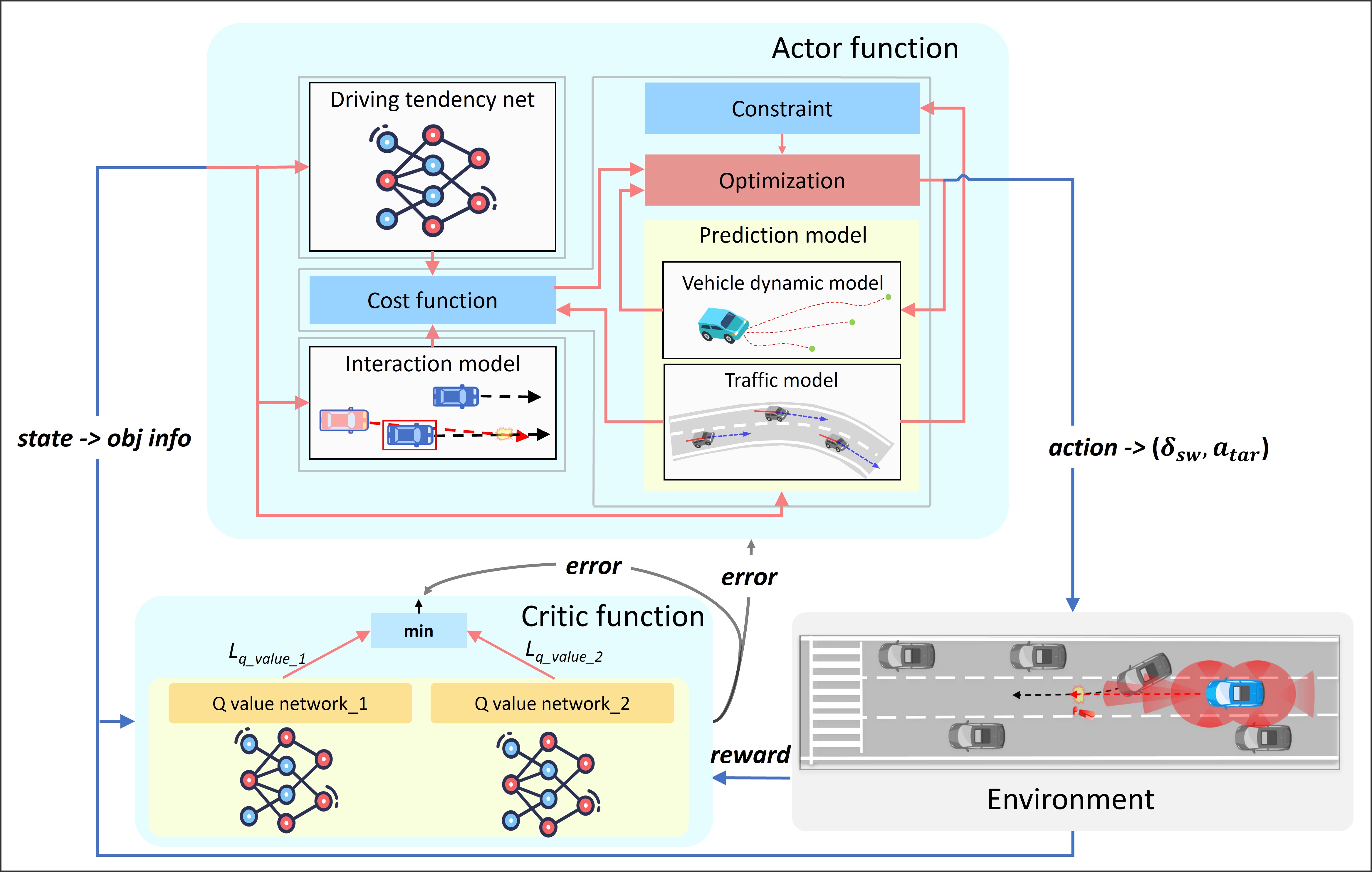
A Safe and Efficient Self-evolving Algorithm for Decision-making and Control of Autonomous Driving Systems
Shuo Yang, Liwen Wang, Yanjun Huang, Hong Chen
Autonomous vehicles with a self-evolving ability are expected to cope with unknown scenarios in the real-world environment. Take advantage of trial and error mechanism, reinforcement learning is able to self evolve by learning the optimal policy, and it is particularly well suitable for solving decision-making problems. However, reinforcement learning suffers from safety issues and low learning efficiency, especially in the continuous action space. Therefore, the motivation of this paper is to address the above problem by proposing a hybrid Mechanism-Experience-Learning augmented approach. Specifically, to realize the efficient self-evolution, the driving tendency by analogy with human driving experience is proposed to reduce the search space of the autonomous driving problem, while the constrained optimization problem based on a mechanistic model is designed to ensure safety during the self-evolving process. Experimental results show that the proposed method is capable of generating safe and reasonable actions in various complex scenarios, improving the performance of the autonomous driving system. Compared to conventional reinforcement learning, the safety and efficiency of the proposed algorithm are greatly improved. The training process is collision-free, and the training time is equivalent to less than 10 minutes in the real world.
Read more8/23/2024
🔮
0
Driver Digital Twin for Online Prediction of Personalized Lane Change Behavior
Xishun Liao, Xuanpeng Zhao, Ziran Wang, Zhouqiao Zhao, Kyungtae Han, Rohit Gupta, Matthew J. Barth, Guoyuan Wu
Connected and automated vehicles (CAVs) are supposed to share the road with human-driven vehicles (HDVs) in a foreseeable future. Therefore, considering the mixed traffic environment is more pragmatic, as the well-planned operation of CAVs may be interrupted by HDVs. In the circumstance that human behaviors have significant impacts, CAVs need to understand HDV behaviors to make safe actions. In this study, we develop a Driver Digital Twin (DDT) for the online prediction of personalized lane change behavior, allowing CAVs to predict surrounding vehicles' behaviors with the help of the digital twin technology. DDT is deployed on a vehicle-edge-cloud architecture, where the cloud server models the driver behavior for each HDV based on the historical naturalistic driving data, while the edge server processes the real-time data from each driver with his/her digital twin on the cloud to predict the lane change maneuver. The proposed system is first evaluated on a human-in-the-loop co-simulation platform, and then in a field implementation with three passenger vehicles connected through the 4G/LTE cellular network. The lane change intention can be recognized in 6 seconds on average before the vehicle crosses the lane separation line, and the Mean Euclidean Distance between the predicted trajectory and GPS ground truth is 1.03 meters within a 4-second prediction window. Compared to the general model, using a personalized model can improve prediction accuracy by 27.8%. The demonstration video of the proposed system can be watched at https://youtu.be/5cbsabgIOdM.
Read more9/5/2024